Wetenschap
Astronauten gaan een proefrit maken met een maanrobot vanuit het ruimtestation
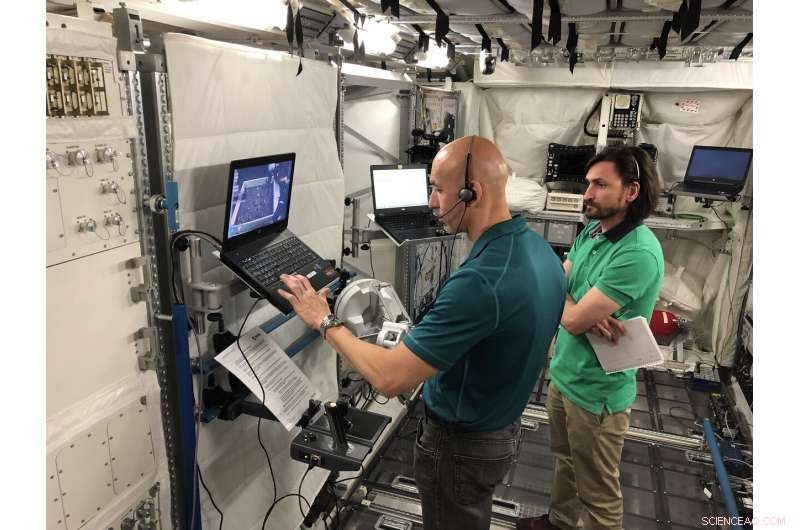
ESA-astronaut Luca Parmitano bereidt zich voor op ANALOG-1-experimenten op de grond in het European Astronaut Centre in Keulen, Duitsland. Het onderzoek vereist dat hij een op aarde gebaseerde rover op afstand bestuurt vanuit het ruimtestation. Krediet:ESA
Astronauten zouden op een dag de maan- en Marsrovers op afstand kunnen besturen vanuit een baan om de aarde. Een aanstaande test aan boord van het internationale ruimtestation ISS zou dit mogelijk kunnen maken. In november, de ESA (European Space Agency) zal een experiment in een baan om de aarde uitvoeren dat bekend staat als ANALOG-1 om te zien of stationbemanningen, wetenschappers op de grond en nieuwe technologie kunnen samenwerken om een rover te begeleiden op een gesimuleerde maanmissie.
Dit project onderzoekt hoe effectief een astronaut op het internationale ruimtestation een rover kan besturen op een maanachtig terrein op aarde. De rover is belast met het verzamelen van gesteente- en grondmonsters, vervolgens op afstand de monsters onderzoeken.
"Dit is een potentieel wetenschappelijk scenario tijdens toekomstige missies naar de maan en Mars, " zei William Carey, ESA-wetenschapper en hoofdonderzoeker voor het ANALOG-1-experiment. "De ruimte is zo'n harde plek voor mensen en machines. Toekomstige verkenning van het zonnestelsel kan inhouden dat er robotverkenners worden gestuurd om de wateren op onbekende planeten te testen voordat ze mensen sturen."
Op afstand sluiten
ANALOG-1 is de laatste stap in ESA's lopende METERON-project (Multi-purpose End To End Robotics Operations Network), dat is een initiatief om robotica te ontwikkelen en te testen, communicatie- en operatie-innovaties die astronauten zouden kunnen gebruiken om het zonnestelsel te verkennen.
historisch, rovers die andere planeten verkennen, worden bestuurd met voorgeprogrammeerde software en door wetenschappers die commando's vanaf de aarde sturen die lange tijd nodig hebben om de robots te bereiken. Deze benaderingen werkten goed genoeg om onze kennis van andere werelden enorm te vergroten, maar ze kunnen het moeilijk maken om snel te werken, plannen wijzigen of zich snel aanpassen aan onverwachte situaties.
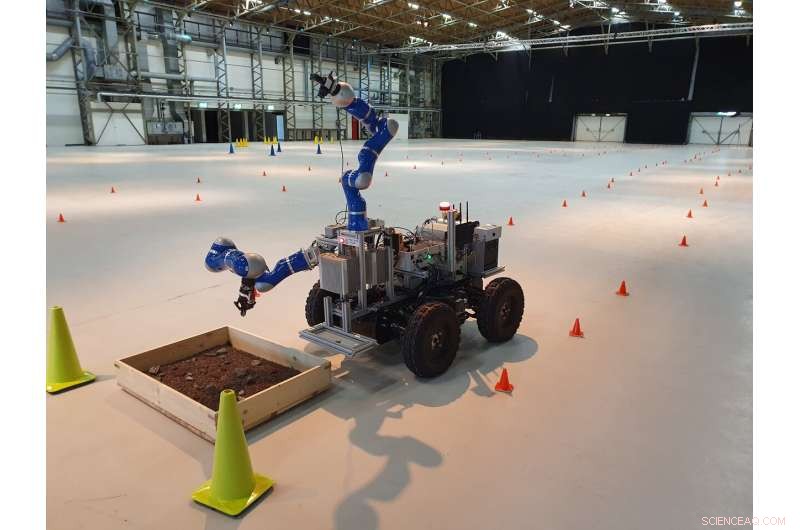
De ANALOG-1 Interact-rover in de buurt van het European Space Research and Technology Centre in Nederland wordt bestuurd door een surrogaat-astronaut in het European Astronaut Centre in Duitsland. De kegels markeren een route die de rover moet volgen om bij de monsterlocatie te komen. Krediet:ESA
Carey en zijn ESA-team vermoeden dat een betere methode is om astronauten in een baan rond verkenningslocaties te plaatsen waar ze snel met de rover kunnen communiceren. Met een nabije astronaut aan het stuur van de rover, wetenschappers zouden efficiënter een gepland doelwit kunnen verkennen, profiteer van een verrassingskans of beheer snel een probleem.
"Een aantal ruimteagentschappen hebben naar een dergelijk scenario gekeken voor de verkenning van planetaire lichamen - met name voor Mars, "zei Carey. "De aanpak zou het wetenschappelijke rendement van die missies aanzienlijk kunnen vergroten, en bieden ook een manier om mogelijke besmetting door mensen die op het oppervlak landen te voorkomen voordat we vragen over bestaand of vorig leven op Mars kunnen beantwoorden."
De resultaten van het experiment kunnen van bijzondere waarde zijn voor NASA terwijl het zich voorbereidt om de maan te verkennen vanuit het geplande Gateway-ruimteschip als onderdeel van het Artemis-programma, waar NASA vooruit zal gaan naar de maan en verder naar Mars.
Binnen handbereik
Tijdens het twee uur durende experiment ESA-astronaut Luca Parmitano zal een werkstation aan boord van het in een baan om de aarde draaiende laboratorium gebruiken om te proberen een op afstand bestuurbare rover en zijn arm te besturen terwijl deze een maanachtig oppervlak bij Noordwijk doorkruist, een stad in Nederland. Parmitano zal de robot besturen met behulp van een gespecialiseerd computersysteem en zal worden geleid door wetenschappers die op de grond met hem communiceren. Hij zal ook een ultramoderne Sigma 7 "joystick" gebruiken waarmee de astronaut kan voelen wat de arm van de rover tegenkomt.
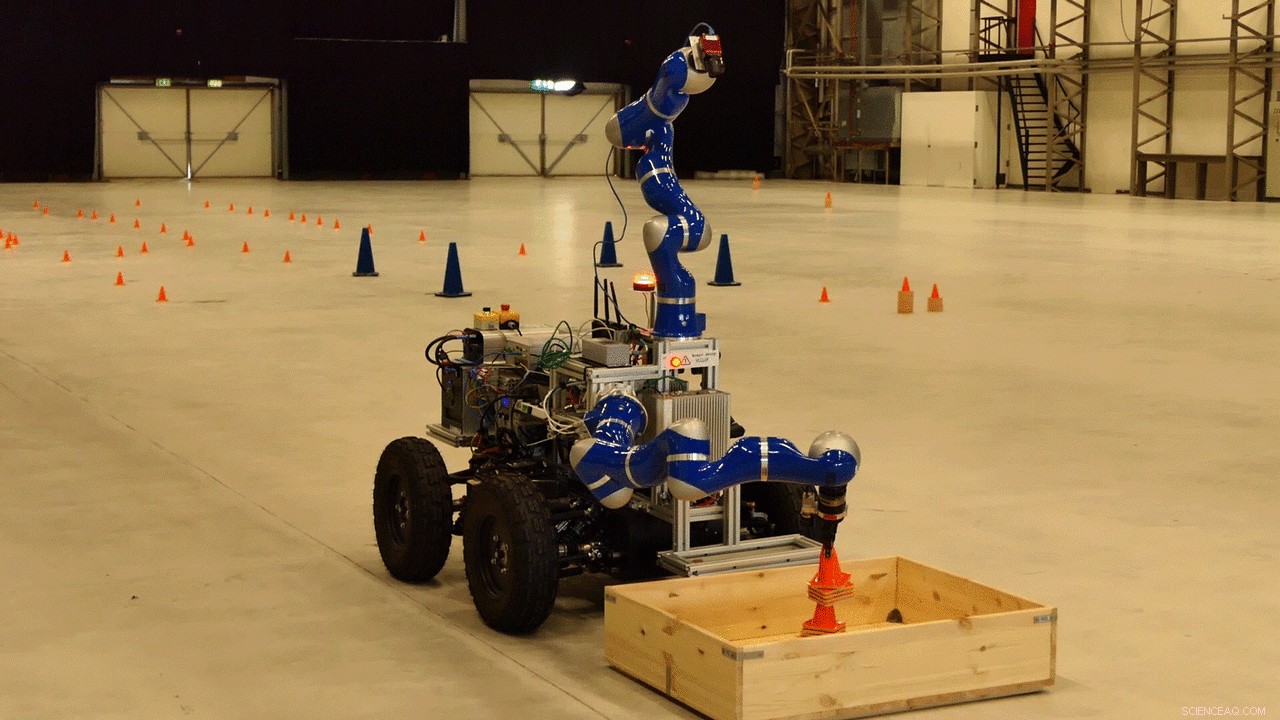
De rover die zal worden gebruikt als onderdeel van het ESA ANALOG-1-experiment, verplaatst kegels in de monsterdoos die tijdens het experiment stenen zal bevatten. Credits:ESA
"De force feedback stelt de operator in staat om te voelen wat de robot voelt, ", zegt Thomas Krueger, hoofdingenieur van ESA-robotica. "Bijvoorbeeld, als de robot een kwetsbaar object aanraakt, het meet en stuurt informatie terug naar de gebruiker, die vervolgens zijn delicatesse voelt op de Sigma 7-joystick. Ze kunnen de arm dan voorzichtiger bedienen dan met een normale joystick."
Parmitano zal de joystick gebruiken om de arm van de robot te sturen om monsters van gesteente en grond terug op aarde te nemen. Wetenschappers verwachten dat hij extra moeilijkheden kan ondervinden vanwege de manier waarop het menselijk lichaam op de ruimte reageert. Onderzoek heeft aangetoond dat microzwaartekracht de tastzin of het gevoel van een astronaut kan aantasten, evenals de mogelijkheid om bewegende objecten te volgen - die beide van cruciaal belang zijn in de taak van dit onderzoek.
De taak evalueren
Als het experiment klaar is, onderzoekers op de grond zullen evalueren hoe goed de robotbesturingssystemen functioneerden en het vermogen van Parmitano onderzoeken om de rover te besturen onder de effecten van microzwaartekracht. Ze zullen ook zien hoe goed Parmitano en het wetenschappelijke team op aarde konden communiceren om beslissingen te nemen en plannen te maken voor het besturen van de rover.
"Robots hebben de mogelijkheid om onze aanwezigheid op andere werelden uit te breiden en onze verkenningsefficiëntie te vergroten, "Zei ESA-projectmanager Kjetil Wormnes. "De resultaten van ANALOG-1 zullen ons helpen de meest effectieve manier te bepalen om met robots samen te werken om ons voor te bereiden op onze toekomstige verkenning van de maan."
 Hoe is polyurethaanschuim gemaakt?
Hoe is polyurethaanschuim gemaakt? - Onderzoekers kijken naar interactie tussen olie en water om waterverontreiniging te voorkomen
- Onderzoekers maken 's werelds snelste moleculaire shuttle
- Wat is het verschil tussen reagentia en producten in een chemische reactie?
- Een stap in de richting van het kwijtraken van kassabonnen van BPA
Hoofdlijnen
- Feiten over osmose voor kinderen
- Factoren die betrokken zijn bij celdifferentiatie
- Verschillen tussen een neuron en een neuroglia
- Sluwe kraaien weten wat er nodig is om een goed stuk gereedschap te maken
- De voordelen van het bestuderen van cellen onder een lichtmicroscoop
- De nadelen van Western Blotting
- Klop, klop! Wie is daar?
- Een klassieke darwinistische ecologische hypothese houdt stand - met een twist
- Een lijst met vijf kenmerken van chromosomen
- Anti-asteroïde Space Sentinel zou binnenkort de planetaire hemel kunnen patrouilleren

- Planetaire wetenschappers blijven puzzelen over de mysterieuze hellingen op Mars. Wat veroorzaakt ze?

- Afscheid van een schoonheid aan de nachtelijke hemel
- Mogelijke eerste waarneming van een exomoon
- NASA-satellietgegevens gebruiken om malaria-uitbraken te voorspellen


 De selectie van leiders van politieke partijen door middel van voorverkiezingen benadeelt vrouwen
De selectie van leiders van politieke partijen door middel van voorverkiezingen benadeelt vrouwen- NASA vindt post-tropische storm Betas-wolken die het zuidoosten van de VS bedekken
- Drie astronauten veilig aan boord van het internationale ruimtestation (update)
- De waarneming van Kardar-Parisi-Zhang hydrodynamica in een kwantummateriaal
- 5 mijlpalen die het internet hebben gecreëerd, 50 jaar na het eerste netwerkbericht
- Nadelige effecten van humanitaire voedselhulp betwist in nieuwe studie
- Snelle HIV-detectiemethode kan vroege ziekte diagnosticeren
- Biotische factoren van het regenwoud
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
