Wetenschap
Nieuw onderzoek onthult verborgen objecten in hoge resolutie
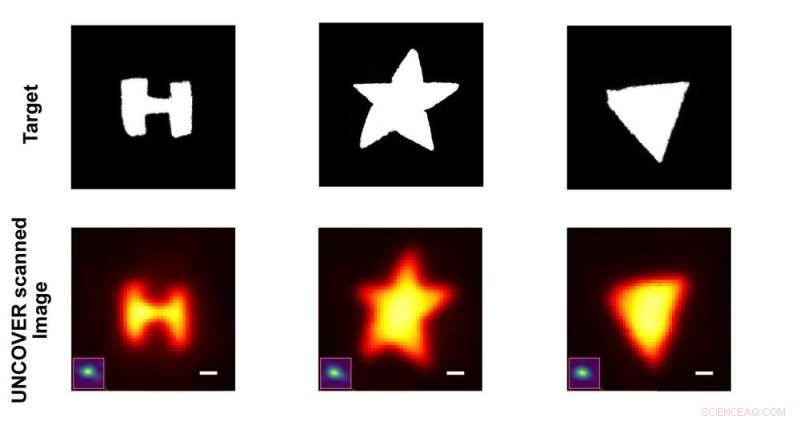
Doelobjecten en de afbeeldingen ervan gemaakt met UNCOVER NLOS-technologie. Krediet:Caltech
Stel je voor dat je na een lange werkdag naar huis rijdt. Plots rijdt een auto uit een verduisterde zijstraat en draait recht voor je uit. Gelukkig zag je autonome auto dit voertuig lang voordat het in je gezichtsveld kwam en vertraagde hij om een crash te voorkomen. Dit lijkt misschien magie, maar een nieuwe techniek die bij Caltech is ontwikkeld, zou het dichter bij de realiteit kunnen brengen.
Met de komst van autonome voertuigen, geavanceerde ruimtevaartuigen en andere technologieën die afhankelijk zijn van sensoren voor navigatie, is er een steeds grotere behoefte aan geavanceerde technologieën die kunnen scannen op obstakels, voetgangers of andere objecten. Maar wat als er iets verborgen is achter een ander object?
In een recent gepubliceerd artikel in het tijdschrift Nature Photonics , beschrijven Caltech-onderzoekers en hun collega's een nieuwe methode die nabijgelegen oppervlakken in wezen transformeert in lenzen die kunnen worden gebruikt om eerder verduisterde objecten indirect af te beelden.
De technologie, ontwikkeld in het laboratorium van Changhuei Yang, Thomas G. Myers, hoogleraar elektrotechniek, bio-engineering en medische technologie; en onderzoeker van het Heritage Medical Research Institute, is een vorm van non-line-of-sight (NLOS) sensing - of sensing die een interessant object detecteert buiten het gezichtsveld van de kijker. De nieuwe methode, UNCOVER genaamd, doet dit door nabijgelegen vlakke oppervlakken, zoals muren, als een lens te gebruiken om het verborgen object duidelijk te zien.
De meeste huidige NLOS-beeldvormingstechnologie detecteert licht van een verborgen object dat passief wordt gereflecteerd door een oppervlak zoals een muur. Omdat oppervlakken zoals muren echter overwegend licht verstrooien, leveren de technieken geen duidelijke beelden op. Computationele beeldvormingsmethoden kunnen worden gebruikt om informatie uit het verstrooide licht te halen en de beeldhelderheid te verbeteren, maar ze kunnen geen afbeeldingen met een hoge resolutie genereren.
UNCOVER gaat echter direct verstrooiing tegen door het gebruik van golffrontvormende technologie. Wavefront-vormgeving was voorheen niet haalbaar omdat hiervoor een guidestar nodig was, een geschatte puntlichtbron waarmee details van het verborgen object kunnen worden afgeleid.
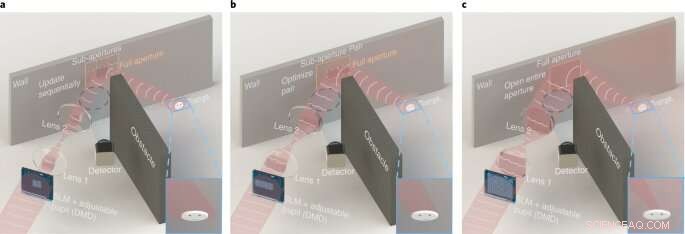
Concept van de systeemopstelling. Krediet:Natuurfotonica (2022). DOI:10.1038/s41566-022-01009-8
"We weten dat lenzen een punt op een ander punt afbeelden. Als je door een slechte 'lens' met matte oppervlakken kijkt, is het beeld van een punt nu wazig en verspreidt het licht zich over de hele plaats, maar je kunt slijpen en polijsten het matte oppervlak om het licht naar de juiste positie te sturen", legt student elektrotechniek Ruizhi Cao uit, de eerste auteur van Nature Photonics papier. "Zo helpt een guidestar je in principe:hij vertelt ons waar de kleine oneffenheden zitten, zodat we weten hoe we het oppervlak correct moeten polijsten."
Yang en zijn collega's ontdekten dat het verborgen object zelf als gidsster kon worden gebruikt. Het resultaat is een NLOS-beeldvormingsmethode die het verstrooide licht weer samenvoegt tot een helder beeld van het verborgen object.
Volgens Cao kan de beeldvormingsmethode nuttig zijn voor autonoom rijden, reddingsmissies en andere remote-sensing-gerelateerde missies. In het geval van autonoom rijden zegt Cao:"Met deze methode kunnen we al het verkeer op het kruispunt zien. Dit kan de auto's helpen om het potentiële gevaar te voorzien dat men niet direct kan zien."
Door het gebruik van UNCOVER kunnen auto's net zo goed zien als mensen, maar kunnen mensen ook betere bestuurders worden. Terwijl een menselijke bestuurder een opkomende jaywalker op een paar meter afstand kan zien, kan een autonome auto die is uitgerust met UNCOVER-technologie een dergelijk geval mogelijk in het volgende blok zien, op voorwaarde dat de beeldomstandigheden optimaal zijn.
UNCOVER-beeldvorming zou ook buiten de aarde nuttig kunnen zijn, bijvoorbeeld in toekomstige robotmissies om Mars te verkennen, zegt Cao:"We rekenen erop dat de rovers foto's maken van een andere planeet om ons te helpen een beter begrip van die planeet te ontwikkelen. die rovers, sommige plaatsen zijn misschien moeilijk te bereiken vanwege de beperkte middelen en kracht. Met de niet-line-of-sight beeldvormingstechniek hebben we de rover zelf niet nodig om dat te doen. Wat nodig is, is een plek vinden waar het licht kan bereiken."
De Natuurfotonica paper is getiteld "High-resolution non-line-of-sight imaging met actieve focus." Andere co-auteurs zijn Frederic de Goumoens, Baptiste Blochet en Jian Xu. + Verder verkennen
Nieuwe beeldvormingsmethode onthult verborgen objecten
 Doorbraak bereikt bij het verbeteren van de ionische geleidbaarheid van brandstofcelmaterialen
Doorbraak bereikt bij het verbeteren van de ionische geleidbaarheid van brandstofcelmaterialen- Chemici ontdekken onverwachte enzymstructuur
- Big data en synthetische chemie kunnen klimaatverandering en vervuiling tegengaan
- Diagnostisch platform kan zich uitbreiden tot het detecteren van biomarkers voor ziekten
- Van planten afgeleide vluchtige stoffen kunnen dienen als toekomstige antischimmelmiddelen
- Vijf basiskenmerken van vis
- EPA keert koers over veiligheid van pesticiden die op gewassen worden gebruikt
- Wat gebeurt er wanneer iets in een voedselketen uitsterft?
- Hoe komt stikstof ons lichaam binnen?
- Plastic maakt deel uit van de koolstofkringloop en moet worden meegenomen in klimaatberekeningen
Hoofdlijnen
- Gebruik je echt maar 10 procent van je hersenen?
- Hoe beschadigt UV-licht de DNA-streng?
- Wat zijn endorfines?
- De genetische handtekening van de zeeschelp lezen
- Uit onderzoek blijkt dat wassen effectief lood verwijdert uit groenten die in stedelijke grond worden verbouwd
- Onderzoek identificeert een nieuw mechanisme dat betrokken is bij de voortplantingsfunctie
- Bij voetbalsucces draait alles om vaardigheid:studeren
- Grootte van witrotschimmels verklaard door de breedte van de betrokken genfamilies
- Politieke instabiliteit en zwak bestuur leiden tot verlies van soorten, studie vondsten
- Ammonia gebruiken om perovskietfilm te genezen voor de constructie van zonnepanelen

- Onderbenutte slimme apparaten aan het werk zetten

- Vodafone bezegelt fusie om India's grootste telecomgroep te worden

- IBM:Als AI-beslissing nader moet worden bekeken, blijf wakker, en hier is hoe

- Facebook-CEO Mark Zuckerberg heeft een boodschap voor je:het kan hem niet schelen of je hem leuk vindt


 Sterren vormen in het vroege heelal
Sterren vormen in het vroege heelal- De meest voorkomende organische moleculen in cellen
- Een wereld die verdrinkt in plasticvervuiling
- Wat gebeurt er als een land verdrinkt?
- Wetenschapsexperimenten over pH-niveaus
- Kaliumjacht op eiwitfabrieken
- Warmer noordpoolgebied schaadt gewassen in VS, Canada:studeren
- Antenne van zijdemotten inspireert nieuwe nanotech-tool met toepassingen in onderzoek naar Alzheimer
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
