Wetenschap
Een flexibele, door een staaf aangedreven zachte robot voor biomedische toepassingen
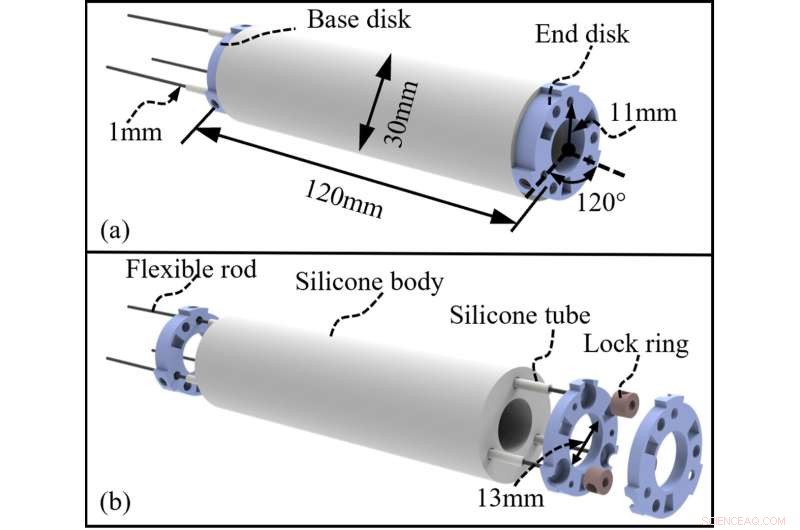
Structuur van de door een stang aangedreven zachte arm. (a) Ontwerpoverzicht. (b) Explosietekening. Krediet:Wang et al.
Zachte robots die taken met hoge efficiëntie, nauwkeurigheid en precisie kunnen voltooien, kunnen tal van waardevolle toepassingen hebben. Ze kunnen bijvoorbeeld worden geïntroduceerd in medische instellingen, artsen helpen bij het uitvoeren van complexe chirurgische procedures of oudere en kwetsbare patiënten helpen tijdens revalidatie.
Zachte robots zijn flexibeler en kunnen meer vervormen. Dit kan resulteren in een verhoogde behendigheid (d.w.z. betere handmatige vaardigheden bij het voltooien van taken), evenals in een vermindering van het laadvermogen (d.w.z. het robotvermogen om een last te dragen), omdat ze kleinere krachten kunnen produceren dan starre robotsystemen. P>
Onderzoekers van de National University of Singapore en Beijing Jiaotong University hebben onlangs een nieuwe staaf-aangedreven zachte robot (RDSR) ontwikkeld die werkt door middel van duw- en trekbewegingen. Deze robot, gepresenteerd in een paper gepubliceerd in de IEEE Robotics and Automation Letters , combineert de mechanismen van twee robotsystemen die eerder zijn gemaakt door leden van de onderzoeksgroep.
"Een goed uitgebalanceerde prestatie in termen van behendigheid, nauwkeurigheid en laadvermogen zou een groot potentieel kunnen hebben in zachte robottoepassingen", vertelde Cecilia Laschi, een van de onderzoekers die het onderzoek uitvoerde, aan TechXplore. "Veel studies richten zich op dit gebied en een paar werken en eerdere prestaties hebben ons geïnspireerd. In een baanbrekend onderzoek gepubliceerd in Materials Science and Engineering hebben we bijvoorbeeld een zachte robot ontwikkeld die is geïnspireerd op de octopus, aangedreven door longitudinale en transversale pezen, op dezelfde manier naar de spieren van de octopus."
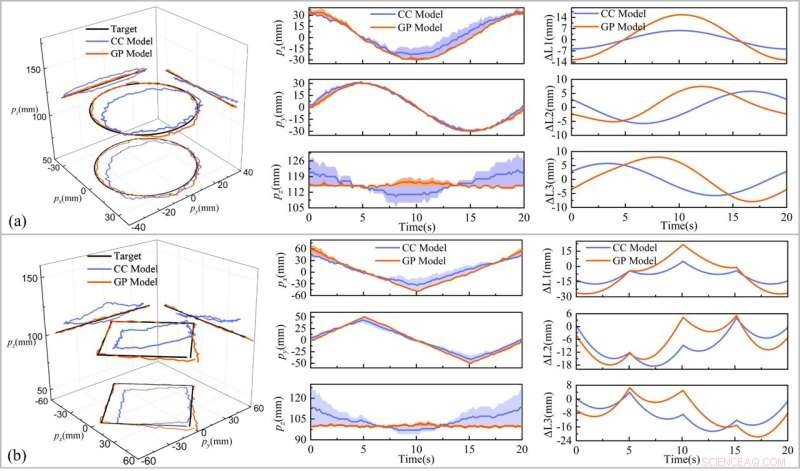
Trajectvolgprestaties van de open-lusbesturing op basis van CC- en GP-model. (a) Geval voor cirkelvormig pad. (b) Geval voor vierkant pad. Krediet:Wang et al.
De vorige robot, gemaakt door Laschi en haar collega's van het BioRobotics Institute of Scuola Superiore Sant'Anna in Italië, kan de manier waarop een octopus beweegt nabootsen door zijn tentakels te verlengen, in te korten en te buigen. Hun nieuw ontwikkelde systeem zou bijzonder veelbelovend kunnen zijn voor het voltooien van missies in besloten ruimtes, zoals schoonmaken of verkenningen, toegang krijgen tot diepe holtes en ingrijpen in het menselijk lichaam.
"De tweede studie die ons recente werk inspireerde, was de ontwikkeling door mijn onderzoeksteam van een continuümrobot op basis van push-pull flexibele staven", legt Peiyi Wang, een andere onderzoeker die bij het onderzoek betrokken was, uit. "Door het pure zachte lichaam van ons op een octopus geïnspireerde systeem te combineren met de staafaangedreven arm van Wang's robot, streeft onze nieuwe robot naar een uitgebalanceerde prestatie op het gebied van bewegingsnauwkeurigheid, werkruimte, DOF, stijfheid en actieve uitvoerkracht."
De nieuwe robot gemaakt door Laschi, Wang en hun collega's bestaat uit een zachte siliconen body, een stijve basis, eindschijven en drie siliconen buizen die elk een flexibele op Nitinol (NiTi) gebaseerde staaf bevatten. Het siliconenlichaam, dat tussen de basis en de eindschijf is geïntegreerd, is erg zacht en flexibel, waardoor het gemakkelijk kan worden verlengd, ingekort en gebogen.
"Elk van de flexibele staven van ons systeem kan worden bestuurd in zowel duw- als trekrichtingen, wat anders is dan pezen met alleen trekkende actie," zei Wang. "De door een staaf aangedreven zachte robot (RDSR) kan vervolgens meerdere bewegingen in alle richtingen (meerdere DOF's) realiseren door middel van gecoördineerde besturing van drie duw-trekstangen."
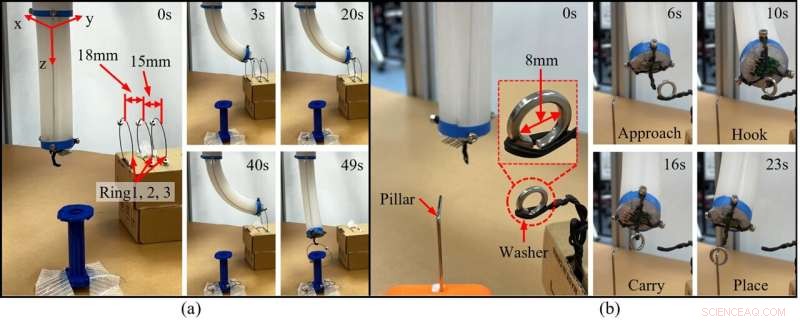
Objectmanipulaties uitgevoerd door onze zachte robot. RDSR voltooide pick-and-place-taken met een nauwkeurige bediening van de grote werkruimte. (a) De objecten werden nabij de grens van de werkruimte geplaatst (taak 1). (b) Er werd een object met een kleine diameter van 8 mm geplaatst (taak 2). Krediet:Wang et al.
De onderzoekers evalueerden hun RDSR in een reeks tests, waarbij ze de prestaties vergeleken met die van een op siliconen gebaseerde peesaangedreven zachte robot (TDSR). Ze ontdekten dat hun nieuwe robotsysteem stijver was en binnen een bredere werkruimte kon werken (van 2,6 tot 5,2 keer groter).
In tegenstelling tot de TDSR vergeleken ze het ook, hun robot kon actief loodrechte krachten uitoefenen op een hellend vlak en kon ook taken uitvoeren waarbij objectmanipulatie betrokken was. Gecombineerd suggereren al deze bevindingen dat de nieuwe robot effectiever zou kunnen zijn bij het uitvoeren van taken waarbij objecten worden opgepikt en in grotere ruimtes worden geplaatst en met een hoge mate van precisie.
"De beweging die wordt verkregen met bidirectionele push-pull-activering is origineel," zei Laschi. "Het geeft de zachte robot een nauwkeurigere controle. Een opmerkelijke implicatie van ons werk is het potentieel om evenwichtige prestaties mogelijk te maken in termen van behendigheid, nauwkeurigheid en laadvermogen."
In de toekomst kan het nieuwe RDSR-systeem dat door dit team van onderzoekers is gemaakt, helpen om complexe taken efficiënter en betrouwbaarder aan te pakken, waardoor een hogere mate van precisie wordt bereikt. In hun volgende onderzoek willen Laschi en haar collega's de effectiviteit van de robots testen voor biomedische toepassingen, waaronder chirurgie, revalidatie en ouderenzorg.
"We zijn ook van plan om de zachte arm die we hebben gemaakt te verbeteren op andere aspecten die niet strikt verband houden met het ontwerp en de mechanica, maar met de controle van de bewegingen", voegde Laschi eraan toe. "Het toevoegen en modelleren van gedistribueerde proprioceptie, d.w.z. de perceptie van de eigen houding van de arm, is een uitdaging om aan te pakken, evenals een robuust detectiesysteem voor het detecteren van contactkrachten." + Verder verkennen
Configuratie en manipulatie van zachte robotica voor onderhoud in de baan
© 2022 Science X Network
 Helft van de kersenbloesems in Washington dood na koudegolf
Helft van de kersenbloesems in Washington dood na koudegolf- Canada moet zijn CO2-belasting verdubbelen om de emissiedoelstelling te halen:rapport
- NASA-satelliet gevonden Post-Tropical Storm Alpha fizz over Portugal en Spanje
- Wetenschappers detecteren aardbevingszwerm bij vulkaan Hawaï
- 7 Classificaties van Earthworms
Hoofdlijnen
- Wat is het belang van virtual reality voor artsen en chirurgen?
- Hoe de hormonen van de hypofyse te onthouden
- Correct gebruikte neonaten hebben geen nadelige invloed op bijenvolken, nieuwe onderzoeksresultaten
- Geautomatiseerde biologie, of hoe je een populatie cellen kunt besturen met een computer
- Wat levert glycolyse op?
- Nieuw raamwerk om microbiële interacties af te leiden
- Aanwijzingen voor de aangeboren resistentie tegen geneesmiddelen van een cacaofermenterende ziekteverwekker
- Nieuw onderzoek onthult de enige tuimelaars in Engeland
- Wetenschappers controleren cellen met licht,
- China's Huawei tekent deal om 5G in Rusland te ontwikkelen

- Walmart, Microsoft werkt samen om Amazon te verslaan

- Het verhogen van de vermogensinstelling kan sommigen helpen die protheses gebruiken
- Schuine elektrostatische injecteerbare titaniumoxidefilm leidt tot efficiënte perovskiet-zonnecellen
- in opknapbeurt, Facebook zet in op kleinschalige verbindingen, romantiek


 Lessen uit natuurlijke fotosynthese voor omzetting van CO2 naar grondstoffen voor plastic
Lessen uit natuurlijke fotosynthese voor omzetting van CO2 naar grondstoffen voor plastic- Het geheim van het volgen van dodelijke infecties? Het kan Mosquito Pee
- India verwelkt als de temperatuur 50 graden Celsius bereikt
- Air Canada neemt 16 opnieuw in dienst, 500 werknemers ontslagen vanwege pandemie
- Hamming berekenen Distance
- Smartphonemarkt blijft dit jaar koel:voorspelling
- Achter die krantenkoppen:geloof niet dat claims robots de helft van onze banen bedreigen
- Een nieuwe strategie om onvolkomenheden in bezettingsrasterkaarten te corrigeren
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
