Wetenschap
Modelleren en simuleren van complexe dynamische musculoskeletale architecturen
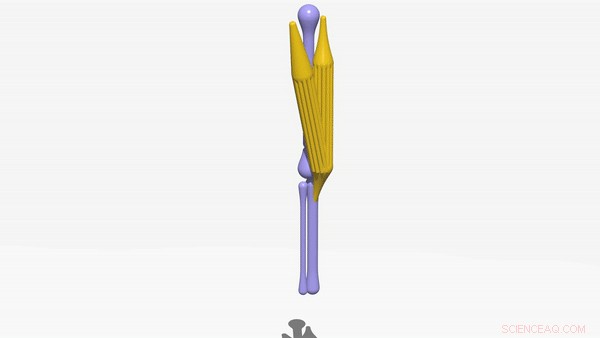
Simulatieresultaat van een ellebooggewricht dat isokinetische gewrichtsflexie uitvoert. opperarmbeen, ulna en radius zijn gemodelleerd met stijve filamenten in paars. Pezen zijn gemodelleerd met taps toelopende filamenten in geel. Twee bicepskoppen bestaande uit 36 filamenten voeren maximale vrijwillige samentrekking uit. Er worden randvoorwaarden toegepast om een constante hoeksnelheid te garanderen. Krediet:Natuurcommunicatie, doi:10.1038/s41467-019-12759-5
Levenswetenschappers en bio-ingenieurs bestuderen natuurlijke systemen en organismen om hun biofysische mechanismen te begrijpen, om biomimetische technische toepassingen in het laboratorium te stimuleren. In een recent rapport over Natuurcommunicatie , Xiaotian Zhang en collega's van de afdelingen Werktuigbouwkunde en Supercomputing-toepassingen in de VS presenteerden een numerieke benadering om musculoskeletale architecturen te simuleren. De methode was gebaseerd op de assemblage van heterogene actieve en passieve Cosserat-staven (een vervormbare gerichte staafgebaseerde curve) in dynamische structuren om botten te modelleren, pezen, banden, vezels en spierconnectiviteit. Ze demonstreerden toepassingen van de techniek door een reeks problemen op te lossen in biologische en zachte robotscenario's in vele omgevingen en schalen. Het team ontwikkelde biohybride robots op millimeterschaal en reconstrueerde complexe musculoskeletale systemen. De methode is veelzijdig en biedt een raamwerk om voorwaartse en achterwaartse bio-engineeringontwerpen te ondersteunen voor fundamentele ontdekkingen over de functies van levende organismen.
Musculoskeletale systemen bevatten botten, spieren, pezen en ligamenten om samen te functioneren in inheemse biologische systemen. Intrigerend, dergelijke architecturen bevatten een onlosmakelijk verband tussen bediening en controle, topologie en mechanica als gevolg van niet-lineaire bestanddelen. In schril contrast met robots met een star lichaam, zachte biologische wezens kunnen vervormingen en structurele instabiliteiten doorvoeren om te functioneren binnen complexe, ongestructureerde en dynamische omgevingen. Biologische musculoskeletale architecturen hebben een intrinsieke verdeeldheid, zachtheid en naleving om controletaken uit te besteden aan verschillende compartimenten. Deze eigenschap vormt de basis voor een opkomend paradigma in biologisch geïnspireerde robotica, bekend als morfologische berekening of mechanische intelligentie. De overwegingen hebben geleid tot een verscheidenheid aan experimentele vooruitgang in zachte robotica met kunstmatige volgzame materialen om zachte biohybride robots te vormen. Ondanks experimentele vooruitgang in het veld, inspanningen om dynamische musculoskeletale architecturen over biologische en synthetische structuren te modelleren en te simuleren, moeten nog worden bereikt.
Het menselijk ellebooggewricht simuleren
Zhang et al. demonstreerde voor het eerst een methode om volledige dynamiek van vervorming op te nemen, zoals buigen, twist, afschuiving en rek betrokken bij biologische architecturen. Voor deze, ze bouwden voort op eerder werk aan cosserat-staven om een musculoskeletale modelleringsbenadering vast te stellen om op realistische wijze actieve, heterogene biologische lay-outs in een stapsgewijze benadering voor het synthetiseren en repliceren van levende architecturen met biologische lagen van complexiteit voor geavanceerde biomimetische toepassingen. Het werk stelde hen in staat biologische systemen te repliceren door de onderliggende biomechanica na te bootsen en gaf toegang tot het bestuderen en begrijpen van biofysische functies van biologische organismen in silicium. De studie toonde aan dat de toepassingen van staafmodellen een waardevolle rol spelen bij het modelleren van complexe actieve systemen voor biomimetische architecturen.
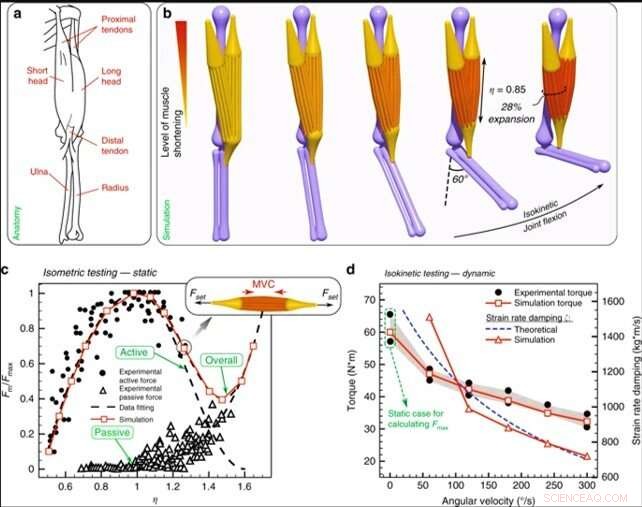
Menselijke elleboog bediening. (a) Ellebooganatomie. (b) Simulatie van een elleboog bestaande uit drie botten (humerus, ellepijp en radius) en twee bicepskoppen (korte en lange kop) die een volledige flexie uitvoeren. (c) Experimentele gegevens en simulaties voor actieve en passieve kracht genormaliseerd met piekkracht (Fm/Fmax) tijdens de isometrische oefening (Fset bootst de weerstand na die door de spier wordt ondervonden en resulteert in zijn evenwichtslengte η). (d) Experimentele en simulatietorsiemetingen van het ellebooggewricht (onder een hoek van 60 °) die maximale isokinetische concentrische flexies uitvoeren bij verschillende hoeksnelheden, samen met de overeenkomstige algehele demping van de spierspanningssnelheid ζ. De numeriek bepaalde ζ worden vervolgens vergeleken met theoretische schattingen op basis van het Hill-model. Krediet:Natuurcommunicatie, doi:10.1038/s41467-019-12759-5
Tijdens de eerste biomimetische simulatie, Zhang et al. gebruikte een menselijk ellebooggewricht met spieren, pezen en botten om staafassemblages te illustreren die zijn toegewezen aan fysiologie, dynamiek en morfologie. Bijvoorbeeld, het ellebooggewricht vertoonde zachte en stijve kenmerken, vereenvoudigde dynamiek en verminderde configuratieruimte. Dankzij de analyse konden ze het model verifiëren en kalibreren op basis van gemakkelijk beschikbare anatomische en biomechanische gegevens om verband te houden met het Hill-model. Het detailniveau van de representatie stelde hen in staat om menselijke patiëntspecifieke kinesiologische behoeften aan te pakken en virtueel een 3D-replica van een menselijk ellebooggewricht te reconstrueren met behulp van isometrische en isokinetische tests die toepasbaar zijn voor botweefselmanipulatie. De wetenschappers zouden kunnen modelleren, kalibreren en valideren van de activering van een individuele spiereenheid, waarbij het resultaat de dynamiek en morfologie van een biologisch systeem weergeeft. De huidige modelleringsbenadering presenteerde belangrijke kenmerken die het onderscheidt van het Hill-model, om (a) individuele staven voor selectieve rekrutering op te nemen om een blessure na te bootsen, en (b) meegevende spieren die kunnen buigen, draai en schuif realistisch op dynamische krachten over de hele constructie of in de omgeving.
Engineering van biohybride robots
In het volgende experiment, het team ontwikkelde biohybride robots met behulp van hun computationele oplosser om het ontwerp en de fabricage van zwemmende en wandelende biohybride bots op millimeterschaal te begeleiden. Om het zwemgedrag van de robots te onderzoeken, ze losten eerst problemen op met behulp van numerieke modellering en simulaties van een eerder vastgestelde biohybride flagella. Voor deze, ze creëerden een exacte replica van de originele zwemmer en modelleerden het polydimethylsiloxaan (PDMS) -substraat om experimentele geometrie en materiaaleigenschappen na te bootsen met levende geclusterde cellen gemodelleerd als een kleine, zacht en samentrekkend filament verbonden met het substraat. De kwalitatieve en kwantitatieve waarnemingen van zwembewegingen tussen de simulatie en het experiment kwamen goed overeen.
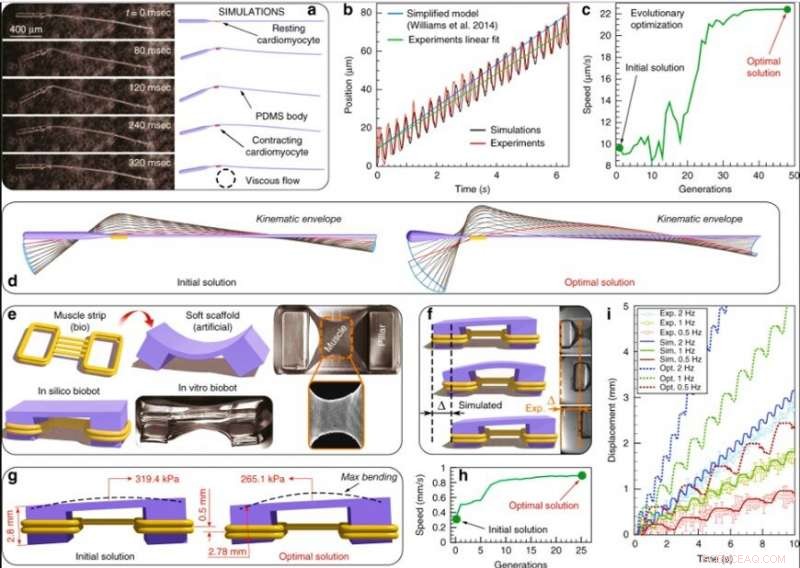
Biohybride robotontwerp. (a) Een-op-een vergelijking van de robot met experimentele foto's in verschillende stadia binnen één zwemcyclus. (b) Axiale positie van het centrum van de robot, gevolgd over meer dan 20 cycli in vergelijking met experimentele gegevens. (c) Optimalisatietraject:convergentie naar optimale oplossing wordt waargenomen na 48 generaties. Optimalisatie was beperkt met hoofdlengte binnen [0, 1.927]mm, hoofdradius binnen [4, 40]μm, staartradius binnen [4, 6.5]μm en cellocatie op elk punt langs de staart. De lengtemaat van de bot is vastgesteld op L =1.927 mm, zodat de staartlengte kan worden afgeleid uit de koplengte. De parameterbereiken worden bepaald om rekening te houden met de werkelijke produceerbaarheid. (d) Visualisatie van zowel de originele als de optimale ontwerpen die configuraties in rust en kinematische enveloppen op de middellijn gedurende één periode tonen. Originele details van de zwemmer:het substraat is gemodelleerd met een kop van 424 m lang en een staart van 1503 m met een straal van respectievelijk 20 m en 7 m. Dichtheid ρ=0.965gcm−3, Young's modulus E =3,86 MPa, buigstijfheid EI=2.427×10−9Nmm2, massa m=7.364×10−7g zijn ingesteld. De contractiele cel wordt gemodelleerd met een straal van 10 m en een lengte van 100 m. De cel is ingesteld om een samentrekkende kracht F=σmA=12μN te produceren met een slagfrequentie f=3,6Hz23. De vloeistof heeft een dynamische viscositeit μ=1,2×10−3Pa⋅s. Geoptimaliseerde zwemmersdetails:substraat heeft een lengte en straal van 190 m en 32,3 m, respectievelijk. De contractiele cel is op 190 m van de kop bevestigd en de staart is 4,3 m dik. (e) Algehele ontwerp van de rollator met gele elementen die spierringen voorstellen en paarse elementen die het skelet vertegenwoordigen. Experimentele afbeeldingen aangepast van eerdere studies. (f) Simulaties versus experimenten:Botverplaatsing gedurende 2 seconden voor de activeringsfrequentie 1 Hz. (g) Visualisatie van het initiële en geoptimaliseerde ontwerp van de rollator. (h) Optimalisatietraject convergeert na 25 generaties. Optimalisatie werd beperkt met de Young's modulus van het skelet [250-350] kPa, lengte van de kortere pilaar [2,4–3,4] mm en locatie van de spierstrook [0,5–3] mm (afstand van de grond), die allemaal zijn gekozen op basis van produceerbaarheidsbeperkingen. (i) Dynamisch gedrag van gesimuleerde (ononderbroken lijnen) en experimentele (markeringen met foutbalken) rollator met spiercontractie op verschillende frequenties, en vergelijking van loopprestaties tussen aanvankelijk (ononderbroken lijnen) en verder geoptimaliseerd ontwerp (stippellijnen). Krediet:Natuurcommunicatie, doi:10.1038/s41467-019-12759-5
Na het modelleren en optimaliseren van de biohybride zwemmer, ze probeerden een biohybride rollator te ontwerpen zoals eerder ontwikkeld om de snelste beweeglijke biologische machine tot nu toe te vormen door Pagan-Diaz et al., gebaseerd op een eerdere biohybride robot. structureel, het Pagan-Diaz-model bevatte een asymmetrische hydrogel-steiger en skeletspierweefsels om in vivo op spier-pees-botrelaties te lijken en werkte in een oplossingsbad in het laboratorium. Experimenteel, ze schorten de spieren op en schokten ze elektrisch om contractie voor beweging op te wekken via asymmetrie en wrijving.
Zhang et al. simuleerde deze architectuur in het huidige werk, om een nieuwe scaffold en topologische spierarrangementen van de bot te ontwerpen. De nieuwe spierweefseltopologie bevatte een dunne strooksectie die twee ringen verbond die om skeletpoten waren gewikkeld om spiercontractiekrachten over te dragen, die ze hebben getest met behulp van benchmarkstudies. Zhang et al. experimenteel de berekeningsblauwdruk gedemonstreerd met het Pagan-Diaz-model om een nieuwe bio-bot te bouwen met tweemaal de snelheid van de originele bio-hybride robot; met goede overeenstemming waargenomen in de simulatie. Het onderzoeksteam toonde het potentieel van de computationele benadering om de fysica van cel- en spieraangedreven zachte robotsystemen in te kapselen voor de gewenste toepassingen om flexibelere prototypen te ontwikkelen.

Glijdende beweging van het musculoskeletale slangenmodel met vier spiergroepen. De opstelling van de spiergroepen is geoptimaliseerd voor de snelste voorwaartse snelheid. De kleur van de spiergroepen geeft het niveau van spiercontractie aan. Krediet:Natuurcommunicatie, doi:10.1038/s41467-019-12759-5.
Engineering glibberende slangen
Het team gebruikte vervolgens de numerieke benadering die in het onderzoek was bedacht om de produceerbaarheid van biohybride robots te vergemakkelijken en de biomechanica te begrijpen. Bio-ingenieurs hadden eerder meerdere experimenten uitgevoerd op de voortbeweging van slangen om replica's van doelrobots te bouwen met behulp van servomotoren (roterende actuatoren). In het huidige experiment is ze ontwikkelden een volledig zachte elastische slang, bio-geïnspireerd door echte slangen, maar effectief geactiveerd met verschillende spierpeesgroepen om soepele golvende bewegingen te bereiken. Het onderzoeksteam toonde aan dat, hoewel biologische slangen meerdere spieren hadden om gangen en lichaamsvervormingen te orkestreren, het model had maar een paar functies nodig om soepel en effectief naar voren te glijden.
Voor een optimaal ontwerp, de wetenschappers koppelden hun computationele oplosser aan het Covariance Matrix Adaptation-Evolution Strategy-algoritme (CMA-ES) om de locaties en activeringspatronen voor maximale snelheid vooruit te identificeren. Zhang et al. vergeleken en geverifieerd met referentiesimulaties en experimentele opnames. Het team was vooral gericht op het onthullen van verborgen architecturale ontwerpprincipes en het blootleggen van hun functie voor technische doeleinden. Ze hebben zorgvuldig gedistribueerde bediening georkestreerd voor soepele, realistische gangen in schril contrast met de starre tegenhangers van slangenrobots. De onderzoekers implementeerden ook een raamwerk om te vereenvoudigen, test en gebruik biomechanische principes van complexe biologische systemen om een realistisch glijdend, snel, zacht-robotachtige slang op basis van een paar eenvoudige actuatoren.
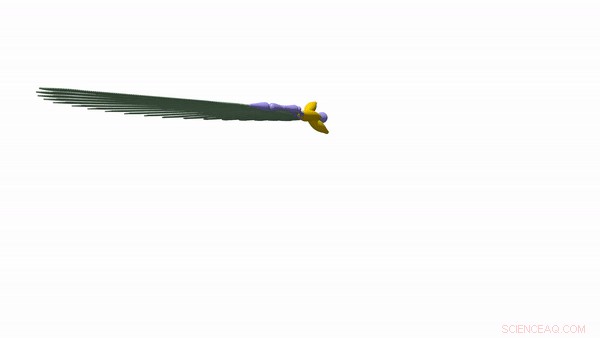
Het vooraanzicht van een paar vleugels bestaande uit 6342 filamenten, waar groene filamenten de veren aangeven. Een initiatieproces heft de vleugels vanuit een vlakke positie op en wordt gevolgd door een enkele neerwaartse en opwaartse slag tijdens de startfase. Krediet:Natuurcommunicatie, doi:10.1038/s41467-019-12759-5.
Engineering gevederde vleugels
Om een meer complexe strategie van voortbeweging te demonstreren die extra biologische structuren met kritieke functies omvat, het team ontwikkelde een gevederde, musculoskeletale vogelvleugel in silico. Bio-ingenieurs hadden eerder een verscheidenheid aan onderzoeken uitgevoerd om de biofysische kenmerken van vogelvlucht te begrijpen, van spieractiveringspatronen tot biomechanica van veren. In het huidige werk, Zhang et al. beschouwde de dynamische vleugelstructuur van een duif en reconstrueerde de veren in silico met buigstijfheid, consistent met eerdere studies.
In totaal, ze verbonden 19 veren met het computationele vleugelmodel dat overeenkwam met de biologische gegevens van de postduif. Ze omvatten vier spieren die verband houden met de schouder- en ellebooggewrichten om de vleugelbediening en morphing te regelen ten opzichte van het menselijke ellebooggewrichtmodel. Hoewel dit model als eerste in studie geen complexe aerodynamica vastlegde die verband houdt met fladderende vluchten, het leverde een voorlopige schatting op. Het team reproduceerde de kinematica van morphing-vleugels tijdens het opstijgen en baseerde de spieractiveringspatronen op eerder verworven experimenteel geregistreerde elektromyografie (EMG) signalen.
Op deze manier, Xiaotian Zhang en een team van onderzoekers presenteerden een nieuwe methode om heterogene, actieve en passieve cosseratstaven om dynamische, musculoskeletale architecturen die vervorming kunnen ondergaan om biomimetische beweging te vergemakkelijken. De aanpak richtte zich op een bestaand gebrek aan technische technieken in zachte robotica om de kloof tussen rigide-lichaammodellering en high-fidelity eindige-elementenmethode (FEM) -simulaties te vullen.
Door gebruik te maken van gunstige eigenschappen die in het onderzoek zijn ontwikkeld, het onderzoeksteam ontwikkelde soft-bodied systemen om een aantal problemen op te lossen met betrekking tot zachte robotica en complexe biologische structuren in diverse omgevingen. Het nieuwe werk toonde de veelzijdigheid van de aanpak om een veelbelovende strategie vast te stellen voor brede toepassingen in bio-engineering, biologisch geïnspireerde structuren om de onderliggende kenmerken van levende organismen te ontdekken.
© 2019 Wetenschap X Netwerk
 Interdisciplinair team ontwerpt gasstroomcel om katalytisch gedrag te analyseren
Interdisciplinair team ontwerpt gasstroomcel om katalytisch gedrag te analyseren- Tetraëders kunnen de uniciteit van wateren verklaren
- Blootstelling aan cyanide detecteren
- Hoe de door de calorimeter verkregen warmte te berekenen
- Nieuwe biochemische verbinding kan milieuverontreinigende stoffen afbreken
Hoofdlijnen
- Wat irriteert een chimpansee?
- Een menselijk hart maken van pop-flessen
- Structuur van primaire optogenetische tool onthuld
- Waarom lopen mensen meestal in dezelfde richting?
- "How Do Plant Cells Grow?
- Energiestroom (ecosysteem): definitie, proces en voorbeelden (met diagram)
- Nieuwe studies zijn bedoeld om sociaalwetenschappelijke methoden in natuurbehoudonderzoek te stimuleren
- Een bijtend rapport:onderzoek toont aan dat klimaatverandering een grote bedreiging vormt voor hommels
- Is Rust Dust schadelijk?
- Google Doodle eert degenen in de frontlinie:supermarktmedewerkers

- Probleem met implementatie van Bluetooth naar voren gebracht door team dat tracking verkent

- Groene financiering bloeit nu beleggers verder kijken dan winst

- De hybride val

- Apple verkoopt een nieuwe batterijbehuizing voor zijn nieuwste iPhones ... voor $ 129


 Economische zwaargewicht Boeing geplaagd door dubbele crises
Economische zwaargewicht Boeing geplaagd door dubbele crises- Vakbonden roepen op tot onderzoek door de VS naar tactieken van Amazon
- Wiskundigen ontrafelen draad van snaartheorie
- Zijn de reuzenlibellen uit het paleozoïcum nog steeds onder ons?
- Nieuwe studie onthult zeldzame modderschaal mortuariumbehandeling van Egyptische mummie
- Het verhaal van Rum Jungle:een uraniummijn uit de Koude Oorlog die al tientallen jaren zuur in het milieu spuwt
- Gegevenssonificatie:geluiden uit de hele Melkweg
- Hoe de onbekende variabele van driehoeken op te lossen met parallelle lijnen en theorema's
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
