Wetenschap
Teams van mobiele 3D-printrobots kunnen bruggen op aarde repareren en naar Mars bouwen
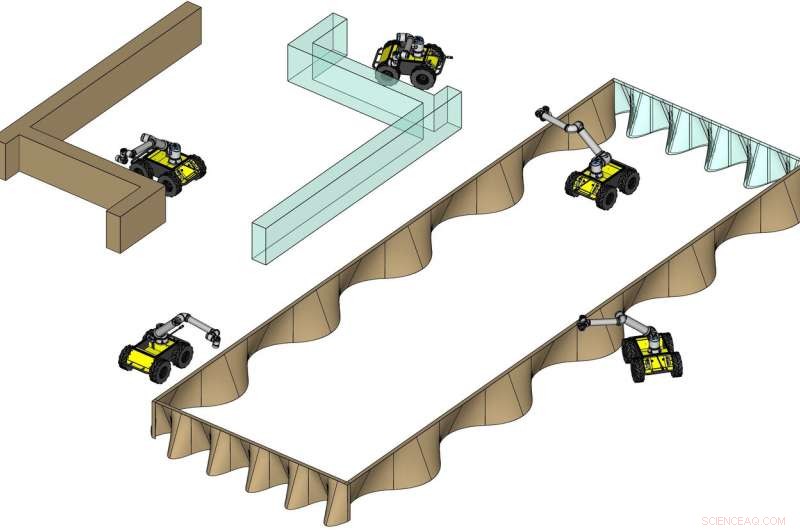
Een multidisciplinair roboticateam, bestaande uit professoren van de NYU Tandon School of Engineering, ontwerpt besturingssystemen voor 3D-printers op robotarmen bovenop mobiele, zwervende platforms. Werkend in teams -- een concept genaamd collectieve additieve fabricage (CAM) -- deze printers, met machine learning en andere kunstmatige intelligentie (AI)-mogelijkheden, zou burgerlijke structuren kunnen herstellen; werken in oceaandiepten en rampgebieden; of ga zelfs naar de ruimte om op de maan te werken, Mars, en verder. Krediet:NYU Tandon
Commercieel 3D-printen - of additive manufacturing (AM) - is een bloeiende industrie. Maar als printers werden bevrijd van de typische opstelling met een immobiele doos en een portaal, en vrijgelaten om in roving te werken, samenwerkende teams, de AM-business zou veel groter kunnen zijn met veel meer toepassingen, onder meer als robotmetselaars op bouwplaatsen en het repareren van afbrokkelende stedelijke en landelijke civiele infrastructuur.
Een multidisciplinair robotica-team aan de NYU Tandon School of Engineering, georganiseerd door NYU's Center for Urban Science and Progress (CUSP) en ondersteund door een subsidie van $ 1,2 miljoen van de National Science Foundation (NSF), werkt eraan om het concept te realiseren door autonome systemen voor 3D-printers te ontwerpen op robotarmen die aan mobiele apparaten zijn bevestigd, zwervende platforms. Deze printers, die in teams functioneren - een concept dat collectieve additieve fabricage (CAM) wordt genoemd), met machine learning en andere kunstmatige intelligentie (AI)-mogelijkheden, zou bruggen kunnen repareren, tunnels en andere openbare constructies; werken in oceaandiepten en rampgebieden; of ga zelfs naar de ruimte om op de maan te werken, Mars, en verder.
De onderzoekers, Chen Feng, Maurizio Porfiri, Ludovic Righetti, en Weihua Jin, professoren in de departementen Civiele Techniek en Stedenbouw, Werktuigbouwkunde en Luchtvaart- en Ruimtevaarttechniek, en elektrische en computertechniek, zal zich concentreren op drie gebieden die cruciaal zijn om CAM-teams voor 3D-printen levensvatbaar te maken:autonomie, controle, realtime systemen en netwerken:
- Planning en lokalisatie:printers moeten kunnen lokaliseren ten opzichte van elkaar en de structuren die ze bouwen terwijl het verandert en groeit, en doe dit zonder afhankelijk te zijn van wereldwijde positioneringssystemen, vooral voor buitenaardse toepassingen
- Modelvoorspellende controle:de mobiele basis en manipulator moeten zowel efficiënt als stabiel genoeg zijn om snel en van hoge kwaliteit te kunnen printen, en in staat om zich in realtime aan te passen aan onverwachte of ongewenste variaties in de reële omstandigheden op de locatie, of in onverwachte variaties in hoe de printerkop cement of ander materiaal afzet
- Afdrukken en coördinatie:synchronisatie van de beweging van meerdere printers met behulp van de ontwerpen van de te printen onderdelen en de daadwerkelijk evoluerende structuren zelf als kaarten voor de fysieke coördinatie van printrobots
Feng legde uit dat het doel is voor nauwkeurigheid, efficiëntie, en aanpassingsvermogen aan de omgeving en aan realtime omstandigheden - in plaats van de manier waarop een navigatie-app een voertuig omleidt waarvan het voelt dat het van een in kaart gebrachte koers is afgeweken. In tegenstelling tot de typische op GPS gebaseerde navigatiedienst, echter, de aanpassingen moeten razendsnel en tot op enkele millimeters nauwkeurig zijn, niet enkele tientallen meters. Hij voegde eraan toe dat de unieke combinatie van expertise van het team op het gebied van robotica, kunstmatige intelligentie, controle theorie, en dynamische systemen maken de uitdagingen overkomelijk.
Feng zal zich richten op planning en lokalisatie, het aanpakken van uitdagingen zoals hoe de robot in staat te stellen te identificeren wanneer en wanneer hij geen hoge mate van precisie nodig heeft om zichzelf te lokaliseren.
"De robot moet zich snel naar het printgebied kunnen verplaatsen, observeer de werkelijke omstandigheden, zoals oneffen grond, aangezien de echte wereld niet vlak is - maak dan onmiddellijk compensaties, " zei hij. "En hoewel we een hogere mate van nauwkeurigheid willen hebben in het structuurgebied, hoe verder je van structuur bent, hoe minder je nodig hebt, " legde hij uit. "Dit zal een nieuw soort proactieve lokalisatie inhouden."
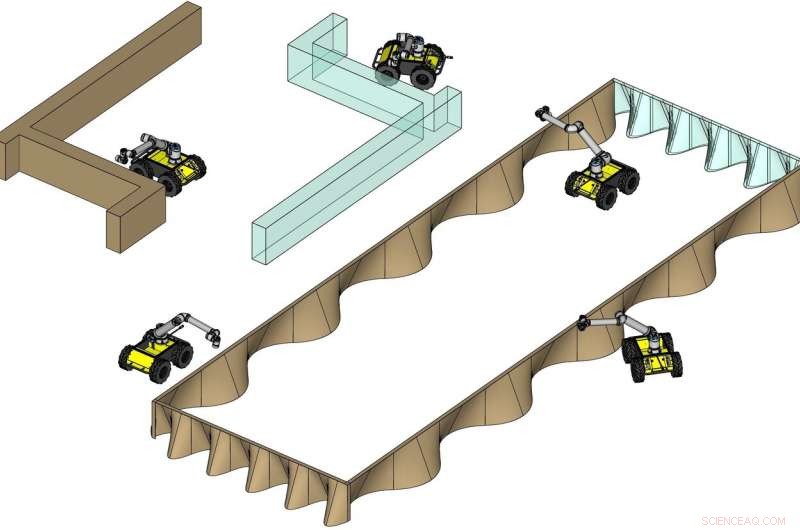
NYU Tandon-hoogleraren Chen Feng, Ludovic Righetti en Maurizio Porfiri ontwerpen systemen voor collectieve additive manufacturing, waarin teams van mobiele 3D-printrobots samenwerken om constructies te repareren of te bouwen, of zelfs werken op de maan of Mars. Krediet:NYU Tandon
Righetti zal werken aan realtime optimale besturingsalgoritmen van elke mobiele printer, zodat de robot zich snel aan de omgeving kan aanpassen.
"Elke robot moet observeren wat er wordt afgedrukt, autonoom associëren met het projectontwerp, en direct herkennen of de gedrukte structuur ervan is afgeweken, en met hoeveel, en al die tijd beslissen wat de volgende beste acties zijn om te zorgen voor een goede afdruk van de structuur, " hij zei.
Porfiri zal een wiskundig raamwerk ontwikkelen om de robots in staat te stellen hun respectievelijke acties autonoom te coördineren binnen de evoluerende fysieke omgeving, waardoor meerdere mobiele printers tegelijkertijd een structuur kunnen creëren met een hogere efficiëntie. Dit vermogen zou vooral belangrijk zijn op plaatsen zoals Mars, waar geen externe server dichtbij genoeg is om de gecoördineerde inspanningen van de robots zonder vertraging te controleren.
"Anders dan in formatie vliegende drones of autonome auto's die afstand van elkaar houden, onze mobiele printers laten een unieke voetafdruk achter in de fysieke omgeving:het te printen object. Mijn werk zal deze voetafdruk benutten om effectieve algoritmen voor coördinatie en collectief printen vast te stellen."
Jin zal het team helpen nieuwe composietmaterialen te ontwikkelen die geschikt zijn voor mobiel 3D-betonprinten. Het team is van plan om de effectiviteit van de algoritmen aan te tonen door real-world 3D-printen van die nieuwe betonsoorten met behulp van mobiele printers die ze zullen bouwen aan NYU Tandon.
"Om het volledige potentieel van collectieve additive manufacturing te ontketenen, verschillende wetenschappelijke grenzen moeten worden verlegd, zorgen voor een optimale inzet van meerdere mobiele robots die grote structuren printen volgens een ontworpen, virtueel ontwerp, " zei Feng.
Het project omvat een industriële workshop over CAM, een openbare buitententoonstelling, betaalbare/open educatieve kit op CAM, K-12 desktopschaal CAM-competitie, ondernemersactiviteiten en een diversiteitsinspanning voor studenten van alle achtergronden.

Hoofdlijnen
- Nieuwe oude dolfijnsoort Urkudelphis chawpipacha ontdekt in Ecuador
- Gebruik van DNA-extractie
- Wat zijn de functies van mRNA & tRNA?
- Is het tijd dat ons begrip van evolutie evolueert?
- Micro-evolutie: definitie, proces, micro versus macro & voorbeelden
- Waar bevindt zich DNA in plantencellen?
- Ribosomen: definitie, functie en structuur (eukaryoten en prokaryoten)
- Afbraak in het Noordpoolgebied
- Hoe duplicaten in twee rijen in OpenOffice te verwijderen






 Hevige stormen scheuren door Grieks toeristengebied, zes doden
Hevige stormen scheuren door Grieks toeristengebied, zes doden- Zijdevezels kunnen hightech natuurlijke metamaterialen zijn
- 2,7 miljoen jaar oude ijskern getrokken uit Antarctica
- Het verschil tussen histon en nonhistone
- Landwaardebelasting in Portland zou het eigen vermogen voor huiseigenaren verbeteren, ontwikkeling stimuleren
- Het oorsprongsverhaal van de elementen modelleren
- Olieopruiming in Zuid-Nigeria nog ver van doel
- Berekening van relatieve standaardfout
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | German | Dutch | Danish | Norway | Portuguese | Swedish |

-
Wetenschap © https://nl.scienceaq.com
