Wetenschap
Onderzoekers ontwikkelen processtroom voor 3D-printen met hoge resolutie van zachte mini-robotactuatoren
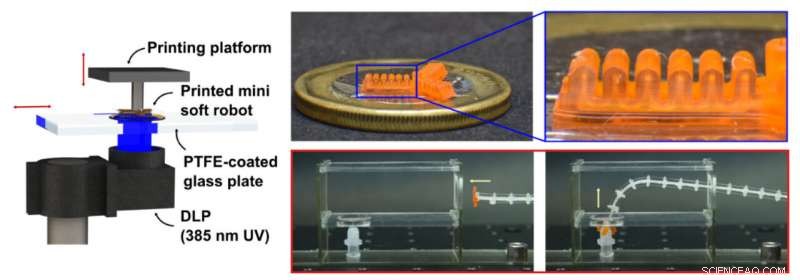
Er wordt een generieke processtroom voorgesteld om het 3D-printen van miniatuur zachte pneumatische aandrijvingen die kleiner zijn dan een muntstuk te begeleiden. Een zachte vuilverwijderaar met een geïntegreerde miniatuurgrijper kan navigatie door een beperkte ruimte en het verzamelen van kleine voorwerpen op moeilijk bereikbare plaatsen realiseren. Krediet:SUTD
Zachte robots zijn een klasse robotsystemen die zijn gemaakt van conforme materialen en die zich veilig kunnen aanpassen aan complexe omgevingen. Ze hebben de laatste tijd een snelle groei doorgemaakt en zijn verkrijgbaar in een verscheidenheid aan ontwerpen die meerdere lengteschalen omvatten, van meter tot submicrometer.
Vooral, kleine zachte robots op millimeterschaal zijn van praktisch belang omdat ze kunnen worden ontworpen als een combinatie van miniatuuractuators die eenvoudig worden aangedreven door pneumatische druk. Ze zijn ook zeer geschikt voor navigatie in krappe ruimtes en manipulatie van kleine objecten.
Echter, het verkleinen van zachte pneumatische robots tot millimeters resulteert in fijnere kenmerken die met meer dan één orde van grootte worden verminderd. De complexiteit van het ontwerp van dergelijke robots vereist grote delicatesse wanneer ze worden vervaardigd met traditionele processen zoals gieten en zachte lithografie. Hoewel opkomende 3D-printtechnologieën zoals digitale lichtverwerking (DLP) hoge theoretische resoluties bieden, het omgaan met holtes en kanalen op microschaal zonder verstopping te veroorzaken, is nog steeds een uitdaging. Inderdaad, succesvolle voorbeelden van 3D-printen van miniatuur zachte pneumatische robots zijn zeldzaam.
Onlangs, onderzoekers uit Singapore en China, namelijk van de Singapore University of Technology and Design (SUTD), Southern University of Science and Technology (SUSTech) en Zhejiang University (ZJU), stelde een generieke processtroom voor voor het begeleiden van DLP 3D-printen van miniatuur pneumatische actuators voor zachte robots met een totale grootte van 2-15 mm en een afmeting van 150-350 m (zie afbeelding). Hun onderzoek is gepubliceerd in Geavanceerde materiaaltechnologieën .
"We hebben gebruik gemaakt van de hoge efficiëntie en resolutie van DLP 3D-printen om miniatuur zachte robotactuators te fabriceren, " zei universitair hoofddocent Qi (Kevin) Ge van SUSTech, hoofdonderzoeker van het onderzoeksproject. "Om betrouwbare afdrukgetrouwheid en mechanische prestaties in de gedrukte producten te garanderen, we hebben een nieuw paradigma geïntroduceerd voor systematische en efficiënte afstemming van de materiaalformulering en belangrijke verwerkingsparameters."
Bij DLP 3D-printen, foto-absorbers worden vaak toegevoegd aan polymeeroplossingen om de printresoluties in zowel laterale als verticale richtingen te verbeteren. In de tussentijd, een te hoge dosis leidt tot een snelle achteruitgang van de elasticiteit van het materiaal, wat cruciaal is voor zachte robots om grote vervormingen te doorstaan.
"Om tot een redelijke afweging te komen, we selecteerden eerst een foto-absorber met een goede absorptie bij de golflengte van het geprojecteerde UV-licht en bepaalden de juiste materiaalsamenstelling op basis van mechanische prestatietests. Volgende, we hebben de uithardingsdiepte en XY-getrouwheid gekarakteriseerd om de geschikte combinatie van belichtingstijd en gesneden laagdikte te identificeren, ", legt mede-eerste auteur Yuan-Fang Zhang van SUTD uit.
"Door deze processtroom te volgen, we zijn in staat om een assortiment miniatuur zachte pneumatische robotactuators te produceren met verschillende structuren en morphing-modi, allemaal kleiner dan een munt van één Singaporese dollar, op een zelfgebouwd multimateriaal 3D-printsysteem. Dezelfde methode moet compatibel zijn met commerciële stereolithografie (SLA) of DLP 3D-printers, aangezien er geen hardwareaanpassing vereist is, " zei corresponderende auteur Professor Qi Ge van SUSTech.
Om de mogelijke toepassingen te illustreren, de onderzoekers bedachten ook een zachte vuilverwijderaar bestaande uit een continuümmanipulator en een 3D-geprinte miniatuur zachte pneumatische grijper. Hij kan door een kleine ruimte navigeren en kleine voorwerpen op moeilijk bereikbare plaatsen verzamelen.
De voorgestelde aanpak maakt de weg vrij voor 3D-printen van miniatuurzachte robots met complexe geometrieën en geavanceerde multimateriaalontwerpen. Deze integratie van geprinte miniatuur zachte pneumatische aandrijvingen in een robotsysteem biedt mogelijkheden voor potentiële toepassingen zoals onderhoud aan straalmotoren en minimaal invasieve chirurgie.
 De factoren vinden die de staalcorrosie in gewapend beton het meest beïnvloeden
De factoren vinden die de staalcorrosie in gewapend beton het meest beïnvloeden- Wetenschappers maken 3D-geprinte, microscopisch kleine gassensoren:schilderspallets zonder een vleugje pigment
- Blauwe pigmentontdekker maakt belangrijke ontwerpvooruitgang voor toekomstig duurzaam, levendige pigmenten
- Een universele methode om eenvoudig stevige en rekbare hydrogels te ontwerpen
- Röntgenfoto's laten zien hoe perioden van stress een ijstijdhyena tot op het bot veranderden
- Dataset kan vragen over de configuratie van supercontinent Rodinia oplossen
- Inzicht in kwikdamplampen en -balans
- Levenscyclus van een fabriek voor de kleuterschool
- Wiskundige modellering werpt nieuw licht op hoe continenten gevormd kunnen zijn
- Studie bekijkt hoe landaankopen de klimaatverandering beïnvloeden
Hoofdlijnen
- Zooplankton Vs. fytoplankton
- Virussen delen genen met organismen in de levensboom
- De verschillen tussen Catecholamines en Cortisol
- DNA-replicatie vergelijken en contrasteren in prokaryoten en eukaryoten
- Wat is een chromosoom?
- 85 nieuwe soorten beschreven door de California Academy of Sciences in 2017
- Hoe CFU uit verdunning te berekenen
- Het idee testen dat milieu-uitdagingen de evolutie van grotere hersenen stimuleren
- Is er een zaak tegen geluk?
- Een duurzaam antwoord op industriële vervuiling? Dat zijn bananen!

- Tinder een goed voorbeeld van hoe mensen technologie gebruiken voor meer dan we denken

- FAA misleidde Congres over Boeing MAX-inspecteursopleiding:rapport

- VW schrapt duizenden banen om elektrische transitie te financieren

- Apple koopt zelfrijdende startup Drive.ai


 Duurzaamheid van nieuw creosootalternatief bevestigd
Duurzaamheid van nieuw creosootalternatief bevestigd- De Levelland UFO-ontmoeting uit 1957
- Onderzoek naar de relatie tussen het tweelichaam en het collectief
- Uit onderzoek blijkt dat het brandstofverbruik van een auto kan worden geannuleerd bij uw volgende aankoop van een auto
- Boeken beschrijven wat er nodig is om astronauten in de ruimte te krijgen
- VS zet zich schrap voor extreme hitte nu de weekendtemperaturen stijgen
- Stop met het uitbesteden van de regulering van haatspraak aan sociale media
- Laag vermogen, hoogwaardige optische ontvangers
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
