Wetenschap
Een nieuwe methode om gebaren te genereren voor verschillende sociale robots
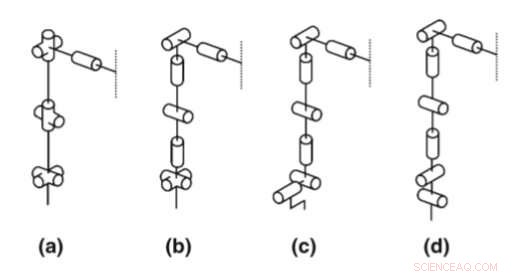
Visualisatie van de configuratie van het rechterarmgewricht van een aantal robots met 7 DOF-armen. De stippellijn geeft de middellijn van het lichaam weer. een ASIMO, b ARMAR-III, c WABIAN-2, d iCub Credit:Van de Perre et al.
Sociale robots zijn ontworpen om op natuurlijke wijze met mensen te communiceren, hen te helpen met verschillende taken. Het effectieve gebruik van gebaren zou de interactie tussen mens en robot aanzienlijk kunnen verbeteren, waardoor robots zowel verbaal als non-verbaal kunnen communiceren.
Het ontwerp van de meeste sociale robots is geïnspireerd op het menselijk lichaam, omdat dit het gemakkelijker maakt om mensachtige gebaren en gedragingen na te bootsen. Echter, verschillende robots kunnen verschillende morfologieën hebben, die hen in staat stellen om de taken waarvoor ze zijn ontworpen, het beste aan te pakken.
Onderzoekers aan de Vrije Universiteit Brussel, in België, hebben onlangs een nieuwe benadering geïntroduceerd op basis van een generieke gebarenmethode om de invloed van verschillende ontwerpaspecten te bestuderen. hun papier, gepubliceerd op Springer's Internationaal tijdschrift voor sociale robotica , presenteert een raamwerk dat snel gebaren genereert die passen bij de specifieke configuratie van een robot.
"In deze krant, we stellen een nieuwe methodologie voor om de invloed van verschillende ontwerpaspecten te bestuderen op basis van een generieke gebarenmethode, " schreven de onderzoekers in hun paper. "De gebarenmethode is ontwikkeld om de moeilijkheden bij het overbrengen van gebaren naar verschillende robots te overwinnen, een oplossing bieden voor het correspondentieprobleem."
De methode die door dit team van onderzoekers is bedacht, kan problemen oplossen bij het overbrengen van gebaren naar robots met verschillende vormen en configuraties. Gebruikers kunnen de morfologische informatie van een robot invoeren en de tool zal deze gegevens gebruiken om de gebaren voor die robot te berekenen.
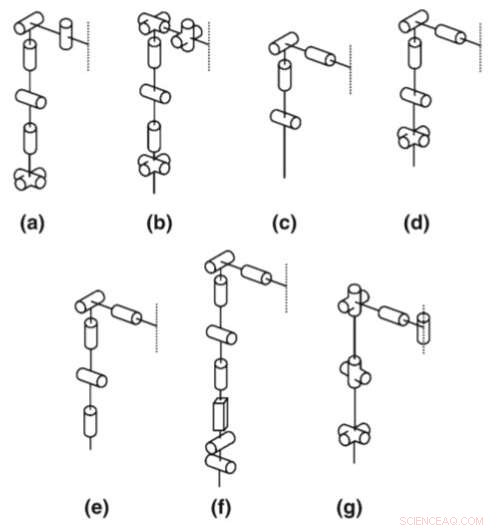
Visualisatie van de configuratie van het rechterarmgewricht van een aantal robots met verschillende armmorfologieën. De stippellijn geeft de middellijn van het lichaam weer. een Pyrene, b WE-4RII, c Robovie, dKHR-3, en NAO, f R1, g ARMAR-IV. Krediet:Van de Perre et al.
"Een kleine set morfologische informatie, ingevoerd door de gebruiker, wordt gebruikt om het generieke raamwerk van de software tijdens runtime te evalueren, " legden de onderzoekers uit. "Daarom, gebaren kunnen snel en eenvoudig worden berekend voor een gewenste robotconfiguratie. Door een reeks gebaren te genereren voor verschillende morfologieën, het belang van specifieke gewrichten en hun invloed op een reeks houdingen en gebaren kan worden bestudeerd."
Om ervoor te zorgen dat hun methode toepasbaar zou zijn op verschillende soorten robots, de onderzoekers lieten zich inspireren door een menselijk basismodel. Dit model bestaat uit verschillende kettingen en blokken, die worden gebruikt om de verschillende rotatiemogelijkheden van mensen te modelleren. De onderzoekers hebben aan elk gewrichtsblok een referentiekader toegewezen met behulp van het menselijke basismodel als referentie om het algemene raamwerk achter hun methode te construeren.
"Om gebaren te genereren voor een bepaald robotmodel, de methode gebruikt de Denavit-Hartenberg (DH) parameters van de configuratie als invoer, waarbij de verschillende gewrichten van de robot zijn gegroepeerd in kettingen en blokken van het menselijke basismodel, " legden de onderzoekers uit in hun paper. "Tijdens runtime, het generieke raamwerk van de methode wordt geëvalueerd met behulp van deze informatie, en als zodanig, aangepast aan de robot in kwestie."
Omdat verschillende functies belangrijk zijn voor verschillende soorten gebaren, de door de onderzoekers bedachte methode is ontworpen om in twee verschillende modi te werken, namelijk de blokmodus en de eindeffectormodus. De blokmodus wordt gebruikt om gebaren zoals emotionele uitdrukkingen te berekenen in gevallen waarin de algehele plaatsing van de arm cruciaal is. De eindeffectormodus, anderzijds, berekent gebaren in situaties waarin de positie van de eindeffector belangrijk is, zoals tijdens het manipuleren of aanwijzen van objecten.
"De gebarenmethode bewijst zijn nut in het ontwerpproces van sociale robots door een indruk te geven van de benodigde hoeveelheid complexiteit die nodig is voor een bepaalde taak, en kan interessante inzichten geven in het vereiste gewrichtshoekbereik, ', aldus de onderzoekers.
In hun studie hebben de onderzoekers pasten hun methode toe op het virtuele model van een robot genaamd Probo. Ze gebruikten dit voorbeeld om te illustreren hoe hun methode zou kunnen helpen bij het bestuderen van de collocatie van verschillende gewrichten en gewrichtshoekbereiken in gebaren. In de toekomst, hun aanpak zou kunnen helpen bij de ontwikkeling van sociale robots die natuurlijke gebaren kunnen uitvoeren die passen bij hun morfologie en toepassing.
© 2019 Wetenschap X Netwerk
 Wetenschappers ontwikkelen lijm met industriële sterkte die kan worden losgemaakt in een magnetisch veld
Wetenschappers ontwikkelen lijm met industriële sterkte die kan worden losgemaakt in een magnetisch veld- Waar is een lucifer van gemaakt?
- Identificatie van een ongrijpbaar molecuul dat de sleutel is tot verbrandingschemie
- Biochemische superlijm opent nieuwe benadering van vaccinontwikkeling
- Chemie Labs voor middelbare scholieren
- Bewijs voor ijstijd van vóór MIS-6 in het zuidoosten van Tibet
- Met emotioneel afscheid, Duitsland sluit laatste zwarte kolenmijn (Update)
- Huizen en steden koel houden in extreme hitte:tips van Tucson
- Tropische koraalsoorten met extreem risico door klimaatverandering
- Oceanen, klimaatrapport goedgekeurd na een nachtelijke impasse:afgevaardigden
Hoofdlijnen
- Nieuwe bevindingen verduidelijken de rol van de schildklier bij seizoensveranderingen bij zoogdieren
- Leeftijd van moeders beïnvloedt genetische overeenkomst tussen tweelingen
- De connectiviteit van tijgers in stand houden en uitsterven tot een minimum beperken in de volgende eeuw
- Hightech camera helpt zeugen en biggen te beschermen
- Welke is eencellig: Prokaryoten of eukaryoten?
- Hoe elektroforese te analyseren
- Wat gebruikt Gamma Roggen?
- De definitie van moleculaire celbiologie
- Interne factoren die van invloed zijn op celverdeling
- Waarom lijden vrouwen en zwaarlijvige passagiers de ergste auto-ongelukken?
- Het blootleggen van de grootste kwetsbaarheid voor computerchips die ooit is ontdekt

- Tesla en Ford handelen uitdagingen in macho-vrachtwagenwereld

- Lancering van lekkende sites toont dilemma van radicale transparantie

- Uber, Cabify stopt diensten in Barcelona na aanranding van stakende chauffeurs


 Rassen van gefunctionaliseerde aromaten uitgebreid door heteroatoom-deelgenomen ligninesplitsing
Rassen van gefunctionaliseerde aromaten uitgebreid door heteroatoom-deelgenomen ligninesplitsing- VS testen onbemande gevechtsvliegtuigen die worden bestuurd vanuit een ander vliegtuig
- Hoe lekker is jouw nieuwjaarsbubbel? Luister goed
- Toxiciteit van huishoudelijk bleekmiddel
- Desastreuze orkanen in de VS sinds 2000. Zou Harvey ze kunnen overtreffen?
- Elektrische voertuigen:een nieuw model om tijdverspilling aan oplaadpunten te verminderen
- Gemeenschappelijk vuurwerk laat giftige metalen in de lucht vrij
- Soorten bomen in moerassen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
