Wetenschap
Drones kunnen helpen het maanoppervlak met extreme precisie in kaart te brengen
Het verkennen van de maan is de laatste tijd steeds meer een centraal punt geworden, vooral met een reeks landers die onlangs met wisselend succes zijn gelanceerd. Een van de problemen waarmee deze landers en eventuele toekomstige menselijke missies worden geconfronteerd, is het begrijpen van het terrein waarop ze landen en waar ze mogelijk doorheen gaan in het geval van een rover of een mens. Om dit probleem te helpen bestrijden heeft een team van onderzoekers uit Zwitserland een droneconcept ontwikkeld dat kan helpen enkele van de interessantere, potentieel gevaarlijke gebieden op de maan in kaart te brengen.
Het in kaart brengen van de maan is al jaren een prioriteit. Sommige van de meest opwindende gebieden, zoals de Permanently Shadows Regions (PSR) aan de maanpolen die een aanzienlijke hoeveelheid waterijs bevatten, zijn echter in de beste afbeeldingen ervan slechts in kaart gebracht met een resolutie van ongeveer 1 meter per pixel. Dat is inclusief kunstmatige verbetering door AI-ondersteunde algoritmen.
Dat resolutieniveau is niet voldoende om bruikbare planningsgegevens te leveren voor potentiële missies van een rover of menselijke missie; het wiel van een bepaalde rover zelf zal niet eens zo breed zijn, laat staan hopen een obstakel van die omvang te kunnen overwinnen. Bijgevolg moeten alle rovers die we sturen handmatig worden bestuurd of zich heel langzaam en autonoom een weg banen. Gezien de beperkte operationele tijdlijn van deze verwachte rovermissies zou dat trage tempo hun vermogen kunnen beperken om de waardevolle hulpbronnen en locaties te doorzoeken waarvan wetenschappers denken dat ze zich in de PSR's verbergen.
De voor de hand liggende oplossing voor dit probleem is om een andere vorm van robot als verkenner te laten dienen, vergelijkbaar met wat Ingenuity tot voor kort had gedaan voor de Perseverance-rover op Mars. Dankzij die samenwerking kon Perseverance het record vestigen voor de langste autonome rit van één dag op een andere planeet – in totaal ongeveer 700 meter. Als een verkenner details van het maanoppervlak in kaart zou kunnen brengen vóór een potentiële rover, zou deze zelfs sneller kunnen bewegen dan het tempo van Perseverance.
Daartoe zijn er tal van geplande missies geweest om precies dat te doen. In een recent artikel gepubliceerd in Acta Astronautica Romeo Tonasso en zijn collega's van de Ecole Polytechnique Federale de Lausanne beschrijven hun idee en splitsen deze bestaande missieconcepten op in twee categorieën:groot en klein.
Grotere systemen kunnen geteste, kant-en-klare chemische voortstuwingssystemen bevatten die, wanneer ze in de vlucht worden getest, omvangrijk kunnen zijn en potentieel gevaarlijke chemicaliën kunnen gebruiken. Kleinere systemen zouden verschillende vormen van chemische voortstuwing kunnen gebruiken, zoals H2 O2 raketten, of zelfs meer alledaagse vormen van voortbeweging, zoals door letterlijk met benen van de grond te springen. Veel van de technologieën voor dat soort voortstuwing zijn echter nog niet op een voldoende hoog ontwikkelingsniveau voor gebruik in een praktische missie.
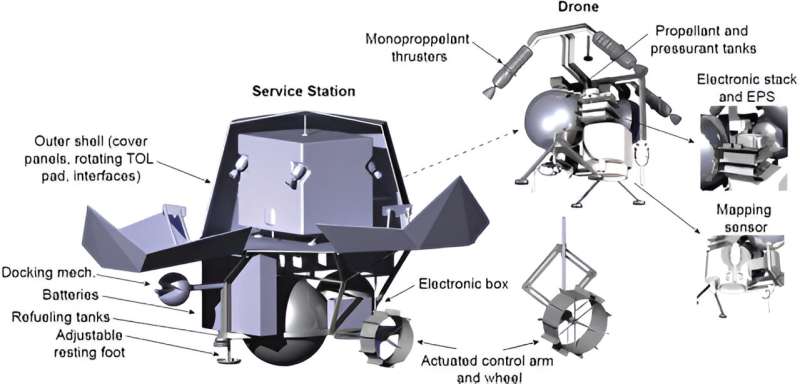
Het vinden van een middenweg tussen het oudere, zwaardere trechtermodel en het nieuwere, ongeteste model was een van de belangrijkste ontwerpbeperkingen voor het nieuwe concept. De oplossing die ze bedachten was een raketaangedreven drone die zou worden gelanceerd vanaf en zou terugkeren naar een basisstation dat zou kunnen worden gesleept door een rover of een ander maanverkenningsvoertuig.
Het basisstation zou de drone na elke vlucht bijtanken, waardoor hij meerdere vluchten kon maken zonder overtollig drijfgas mee te nemen. Met deze opstelling zou het systeem maar liefst 9 vierkante kilometer van het maanoppervlak in kaart kunnen brengen met een resolutie die nuttig zou zijn voor zowel de missieplanning van de rover als van de mens. Aan het einde van deze inspanning zou het basisstation moeten worden bijgetankt, zodat het zijn missie kan voortzetten, wat een centraal onderdeel is van het ontwerpconcept.
Dit idee heeft nog meer voordelen:veel andere hoppers moeten op de grond landen, en hun voortstuwingssysteem kan een aanzienlijke hoeveelheid chaos in de maanomgeving veroorzaken. Dat is vooral ongewenst als het oppervlak waarop ze landen commercieel haalbare materialen zoals waterijs bevat. Door terug te landen op een mobiel dockingstation wordt ook het opwaaien van stof geëlimineerd, wat de werkzaamheden in een gebied aanzienlijk kan hinderen, gezien de tijd die het stof nodig heeft om zich op de maan te nestelen.
Hoewel er enkele details in de paper staan, waaronder een architectuurdiscussie op hoog niveau waarbij gebruik wordt gemaakt van in de ruimte geteste hardware, is dit idee tot nu toe slechts een concept. Nu de datum van de menselijke landing van Artemis III echter snel nadert, zouden NASA en andere ruimtevaartorganisaties ongetwijfeld profiteren van een succesvolle verkenningsmissie zoals die beschreven in het artikel. Of ze het idee wel of niet over de finish zullen krijgen, valt echter nog te bezien.
Meer informatie: Roméo Tonasso et al, Een maanverkenningsdrone voor gezamenlijke verkenning en het in kaart brengen van extreme locaties met hoge resolutie, Acta Astronautica (2024). DOI:10.1016/j.actaastro.2024.02.006
Aangeboden door Universe Today
 Onderzoek wat titanium implantaten hun opmerkelijke biocompatibiliteit geeft
Onderzoek wat titanium implantaten hun opmerkelijke biocompatibiliteit geeft- Onderzoekers maken superlijm op basis van slangengif die het bloeden binnen enkele seconden stopt met zichtbaar licht
- Nieuwe doelwitten in de strijd tegen antibioticaresistentie
- Kan een propaantank ontploffen?
- Hoe beïnvloedt zure regen gebouwen en standbeelden?
- Regel voor betaalbare schone energie kan leiden tot meer luchtvervuiling en koolstofemissies, studie zegt:
- Nieuwe inzichten in de vorming van aardkorst
- Lab-experimenten bieden geloof aan de theorie dat er een subductieve korst bestaat aan de basis van de bovenmantel van de aarde
- Hoe kan een wasbeer worden gereproduceerd?
- De gemiddelde windsnelheid tijdens een onweersbui
Hoofdlijnen
- Moeite met onthouden? Vertel je vrienden om een wandeling te maken
- Wat is de eerste stap in een polymerasekettingreactie?
- Drummen bij spechten lijkt neurologisch op zingen bij zangvogels
- Reviewing over moleculaire geneeskunde onthult de rol van IGF bij kanker en andere proliferatieve ziekten
- Hoe je je hond traint in basisvaardigheden en waarom het belangrijk is
- Verschrikkelijke sneeuwman? Nee - studie koppelt DNA-monsters van vermeende Yeti's aan Aziatische beren
- Afrikaanse gewassen bieden een voedzame, glutenvrije oplossing
- Neanderthalers waren eigenlijk prehistorische Picasso's
- Onderzoekers bewerken genen om COVID-19 te voorkomen en te behandelen in het laboratorium. Werkt het bij mensen?
- Een techniek om oceanen op andere werelden te vinden
- Toekomstige ruimtereizigers kunnen kosmische vuurtorens volgen

- Op hol geslagen ster zou de verdwijnende act van zwarte gaten kunnen verklaren
- 'S Werelds grootste raket vliegt naar Mars na perfecte lancering (update)

- Robottoolkit toegevoegd aan NASA's Mars 2020-rover

 Hoe volumes van vijfhoekige prisma's te berekenen
Hoe volumes van vijfhoekige prisma's te berekenen- Wat is appelzuur?
- Vrouwenvoetbal kan in populariteit toenemen, maar het spel vecht nog steeds om te overleven
- Essentiële supermarktmedewerkers worden geconfronteerd met dagelijks lijden en misbruik door managers, studie vondsten
- Platina nanodeeltjes voor selectieve behandeling van leverkankercellen
- Door aardbevingen geteisterd deel van Kroatië ziet gapende zinkgaten ontstaan
- Biomimetische vezelversterkte composieten op micro-/nanoschaal
- Hoe een deltapercentage berekenen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
