Wetenschap
Hoe Crusher werkt
 Crusher onbemand grondvoertuig Foto met dank aan Carnegie Mellon, Nationaal Robotica Engineering Center
Crusher onbemand grondvoertuig Foto met dank aan Carnegie Mellon, Nationaal Robotica Engineering Center Crusher maakte zijn debuut in echte monstertruckstijl:de twee prototypes gingen een gebouw van de Carnegie Mellon University binnen met schetterende muziek en flitsende lichten. Een Crusher stond erbij terwijl zijn tegenhanger verder rolde en stapels auto's verpletterde waar de meeste monstertrucks met hun staart tussen hun benen achteruit zouden rijden. Crusher is geen typische vrachtwagen. Hij kan recht over een verticale muur van 1,2 meter rijden terwijl hij 8, 000 pond vracht.
Crusher is een onbemand grondvoertuig ( UGV ) gefinancierd door DARPA en ontworpen door Carnegie Mellon's National Robotics Engineering Center ( NREC ). De strekking van het Crusher-project - dat voortbouwt op een andere door NREC ontworpen UGV genaamd Spinner (Crusher wordt soms Spinner-versie 2.0 ) – is zo ongeveer de strekking van al het door het leger gefinancierde onderzoek en ontwikkeling in de UGV-wereld op dit moment:meer waarnemingsvermogen, autonomie en robuustheid. Het Amerikaanse leger wil weinig dingen liever dan een onbemande, stille tank die onbeperkt laadvermogen kan dragen, verdedig zichzelf tegen de vijand en rijd ongehinderd over terrein dat de Hummer in foetushouding opgerold zou hebben.
De Crusher zal waarschijnlijk nooit massaproductie zien. De kosten zouden te hoog zijn (de ontwerpers noemen niet eens een nummer). Het is ontworpen als een functionerend prototype om verschillende technologieën te testen die de NREC ontwikkelt als onderdeel van een programma genaamd UPI .
UPI staat voor U bemand grondgevechtsvoertuig P erceptOR (offroad) l integratie, een door DARPA gefinancierde mondvol die experimenten omvat om "de mogelijkheden van grootschalige, onbemande grondvoertuigen (UGV) die autonoom opereren in een breed scala van complexe, off-road terreinen" [ref]. De 6,5-tons Crusher weegt bijna 30 procent minder dan Spinner en kan meer lading vervoeren. Het enige dat de NREC heeft weggelaten uit de upgrade van Spinner, is de mogelijkheid om door te blijven rijden als hij ondersteboven wordt gedraaid Geen woord over waarom die coole functie verdween, hoewel de logica zou suggereren dat het ofwel was om een aantal van Crusher's andere verbeterde functies mogelijk te maken of om een dure mogelijkheid te verminderen die misschien niet cruciaal is voor de hoofdmissie van UPI.
Dus, wat kan Crusher doen?
- Het is een onbemand voertuig dat voornamelijk is ontworpen voor verkennings- en ondersteunende functies, en het ontbreken van een menselijke bemanning zorgt voor nieuwe benaderingen voor het creëren van een ruige, flexibel voertuig dat enorme ladingen kan vervoeren. Bijvoorbeeld, Crusher kan onder bepaalde omstandigheden afzien van bepantsering, zodat hij meer voorraden kan dragen.
- uiteindelijk, Crusher kan autonoom navigeren over extreem terrein, compleet met greppels, rotsbarrières en door de mens gemaakte obstakels.
 Foto met dank aan Carnegie Mellon, Nationaal Robotica Engineering Center
Foto met dank aan Carnegie Mellon, Nationaal Robotica Engineering Center - Crusher kan alleen op batterijstroom werken, waardoor een bijna stille werking mogelijk is.
- Crusher kan wapens dragen, dus het kan langs de lijn gevechtsrollen op zich nemen.
Volgens de NRC De technologie van Crusher is zes tot tien jaar verwijderd van implementatie in de echte wereld. Hoewel kleiner, door mensen bestuurde robots hebben het slagveld al bereikt (zie Hoe militaire robots werken), enorm, onbemande robots zoals Crusher zijn nog steeds in laboratoria. De complexiteit van de waarnemings- en controlesystemen die nodig zijn voor een grootschalige robot om met onbekend terrein en met onbekende omstandigheden om te gaan, bevindt zich nog in de onderzoeks- en ontwikkelingsfase. De waarnemings- en navigatiesystemen van Crusher zijn prototypes die bedoeld zijn als testplatforms voor steeds innovatievere benaderingen van gevechtsvoertuigen op de grond die geen menselijke tussenkomst nodig hebben om hun missie uit te voeren.
In de volgende sectie, we zullen enkele van die systemen bekijken. Aangezien Crusher in de eerste plaats een militair project is, volledige details zijn niet beschikbaar voor het grote publiek, maar HowStuffWorks is er toch in geslaagd om interessante informatie te vinden.
Crusher-technologie
 Crusher-prototypes Foto met dank aan Carnegie Mellon, Nationaal Robotica Engineering Center
Crusher-prototypes Foto met dank aan Carnegie Mellon, Nationaal Robotica Engineering Center Er zijn drie primaire aandachtsgebieden in de ontwikkeling van Crusher:
- robuustheid extreem terrein te weerstaan zonder snelheid te verliezen, zelfs bij het dragen van 8, 000 pond vracht
- stille beweging op het slagveld om er een levensvatbare verkenningstroef van te maken
- autonome werking om scouting mogelijk te maken, verkennings- en zelfs gevechtsrollen zonder ook maar één mensenleven te riskeren
Het skelet van Crusher is gemaakt van aluminium en titanium. De romp is een aluminium ruimteframe (een open structuur van drijfstangen) met ultrastevige titanium knooppunten die de stangen verbinden voor extra sterkte in het waarschijnlijke geval van botsingen met grote, harde voorwerpen. Direct onder de romp bevindt zich een skidplate - in feite een hangende, schokgemonteerde stalen "bumper" die staat als een eerste verdediging, de romp beschermen tegen het eerste contact met keien, boomstronken en trappen.
 Foto met dank aan Carnegie Mellon, Nationaal Robotica Engineering Center
Foto met dank aan Carnegie Mellon, Nationaal Robotica Engineering Center Om hem over obstakels en over het algemeen onvriendelijk terrein te laten bewegen, Crusher sport een zes-wiel, vierwielaandrijving aangedreven door een hybride diesel-elektrisch opstelling die een bijna stille werking mogelijk maakt - een handig kenmerk bij verkenningswerk. Een 78 pk, turbodieselmotor fungeert als generator in het systeem, met een continu vermogen van 58 kilowatt (kW) om de 300 volt van Crusher op te laden, 18,7 kW, lithium-ion batterijpakket. De batterijen laten op hun beurt zes elektromotoren van 210 kW aandrijven, één in elk van de zes wielnaven. Elke motor produceert 282 pk. Zoals de meeste hybride-elektrische energiesystemen, Crusher maakt gebruik van regeneratief remmen om elke keer dat het langzamer gaat wat stroom terug te geven aan de accu's (zie Hoe hybride auto's werken voor meer informatie over regeneratief remmen). Het voertuig kan alleen op stille batterijstroom rijden gedurende 3 tot 16 km, afhankelijk van de snelheid en de lading.
Omdat elk wiel onafhankelijk wordt aangedreven, als een of twee sterven, Crusher kan doorgaan. Hij heeft slechts vier van de zes wielen nodig om zijn capaciteiten te behouden. En als het plotseling behoefte heeft aan een ommekeer -- zeg, aan drie zijden omgeven door ondoordringbare barrières - het kan zijn skid-steer capaciteit , een draaicirkel van nul, om snel over het hoofd te zien zonder enige bewegingsruimte.
Om onder laaghangende obstakels te passen, geconfronteerd met rotsachtig terrein of beter verbergen voor de vijand, Crusher heeft een instelbare rijhoogte van nul tot 30 inch (76 cm). Naast hoogteverstelling, De ophanging van Crusher kan een volledige 30 inch reizen om schokken te absorberen, en het beschikt over instelbare stijfheid voor verschillende bodemomstandigheden. We hebben een zicht onder de motorkap van Spinner kunnen vinden, Crusher's voorganger - onthoud dat Crusher een verbeterde versie van Spinner 1.0 is:
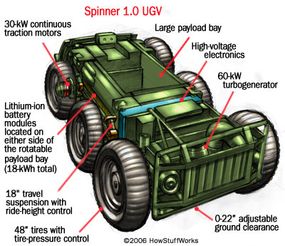 Crusher heeft upgrades in rijhoogteverstelling, schorsing reizen, voertuiggewicht en laadvermogen.
Crusher heeft upgrades in rijhoogteverstelling, schorsing reizen, voertuiggewicht en laadvermogen. Crusher's krachtige frame, opstelling met zeswielaandrijving en extreme veringsmogelijkheden stellen de UGV in staat om met hoge snelheden te reizen, momenteel tot 26 mph (42 km / u), over moeilijk terrein, geconfronteerd met obstakels zoals greppels, keien, steile hellingen en verticale barrières tot 4 voet, allemaal zonder een beat te missen.
stevigheid, kracht en stilte maken Crusher een ideaal verkenningsinstrument, maar het is vooral het autonomiesysteem van de UGV dat DARPA tot nu toe 35 miljoen dollar heeft uitgegeven om te ontwikkelen. De NREC heeft niet veel gedetailleerde informatie vrijgegeven over het UPI-systeem, maar zegt dat "deze technologie het waarnemingsvermogen over het hele voertuig verspreidt om de waarneming in evenwicht te brengen en ook voertuiggebieden ondersteunt die mogelijk minder bedreven zijn in het waarnemen van de omgeving. De [sensing]-software stelt Crusher ook in staat om eerder verzamelde informatie te 'leren' en toe te passen naar nieuwe obstakels."
Wel weten we dat de waarnemingshardware voornamelijk bestaat uit: LADAR (laserdetectie en bereik) eenheden en camera-arrays . Een LADAR-eenheid zendt een laserstraal uit om een gebied te scannen en meet hoe lang het duurt voordat de straal wordt teruggekaatst naar de lasersensor van de eenheid. Crusher heeft acht van deze units - vier die de omgeving horizontaal scannen en vier die verticaal scannen. Het gebruikt zes paar stereovisiecamera's voor dieptewaarneming en vier kleurencamera's om een kleurpixel toe te passen op elk afstandspunt dat wordt bepaald door de LADAR-sensor.
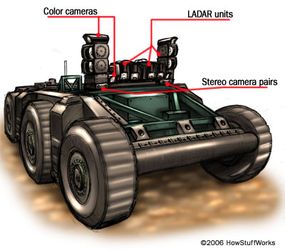 Vroege versie van het waarnemingssysteem van Crusher
Vroege versie van het waarnemingssysteem van Crusher De meest recente incarnatie van Crusher heeft een 18-voet telescopische mast voor het verzamelen van gegevens vanaf een hoger uitkijkpunt. De mast kan delen bevatten van de LADAR en camera-assemblage zoals hierboven te zien is, of het kan eenvoudigweg een extra set sensoren aan het waarnemingssysteem toevoegen.
 Foto met dank aan Carnegie Mellon, Nationaal Robotica Engineering Center
Foto met dank aan Carnegie Mellon, Nationaal Robotica Engineering Center Met alle LADAR- en cameragegevens gecombineerd, Crusher's ingebouwde CPU creëert een 3D-beeld van het landschap waarin Crusher reist. De CPU is een 700-MHz Pentium 3 die de mechanische activiteiten van Crusher bestuurt en de navigatiesoftware uitvoert die de verwerking van sensorgegevens afhandelt. Een traagheidsmeeteenheid: ( IMU ) detecteert de hoogte van Crusher, positie en bewegingsrichting met behulp van een combinatie van versnellingsmeters (kantelsensoren) en gyroscopen, zo is Crusher zich altijd bewust van zijn eigen beweging en positie ten opzichte van het landschap. De UGV heeft ook een ingebouwde GPS-ontvanger en een computergebaseerde GPS-database met voorgeprogrammeerde terreingegevens.
Tot dusver, veldexperimenten hebben aangetoond dat Crusher goed op weg is naar echte autonomie. Bij het testen, Crusher bewoog zich van GPS-waypoint naar GPS-waypoint op meer dan 1 km afstand van elkaar zonder enige controle van buitenaf. Met behulp van zijn waarnemings- en navigatiesystemen, Crusher kan direct op obstakels reageren - er is geen operator nodig om hem te vertellen wat hij moet doen als hij iets raakt. Het kan een helling van meer dan 40 graden beklimmen, rijd recht over een trede van 1,2 meter en steek een 80-inch greppel over met behulp van zijn eigen besluitvormingsmogelijkheden. Het vermogen om greppels over te steken is bijzonder cool - de banden van Crusher zijn zo gemonteerd dat ze naar beneden kunnen vallen om het voertuig te ondersteunen terwijl het een gat oversteekt.
 Foto met dank aan Carnegie Mellon, Nationaal Robotica Engineering Center
Foto met dank aan Carnegie Mellon, Nationaal Robotica Engineering Center Crusher-specificaties: :
- leeg voertuiggewicht :13, 200 pond (5, 990 kg)
- maximaal laadvermogen :8, 000 pond (3, 600kg)
- lengte :201 inch (510 cm)
- breedte :102 inch (260 cm)
- hoogte (figuur 16-inch/41 cm bodemvrijheid):60 inch (152 cm)
- bodemvrijheid :0 tot 30 inch (76 cm)
- bandendiameter: :49,5 inch (125,7 cm)
- top snelheid :26 mph (42 km/u) in minder dan 7 seconden
- laadvermogen (in twee interne baaien):57,7 kubieke voet (1,6 kubieke meter)
- mogelijke besturingsmodi :afstandsbediening op waypoint-gebaseerde navigatie volledige autonomie
Dankzij de specificaties voor afmetingen en gewicht kan een enkel C-130H-vrachtvliegtuig twee Crushers overal ter wereld ten strijde trekken. Met ingang van augustus 2006, Crusher is uitgerust met een Rafael Mini Typhoon-montage met een .50 kaliber geweer, wijzend op de mogelijkheid dat gevechtsrollen een steeds prominentere focus kunnen worden bij de ontwikkeling van autonomietechnologie voor militaire voertuigen. In de volgende sectie, we kijken naar de toekomst van het Crusher-prototype en ontdekken hoe het past in de algemene trend in militair onderzoek en ontwikkeling.
De toekomst van Crusher
 Foto met dank aan Carnegie Mellon, Nationaal Robotica Engineering Center
Foto met dank aan Carnegie Mellon, Nationaal Robotica Engineering Center Met ingang van 2006, het Amerikaanse leger heeft ongeveer 4, 000 gevechtsrobots voor actieve dienst. Het leger gebruikt deze robots voornamelijk om bommen te "snuffelen" en gebouwen en andere gesloten constructies op te ruimen. Het leger Toekomstige gevechtssystemen ( FCS ) programma wil ongeveer $ 300 miljoen uitgeven om updates te financieren om de rollen van slagveldrobots uit te breiden. De FCS zoekt robotmuilezels die vracht naast troepen over oneffen terrein kunnen vervoeren en veel grotere onbemande voertuigen die kunnen opereren zonder menselijke tussenkomst om gebieden te verkennen en grenzen te patrouilleren, cruciale gegevens terugsturen naar troepen. Als deze groot, autonome voertuigen kunnen ook enorme ladingen vervoeren over moeilijk terrein zonder snelheid te verliezen, dat zou een extra bonus zijn. Crusher of iets dergelijks zou ideaal zijn in de laatste rollen.
Crusher zelf zal waarschijnlijk geen implementatie zien. Het is voornamelijk een onderzoeksproject en zal tot 2008 worden getest en geëxperimenteerd. de NREC zal de Crusher-technologie overdragen aan DARPA, zodat deze kan worden toegepast op gerelateerde projecten, waarvan de meeste vallen onder het domein van het Future Combat System. De FCS voert ontwikkelingsprogramma's uit zoals het Armed Reconnaissance Vehicle (ARV), die streeft naar een volledig autonoom, gevechtsklaar voertuig voor verkenningsmissies; en het Autonoom Navigatiesysteem (ANS), een overkoepelend programma om autonomiemogelijkheden op gemeenschappelijk platform te ontwikkelen voor een breed scala aan militaire robots. Het algemene doel van FCS is een naadloze integratie van zowel bemande als onbemande voertuigen, grond en lucht, in een structuur die kan worden beheerd via een enkele, web-achtig besturingssysteem.
Via FCS, we kunnen over vijf tot tien jaar Crusher-achtige voertuigen zien die troepen ondersteunen in gevechtsoperaties. Ze zullen hoogstwaarschijnlijk beginnen in verkenningsrollen en dan overgaan in gevechten, troepen ondersteunen in plaats van ze te vervangen. Maar Crusher's geavanceerde autonomietechnologie is niet militair specifiek. De NREC voorziet – en heeft in de maak – onderzoeksprojecten die gebruik maken van de voor Crusher ontwikkelde systemen in civiele toepassingen. In een decennium, zagen we autonome voertuigen riskante taken uitvoeren in gebieden zoals landbouw, mijnbouw en bouw, uiteindelijk een deel van het gevaar waarmee mensen in deze velden worden geconfronteerd, wordt overgedragen aan vervangbare robotachtige tegenhangers die geen pijn voelen.
Voor meer informatie over Crusher, UGV's en aanverwante onderwerpen, bekijk de links op de volgende pagina.
Veel meer informatie
Gerelateerde HowStuffWorks-artikelen
- Hoe Bradley-gevechtsvoertuigen werken
- Hoe de Future Force Warrior zal werken
- Hoe M1-tanks werken
- Hoe militaire robots werken
- Hoe de Predator UAV werkt
Meer geweldige links
- DARPA:het LAGR-programma van DARPA
- Defensie Tech:DARPA's Smart, Gemeen, Offroad-drone
- Elektronisch ontwerp:Crusher laadt op naar het slagveld - helemaal vanzelf
- National Robotics Engineering Center:Crusher
- National Robotics Engineering Center:UGCV PerceptOR Integrated (UPI)
bronnen
- Boyle, Alan. "Robotic Crusher heeft zijn coming-out feest." MSNBC.com. 28 april 2006. http://www.msnbc.msn.com/id/12463820/
- "Carnegie Mellon's National Robotics Engineering Center onthult futuristische onbemande grondgevechtsvoertuigen." Carnegie Mellon Universiteit. 28 april 2006. http://www.rec.ri.cmu.edu/projects/crusher/Crusher_Press_Release.pdf
- "Breker." Nationaal Robotica Engineering Center, Carnegie Mellon Universiteit. http://www.rec.ri.cmu.edu/projects/crusher/index.htm
- Broedmachine-brochure. Carnegie Mellon:Het robotica-instituut. http://www.rec.ri.cmu.edu/projects/crusher/Crusher_Brochure.pdf
- "Crusher onbemand grondgevechtsvoertuig onthuld." Nieuwsdienst van het leger. 4 mei 2006. http://www4.army.mil/ocpa/print.php?story_id_key=8962
- "DARPA is slim, Gemeen, Off-road drone." Defense Tech. http://www.defensetech.org/archives/002367.html
- Erwin, Sandra I. "De volgende generatie robots:groter en beter?" Nationale Defensie. Juli 2006. http://www.nationaldefensemagazine.org/issues/2006/July/NextGenerationRobots.htm
- "FCS onbemande grondvoertuigen." GlobalSecurity.org. http://www.globalsecurity.org/military/systems/ground/fcs-ugv.htm
- Gawel, Richard. "Crusher bestormt het slagveld - helemaal alleen." Elektronisch ontwerp. http://www.elecdesign.com/Articles/ArticleID/12678/12678.html
- Jackel, Larry. "DARPA's LAGR- en UPI-programma's." DARPA. http://www.laas.fr/IFIPWG/Workshops&Meetings/49/workshop/06%20jackel.pdf
- Piquepaille, Roland. "Opkomende technologische trends." ZDNet-blogs. http://blogs.zdnet.com/emergingtech/?p=214
- "UGCV PerceptOR Integrated (UPI)." Nationaal Robotica Engineering Center, Carnegie Mellon Universiteit. http://www.rec.ri.cmu.edu/projects/upi/index.htm

Hoofdlijnen
- Wat doet de DNA-nucleotide volgorde code voor?
- De geleidbaarheid van zenuwcellen in het centrale zenuwstelsel
- De voordelen van Anaerobe Ademhaling
- Hoe een DNA-structuur te labelen
- Wat zijn dromen?
- Hoe Agarose Gel te interpreteren
- Wat is het dominante fenotype?
- Verschillen en overeenkomsten tussen Unicellular & Cellular
- Zal er ooit een gelukkige pil zijn?






 We weten eindelijk waarom tekenbeten allergieën voor rood vlees kunnen veroorzaken
We weten eindelijk waarom tekenbeten allergieën voor rood vlees kunnen veroorzaken- Hoe een Wave Machine te maken
- Hoe een John Deere 4020 van twee accu's naar een
- Jerry Lawson heeft de videogame-industrie voor altijd veranderd
- Dubbele ster
- Wat is de zeldzaamste metaal?
- Hoe converteer je HSFP naar COP?
- White Bird Egg Identification
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
