Wetenschap
Een robotplanner die reageert op natuurlijke taalcommando's
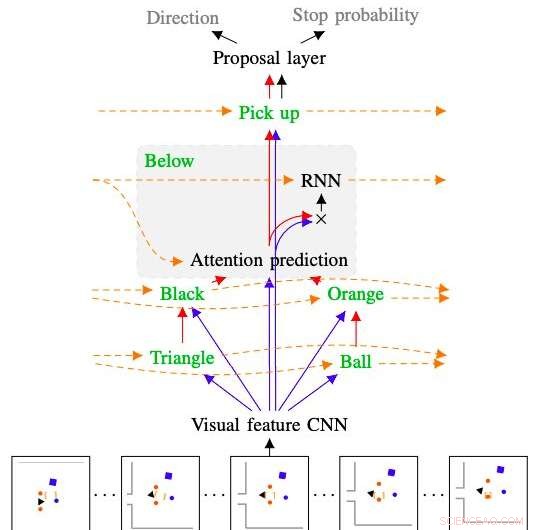
Figuur die laat zien hoe het door de onderzoekers ontwikkelde model het commando 'pak de oranje bal van onder de zwarte driehoek' interpreteert en volgt. Krediet:Kuo, Katz &Barbie.
In de komende jaren, robots kunnen menselijke gebruikers op verschillende manieren helpen, zowel wanneer ze thuis zijn als in andere omgevingen. Om intuïtiever te zijn, robots moeten opdrachten en instructies in natuurlijke taal kunnen volgen, omdat gebruikers hierdoor net zo met hen kunnen communiceren als met andere mensen.
Met dit in gedachten, onderzoekers van MIT's Center for Brains, Minds &Machines heeft onlangs een op steekproeven gebaseerde robotplanner ontwikkeld die kan worden getraind om reeksen van natuurlijke taalopdrachten te begrijpen. Het systeem dat ze ontwikkelden, gepresenteerd in een paper dat vooraf is gepubliceerd op arXiv, combineert een diep neuraal netwerk met een op steekproeven gebaseerde planner.
"Het is heel belangrijk om ervoor te zorgen dat toekomstige robots in onze huizen ons begrijpen, zowel om veiligheidsredenen als omdat taal de handigste interface is om te vragen wat je wilt, "Andrei Barbu, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Ons werk combineert drie onderzoekslijnen:robotplanning, diepe netwerken, en ons eigen werk over hoe machines taal kunnen begrijpen. Het algemene doel is om een robot slechts een paar voorbeelden te geven van wat een zin betekent en hem nieuwe commando's en nieuwe zinnen te laten volgen die hij nog nooit eerder heeft gehoord."
Het verreikende doel van het onderzoek van Barbu en zijn collega's is om de communicatie via lichaamstaal beter te begrijpen. In feite, terwijl de functies en mechanismen achter gesproken communicatie nu goed worden begrepen, de meeste communicatie die plaatsvindt tussen dieren en mensen is non-verbaal.
Een beter begrip van lichaamstaal zou kunnen leiden tot de ontwikkeling van effectievere strategieën voor robot-menselijke communicatie. Onder andere, de onderzoekers van MIT hebben dus de mogelijkheid onderzocht om zinnen te vertalen in robotbewegingen, en vice versa. Hun recente onderzoek is een eerste stap in die richting.

Krediet:Kuo, Katz &Barbie.
"Robotische planners zijn geweldig in het onderzoeken wat de robot kan doen en vervolgens de robot een actie laten uitvoeren, "Yen-Ling Kuo, een andere onderzoeker die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Ons werk duurt een zin, breekt het in stukjes, deze stukjes worden vertaald in kleine netwerken, die weer bij elkaar zijn gebracht."
Net zoals taal bestaat uit woorden die kunnen worden gecombineerd tot zinnen volgens grammaticale regels, de door Barbu ontwikkelde netwerken, Kuo en hun collega Boris Katz bestaan uit kleinere netwerken die zijn opgeleid om afzonderlijke concepten te begrijpen. Bij elkaar gecombineerd, deze netwerken kunnen de betekenis van hele zinnen blootleggen en weergeven.
De nieuwe robotplanner die door de onderzoekers is ontwikkeld, heeft twee belangrijke componenten. De eerste is een terugkerend hiërarchisch diep neuraal netwerk, die bepaalt hoe de planner de omgeving verkent, terwijl ze ook voorspellen wanneer een gepland pad waarschijnlijk een bepaald doel zal bereiken en de effectiviteit van elk van de mogelijke bewegingen van de robot afzonderlijk inschatten. De tweede is een op steekproeven gebaseerde planner die vaak wordt gebruikt in robotica-onderzoeken, snel verkennende willekeurige boom (RRT) genoemd.
"Het grote voordeel van onze planner is dat er weinig trainingsgegevens voor nodig zijn, " legde Barbu uit. "Als je een robot wilt leren, je gaat het thuis niet duizenden voorbeelden geven, maar een handvol is redelijk. Het trainen van een robot moet soortgelijke acties met zich meebrengen als die je zou doen als je een hond zou trainen."
Terwijl eerdere studies ook manieren onderzochten om robots te sturen via verbale commando's, de technieken die erin worden gepresenteerd zijn vaak alleen van toepassing op discrete omgevingen, waarin robots maar een beperkt aantal acties kunnen uitvoeren. De door de onderzoekers ontwikkelde planner, anderzijds, kan een verscheidenheid aan interacties met de omgeving ondersteunen, zelfs als het objecten betreft die de robot nog nooit eerder is tegengekomen.
"Als ons netwerk in de war is, het plannergedeelte neemt het over, uitzoekt wat te doen en dan kan het netwerk het overnemen de volgende keer dat het zeker weet wat te doen, " legt Kuo uit. "Het feit dat ons model uit onderdelen is opgebouwd, geeft het ook nog een andere wenselijke eigenschap:interpreteerbaarheid."
Wanneer ze een bepaalde taak niet kunnen voltooien, veel bestaande machine learning-modellen kunnen geen informatie geven over wat er is misgegaan en de problemen die ze tegenkwamen. Dit maakt het voor ontwikkelaars moeilijker om de tekortkomingen van een model te identificeren en gerichte wijzigingen in de architectuur aan te brengen. De deep learning-component van de robotplanner gemaakt door Barbu, Kuo en Katz, anderzijds, toont stap voor stap zijn redenering, verduidelijken wat elk woord dat het verwerkt over de wereld uitstraalt en hoe het de resultaten van zijn analyses heeft gecombineerd. Dit stelt de onderzoekers in staat om problemen op te sporen die ervoor zorgden dat een bepaalde actie in het verleden niet met succes werd voltooid en om wijzigingen in de architectuur aan te brengen die het succes ervan bij toekomstige pogingen zouden kunnen garanderen.
"We zijn erg enthousiast over het idee dat robots snel taal kunnen leren en snel nieuwe woorden kunnen leren met heel weinig hulp van mensen, ' zei Barbu. 'Normaal gesproken, deep learning wordt als zeer dataverslindend beschouwd; dit werk versterkt het idee dat wanneer je de juiste principes (compositionaliteit) inbouwt en agenten zinvolle acties laat uitvoeren, ze lang niet zoveel gegevens nodig hebben."
De onderzoekers evalueerden de prestaties van hun planner in een reeks experimenten, terwijl ook de prestaties worden vergeleken met die van bestaande RRT-modellen. Bij deze testen de planner verwierf met succes de betekenis van woorden en gebruikte wat hij leerde om reeksen zinnen weer te geven die hij nog nooit eerder was tegengekomen, beter presteren dan alle modellen waarmee het werd vergeleken.
In de toekomst, het model dat door dit team van onderzoekers is ontwikkeld, zou kunnen bijdragen aan de ontwikkeling van robots die natuurlijke taalcommando's effectiever kunnen verwerken en volgen. Momenteel, hun planner stelt robots in staat om eenvoudige instructies te verwerken en uit te voeren, zoals 'het bord van de tafel oppakken', maar is nog steeds niet in staat om de betekenis van complexere te vatten, zoals 'raap de pop op als deze op de grond valt en maak hem schoon'. Barbie, Kuo en Katz proberen dus momenteel het aantal zinnen dat de robot kan begrijpen uit te breiden.
"Ons doel voor de toekomst op langere termijn is om het idee van inverse planning te onderzoeken, " zei Kuo. "Dat betekent dat als we taal kunnen omzetten in robotacties, we konden dan ook acties bekijken en de robot vragen 'wat dacht iemand toen ze dit deden?' We hopen dat dit een sleutel zal zijn om lichaamstaal in robots te ontsluiten."
© 2020 Wetenschap X Netwerk
 Afstemmen op de LCD's van morgen:de nieuwe IGZO-11 halfgeleider verkennen
Afstemmen op de LCD's van morgen:de nieuwe IGZO-11 halfgeleider verkennen- Ingenieurs maken drugstesten efficiënter en betaalbaarder
- Nog een reden om van de gestreepte bas te houden:antimicrobiële middelen
- Wetenschappers synthetiseren loodvrije op zirkonium gebaseerde vacature-geordende dubbele perovskiet nanokristallen
- Wetenschappers onthullen potentiële afhankelijkheid van elektroreductie van stikstofmonoxide tot ammoniak
- Stiekeme onderwaterrobot bracht 18 dagen door met het opnemen van zeedieren en luidruchtige mensen
- Zuid-China ruimt op van overstromingen, maar onderweg meer regen
- Hoe doet de mist zich?
- Wetenschappers en filosoof slaan de handen ineen, een nieuwe manier voorstellen om mineralen te categoriseren
- Onderzoek suggereert dat vlees- en zuivelindustrie op schema ligt om oliemaatschappijen te overtreffen als grootste uitstoters van broeikasgassen
Hoofdlijnen
- Alles wat je nooit wilde weten over bedwantsen, en meer
- Mussenkuikens kunnen het nummer identificeren vanaf de openingsnoot
- Bacterieel controlemechanisme voor aanpassing aan veranderende omstandigheden
- De reden voor het kleuren van een exemplaar op de microscoop
- Nieuwe insectensoort bootst dode bladeren na voor camouflage
- The Anatomy of the Hydra
- Hoe verschillende mierensoorten in hetzelfde territorium naast elkaar bestaan
- De koning van de gewassen kronen:het genoom van de witte Guinea-yam bepalen
- Onderzoekers observeren enzymen die cellulose afbreken om de productie van biobrandstoffen te ondersteunen
- Baanbrekende resultaten met krachtige lasertechnologie om elektrische voertuigen te transformeren

- Smartphone-apps kunnen verbinding maken met kwetsbare backend-cloudservers
- Singapore zegt dat hackers 1,5 miljoen gezondheidsdossiers hebben gestolen in een record cyberaanval

- Amazon brengt 1, 700 banen naar Italië in 2018

- Actieve lichaamsperceptie toepassen op een humanoïde robot


 De vier typen vermenigvuldigingseigenschappen
De vier typen vermenigvuldigingseigenschappen - Wat is de deal met de nieuwe Tesla Cybertruck?
- Wetenschappers bedenken diervrije testen van dodelijke neurotoxines
- Hoe een sukkelweddenschap te vermijden - met een beetje hulp van wiskunde
- Droogte geen dingo's achter het uitsterven van tijgers op het vasteland van Australië:studie
- Veranderende technologie en kijkgewoonten kunnen Super Bowl-reclame in gevaar brengen
- Gedoteerde grafeen nanoribbons met potentieel
- Onderzoekers rapporteren omgekeerde magnesiumchemie-ontdekking
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway | Italian |

-
Wetenschap © https://nl.scienceaq.com
