Wetenschap
Actieve lichaamsperceptie toepassen op een humanoïde robot
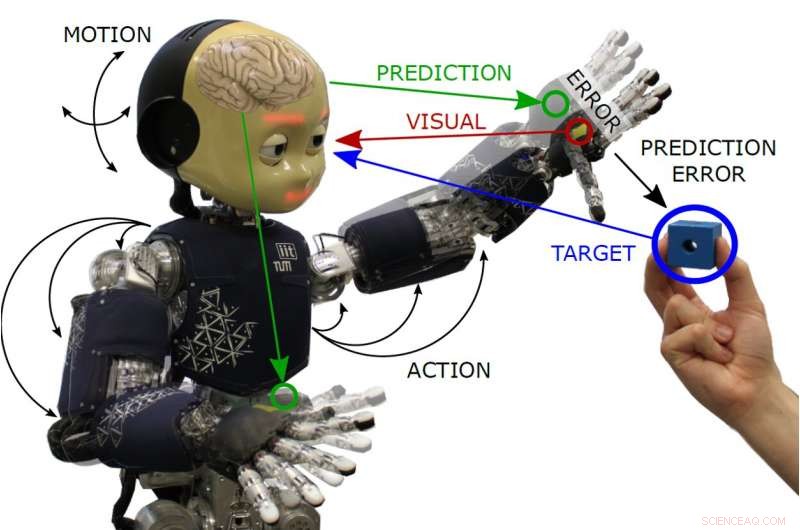
Krediet:Oliver, Lanillos en Cheng.
Een belangrijke uitdaging voor robotica-onderzoekers is het ontwikkelen van systemen die kunnen interageren met mensen en hun omgeving in situaties met verschillende mate van onzekerheid. In feite, terwijl mensen continu kunnen leren van hun ervaringen en hun lichaam als een geheel kunnen waarnemen terwijl ze met de wereld omgaan, robots hebben deze mogelijkheden nog niet.
Onderzoekers van de Technische Universiteit van München hebben onlangs een ambitieuze studie uitgevoerd waarin ze probeerden "actieve inferentie, " een theoretische constructie die het vermogen beschrijft om waarneming en actie te verenigen, tot een humanoïde robot. Hun studie maakt deel uit van een breder door de EU gefinancierd project genaamd SELFCEPTION, die robotica en cognitieve psychologie overbrugt met als doel meer opmerkzame robots te ontwikkelen.
"De oorspronkelijke onderzoeksvraag die tot dit werk leidde, was om humanoïde robots en kunstmatige agenten in het algemeen het vermogen te geven om hun lichaam waar te nemen zoals mensen dat doen, "Pablo Lanillos, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Het belangrijkste doel was om hun vermogen om te communiceren onder onzekerheid te verbeteren. Onder de paraplu van het Selfception.eu Marie Skłodowska-Curie-project hebben we in eerste instantie een routekaart gedefinieerd om enkele kenmerken van menselijke waarneming en actie in robots op te nemen."
In hun studie hebben Lanillos en zijn collega's probeerden de menselijke perceptie beter te begrijpen en modelleerden deze vervolgens in een humanoïde robot. Dit bleek een zeer moeilijke taak, zoveel details over hoe zintuiglijke informatie (visueel, tactiel, enz.) door mensen wordt verwerkt, zijn nog onbekend. De onderzoekers lieten zich inspireren door het werk van Hermann Von Helmholtz en Karl Friston, vooral uit hun theorie van actieve gevolgtrekking, wat een van de meest invloedrijke neurowetenschappelijke constructies is.
"In essentie, we stellen voor dat de robot voortdurend zijn lichaam benadert met behulp van zijn onvolmaakte geleerde modellen, "Gullermo Olivier, een andere onderzoeker die bij het onderzoek betrokken was, vertelde TechXplore. "Het algoritme, gebaseerd op het principe van vrije energie, presenteert perceptie en actie die werken voor een gemeenschappelijk doel:de voorspellingsfout verminderen. Bij deze benadering actie zorgt ervoor dat sensorische gegevens beter overeenkomen met de voorspelling van het innerlijke model."
Lanillos, Oliver en de Prof. Gordon Cheng waren de eersten die actieve gevolgtrekking toepasten op een echte robot. In feite, tot dusver, actieve inferentie werd alleen theoretisch getest of in simulaties die gedeeltelijk vertekend waren door de vereenvoudiging van de gebruikte modellen.
Hun benadering probeert het vermogen van mensen te reproduceren om hun acties (bijvoorbeeld hun manier van lopen) in bepaalde situaties te veranderen, bijvoorbeeld, wanneer ze een metroroltrap naderen, maar plotseling ontdekken dat het kapot of buiten dienst is, en passen hun bewegingen dienovereenkomstig aan. Het perceptie- en controle-algoritme ontwikkeld door Lanillos, Oliver en Cheng repliceren een soortgelijk mechanisme in robots.
Bijvoorbeeld, bij een reikende taak waarbij een robot een object moet aanraken, het model maakt een fout in de gewenste handlocatie die een actie in de richting van het object veroorzaakt. Het evenwicht (of minimalisatie) wordt verkregen wanneer de hand van de robot en het object zich op dezelfde locatie bevinden.
"Deze aanpak is zeldzaam in de robotica-gemeenschap, maar biedt handelbaarheid, maakt een combinatie mogelijk van sensorische informatie uit verschillende bronnen en maakt afstemming van de betrouwbaarheid van elke sensorinformatie mogelijk, afhankelijk van de precisie, ' zei Olivier.
De onderzoekers pasten hun algoritme toe op iCub, een open source cognitieve humanoïde robot die is ontwikkeld als onderdeel van een ander door de EU gefinancierd project, en evalueerde de prestaties bij taken waarbij twee armen reiken en actief hoofd volgen. In hun testen, de robot was in staat om geavanceerd en robuust reikgedrag uit te voeren, evenals actieve hoofdvolging van objecten in het gezichtsveld.
"De humanoïde robot was in staat om robuuste tweearmige reik- en visuele volgtaken van een object uit te voeren met behulp van hetzelfde wiskundige model, ' zei Oliver. 'Met dit type algoritme, we willen de huidige kijk op input-output perceptie-pijplijn (bijv. state-of-the-art neurale netwerken) veranderen door het idee van close-loop-perceptie af te dwingen, waar voorwaartse en achterwaartse passen online worden verwerkt, en inclusief actie als een andere onvermijdelijke variabele."
Lanillos, Oliver en Cheng zijn de eersten die een model implementeren op basis van het vrije-energieprincipe op een echte humanoïde robot. Hun bevindingen suggereren dat het valideren van dergelijke modellen in de echte wereld mogelijk is, net als het analyseren van de voordelen van deze modellen in de aanwezigheid van sensorische informatie met veel ruis, occlusies of wanneer slechts gedeeltelijke informatie beschikbaar is. De onderzoekers zijn nu van plan hun model toe te passen op andere robots en de generaliseerbaarheid ervan te testen.
"Op de lange termijn, we willen de ontwikkeling van kunstmatige middelen mogelijk maken met dezelfde mogelijkheden van lichaamsaanpassing en interactie als mensen, ' zei Lanillos. 'Ondertussen, we ontwikkelen nieuwe bio-geïnspireerde kunstmatige intelligentie-algoritmen. In de toekomst, we zullen dit model ook gebruiken om body-ownership en agency te onderzoeken, en wie weet, we kunnen ooit zelfherkenning in machines mogelijk maken."
© 2019 Wetenschap X Netwerk
 Licht schijnend op de dynamiek van de aangeslagen toestand in perovskietmaterialen
Licht schijnend op de dynamiek van de aangeslagen toestand in perovskietmaterialen- Nieuw materiaal kan helpen de batterijkosten voor elektrische auto's te verlagen, telefoons
- Wetenschappers vinden een kunstmatige neus uit voor continue bacteriële monitoring
- Onderzoekers ontwikkelen nieuwe methode om metaal te analyseren
- De oorsprong van smaakafwijkingen in uien
Hoofdlijnen
- Een driedimensionaal DNA-model maken voor de biologie van de middelbare school
Door een model van een DNA-helix in de klas te bouwen, kunnen studenten de constructie van DNA beter visualiseren en meer te weten komen over de levengevende genetische
- Hoe fotosynthese licht vangt en het leven op aarde aandrijft
- Nieuwe intermoleculaire oppervlaktekracht onthult actomyosine-aandrijfmechanisme
- Wat is Feedback-inhibitie en waarom is het belangrijk bij het reguleren van de enzymactiviteit?
- Lichaamsdelen en functies
- Wat zijn endorfines?
- De evolutionaire klok terugdraaien op een lichtgevoelig eiwit
- Onderzoekers brengen het menselijk genoom in 4-D in kaart terwijl het vouwt
- Kenmerken van Animal-like Protists
- Wetenschappers trainen robots om onafhankelijke beslissingen te nemen in een veranderende omgeving

- Fiat Chrysler remt op de fusie-aanbieding van Renault

- Alliantiegesprekken gaan door terwijl Ford, VW zegt gezamenlijk optreden in Detroit af

- Technologie om heteluchtballonnen te gebruiken voor raketlanceringen concurreert in een startup-slagveld

- Embraer-aandelen stijgen nadat Bolsonaro de fusie met Boeing goedkeurt


 Versnelde temperatuurstijging in de Pyreneeën
Versnelde temperatuurstijging in de Pyreneeën- Onderzoekers maken een netwerk van twee neuronen
- Hoe ver is de aarde van Venus?
- Waarom het nieuwe coronavirus een nachtmerrie op sociale media werd
- LOFAR pioniert met nieuwe manier om exoplaneetomgevingen te bestuderen
- De kenmerken van een parallel circuit
- Geven als vrouw:vrouwen doneren vaker aan goede doelen dan mannen met gelijke middelen
- Duitse luchtmacht weigert levering van twee Airbus-vliegtuigen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
