Wetenschap
Een nieuwe benadering van begeleid leren om planning in robots te begrijpen

Precisie (links) en kracht (rechts) grepen gegenereerd door de grijpplanner. Krediet:Lu &Hermans.
Onderzoekers van de Universiteit van Utah hebben onlangs een probabilistische grijpplanner ontwikkeld die expliciet grijptypen kan modelleren om hoogwaardige precisie- en krachtgrepen in realtime te plannen. Hun begeleide leeraanpak, geschetst in een paper dat vooraf is gepubliceerd op arXiv, kan effectief zowel kracht- als precisiegrepen plannen voor een bepaald object.
Voor zowel mensen als robots, verschillende manipulatietaken vereisen verschillende soorten grepen. Bijvoorbeeld, een zwaar gereedschap vasthoudend, zoals een hamer, vereist een meervingerige machtsgreep die stabiliteit biedt, terwijl het vasthouden van een pen een precisiegreep met meerdere vingers vereist, omdat dit de behendigheid van het object kan geven.
Bij het testen van hun eerdere aanpak om planning te begrijpen, het team van onderzoekers van de Universiteit van Utah merkte op dat het bijna altijd krachtgrepen genereert waarbij de hand van de robot zich om een object wikkelt, met grote contactgebieden tussen zijn hand en het object. Deze grepen zijn handig voor het voltooien van een verscheidenheid aan robottaken, zoals het oppakken van voorwerpen ergens anders in de kamer, toch zijn ze nutteloos bij het uitvoeren van manipulatietaken in de hand.
"Denk aan het verplaatsen van een penseel of scalpel die je vasthoudt met je vingertoppen, "Tuck Hermans, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Dit soort taken vereisen precisiegrepen, waar de robot het object met zijn vingertoppen vasthoudt. Kijkend naar de literatuur, we zagen dat bestaande methoden slechts één soort greep genereren, precisie of kracht. Dus gingen we op zoek naar een greep-synthese-aanpak die beide aankan. Op deze manier, onze robot kan krachtgrepen gebruiken om objecten die hij wil verplaatsen stabiel te kiezen en te plaatsen, maar precisie grijpt wanneer het manipulatietaken in de hand moet uitvoeren."
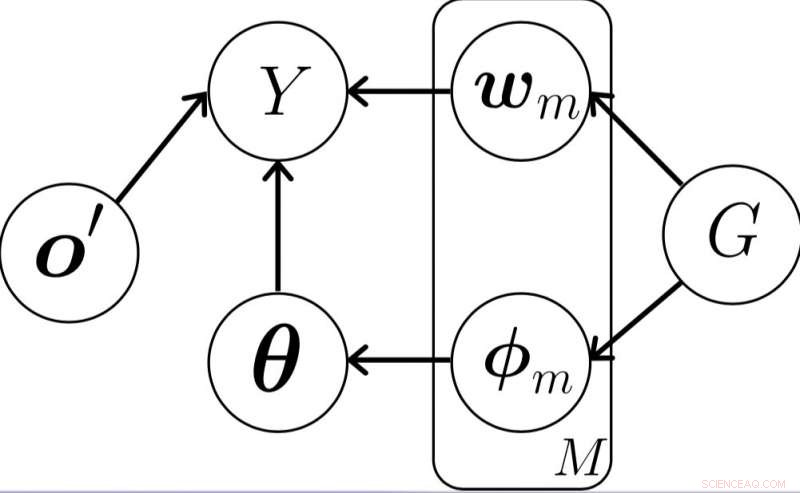
Het voorgestelde probabilistische grafische model van het grijptype. Krediet:Lu &Hermans.
In de aanpak om planning te begrijpen, bedacht door Hermans en zijn collega Qingkai Lu, een robot leert grijpsucces voorspellen uit ervaringen uit het verleden. De robot probeert verschillende soorten grepen op verschillende objecten, vast te leggen welke van deze succesvol waren en welke niet. Deze gegevens worden vervolgens gebruikt om een classifier te trainen om te voorspellen of een bepaalde greep zal slagen of niet.
"De classificator neemt als invoer een dieptebeeld van het object en de geselecteerde greepconfiguratie (d.w.z. waar de hand moet worden geplaatst en hoe de vingers moeten worden gevormd), Hermans legde uit. "Naast het voorspellen van succes, de classifier rapporteert hoe zeker het is dat de greep zal slagen op een schaal van nul tot één. Wanneer een object wordt aangeboden om te grijpen, de robot plant een greep door verschillende mogelijke grepen te doorzoeken en de greep te selecteren waarvan de classificator het grootste vertrouwen in slagen voorspelt."
De door Hermans en Lu ontwikkelde leermethode onder supervisie kan verschillende soorten grepen plannen voor voorheen onzichtbare objecten, zelfs wanneer slechts gedeeltelijke visuele informatie beschikbaar is. Die van hen zou de eerste planningsmethode kunnen zijn om zowel kracht- als precisiegrepen expliciet te plannen.
-
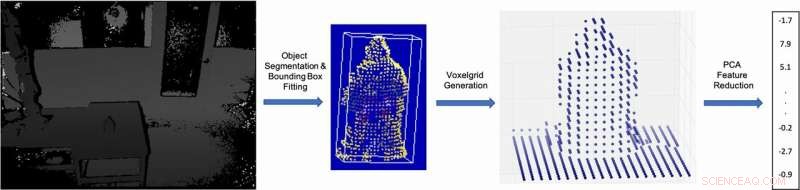
Illustratie van het extractieproces van visuele kenmerken. Krediet:Lu &Hermans.
-

Voorbeeld RGB-afbeelding gegenereerd door de Kinect2-camera met de robot en het Lego-achtige object op de tafel. Krediet:Lu &Hermans.
De onderzoekers evalueerden hun model en vergeleken het met een model dat geen grijptype codeert. Hun bevindingen suggereren dat het modelleren van het grijptype het succespercentage van gegenereerde grepen kan verbeteren, waarbij hun model beter presteert dan de andere methode.
"Wij geloven dat onze resultaten op twee betekenisvolle manieren belangrijk zijn, ' zei Hermans. 'Eerst, onze voorgestelde aanpak stelt een robot in staat om expliciet het soort greep te selecteren dat hij wenst, het oplossen van het probleem dat we wilden aanpakken. Tweede, en mogelijk nog belangrijker, door deze kennis van het grijptype aan het systeem toe te voegen, verbetert het vermogen van de robot om objecten met succes te grijpen. Dus, zelfs als je maar één soort greep wilt, zeggen macht grijpt, het helpt nog steeds om te weten dat precisiegrepen bestaan bij het leren grijpen."
De aanpak van Hermans en Lu zou kunnen helpen bij de ontwikkeling van robots die verschillende grepen kunnen genereren. Hierdoor zouden deze robots uiteindelijk een grotere verscheidenheid aan taken kunnen uitvoeren, die verschillende soorten objectmanipulatie met zich meebrengen.
-

Voorbeelden van succesvolle precisie- en machtsgrepen gegenereerd door de nieuwe modelleerbenadering van het grijptype om planning te begrijpen. De bovenste twee rijen zijn precisiegrepen. De onderste twee rijen zijn krachtgrepen. Krediet:Lu &Hermans.
-

Precisie (links) en kracht (rechts) grepen gegenereerd door de nieuwe grijpplanner. Krediet:Lu &Hermans.
"We kijken nu naar twee directe uitbreidingen van dit werk, ' zei Hermans. 'Eerst, we willen de effecten onderzoeken van het modelleren van meer soorten grepen, bijvoorbeeld, onderscheid maken tussen subtypes van precisiegrepen die worden gekenmerkt door verschillende vingersegmenten die contact maken met het object. Om dit te bereiken, we zijn van plan om de robothand uit te breiden met huid om automatisch te detecteren waar contacten worden gemaakt. Tweede, we willen meer informatie opnemen om te helpen bij het automatisch selecteren van het juiste type greep voor een gevraagde taak. Bijvoorbeeld, hoe kan de robot automatisch beslissen dat hij een precisiegreep moet gebruiken om een schilderij te maken, zonder dat de telefoniste het vertelt?"
© 2019 Wetenschap X Netwerk
 Nieuwe studie identificeert mogelijke voorouders van RNA
Nieuwe studie identificeert mogelijke voorouders van RNA- Massaspectrometrie gebruiken om guaninerijke DNA-ionen te isoleren
- Op zoek naar de kenmerken van bekroonde wijn
- Krachtige röntgenstralen ontsluiten geheimen van kristalvorming op nanoschaal
- 2 wetenschappers winnen Nobelprijs voor scheikunde voor tool voor genbewerking
- Mega-infrastructuurprojecten in Afrika, Azië en Latijns-Amerika geven vorm aan ontwikkeling
- After the Big One:het risico van naschokken begrijpen
- Laatste met ijs bedekte delen van de Noordelijke IJszee in de zomer kwetsbaar voor klimaatverandering
- Ingenieurs evalueren sneeuwdroogte over de hele wereld
- Kan zeewier gasachtige koeien op melkveebedrijven verlichten?
Hoofdlijnen
- Zijn gelukkige mensen aardiger?
- Wat zijn de 10 Major Body Systems?
- De droge gebieden van Californië zijn hotspots van plantendiversiteit
- Vogels zonder eigen broed helpen andere vogels met opvoeden, maar niet onbaatzuchtig
- Bioprocessing-ingenieurs winnen glucosinolaat uit oliezaadmeel
- Polygene eigenschappen: definitie, voorbeeld en feiten
- spijt,
- Garnalenvisserij in New England voor minstens een jaar gesloten
- Monitoring van microben om marsonauten gezond te houden
- Controleer uw instellingen als u niet wilt dat Google elke beweging volgt

- Rapport onthult fout in iVote-systeem dat werd gebruikt bij verkiezingen in New South Wales

- Team creëert interactieve, multisensorische VR-game

- Ryanair-voorzitter krijgt klap van aandeelhouder te midden van stakingen

- Schermlezer plus toetsenbord helpt blinden, slechtziende gebruikers bladeren door moderne webpagina's


 Blootstelling aan het milieu tijdens reizen
Blootstelling aan het milieu tijdens reizen- 007 autofabrikant Aston Martin kraamt in blitse £ 4,3 miljard London IPO (update)
- De vierkante meters in een driehoek berekenen
- Ingenieurs ontwikkelen een nieuwe biosensorchip voor het detecteren van DNA-mutaties
- Regenwaterretentievijvers beschermen het oppervlaktewater mogelijk niet tegen verontreiniging door strooizout
- Galaxy verzamelen brengt warmte
- Veel minder meren onder de Oost-Antarctische ijskap dan eerder werd aangenomen
- NASA telt de regen van Albertos op in het zuidoosten van de VS en Tennessee Valley
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
