Wetenschap
Adaptieve voortbeweging van kunstmatige microzwemmers
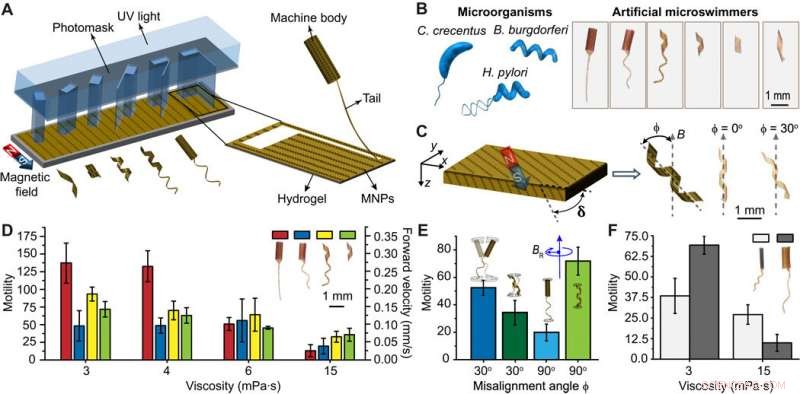
(A) Een kirigami-benadering voor het bouwen van massa-aangepaste zachte microzwemmers door middel van een eenstaps fotolithografie. UV, ultraviolet. (B) Schematische illustratie van de bacteriën die als inspiratiebron voor deze studie zijn genomen en de optische beelden van de kunstmatige kunstmatige microzwemmers. (C) Out-of-plane uitlijning (δ ≠ 0) van MNP's leiden tot niet-nul uitlijningshoek (ϕ). De optische afbeeldingen van twee zwemmers met identieke vormen en variërende ϕ worden getoond. (D) Een vergelijking van de beweeglijkheid van microzwemmers die in vloeistoffen met verschillende viscositeiten zwemmen. (E) Motiliteit van de gevlagde buisvormige microzwemmers en spiraalvormige microzwemmers gecodeerd met twee verschillende magnetische anisotropieën die roteren in een oplossing met een viscositeit van 3 mPa·s. (F) Effect van lichaamsgrootte op de beweeglijkheid van de buisvormige microzwemmers. De zwemmers werden in alle experimenten aangedreven op 2 Hz met een veldsterkte van 20 mT, tenzij anders vermeld. Alle staafdiagrammen vertegenwoordigen gemiddelde ± SEM (n =6 metingen voor elke microswimmer en drie verschillende geteste zwemmers per conditie). Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aau1532
Bacteriën vertonen opmerkelijke plasticiteit door gebruik te maken van mechanica als reactie op lokaal veranderende fysische en chemische omstandigheden. Conforme structuren helpen hun taxi's meestal om te navigeren in complexe en gestructureerde omgevingen. Biogeïnspireerde microbiologische mechanismen bevatten rationeel ontworpen architecturen die grote, niet-lineaire vervorming om autonomie te introduceren in ontworpen kleinschalige apparaten.
In een recente studie, HW Huang en collega's van de afdelingen werktuigbouwkunde, toegepaste wiskunde en theoretische natuurkunde, analyseerde de effecten van hydrodynamische krachten en reologie van de lokale omgeving op zwemmen bij een laag Reynoldsgetal. In productie, ze identificeerden de uitdagingen en voordelen van het gebruik van elasto-hydrodynamische koppeling in voortbeweging om een reeks machines te ontwikkelen om ongebonden microrobots met zelfregulerende mobiliteit te bouwen. De wetenschappers konden de koppeling aantonen tussen de structurele en magnetische eigenschappen van kunstmatige microzwemmers met de dynamische eigenschappen van de vloeistof, tijdens adaptieve voortbeweging bij afwezigheid van sensoren aan boord. De resultaten zijn nu gepubliceerd in wetenschappelijke vooruitgang .
Micro-organismen bevatten diverse machines voor moleculaire beweging om effectief door complexe omgevingen en ecologische niches te navigeren. Bij bacteriën, zwemmen komt voort uit de mechanische interacties tussen de geactiveerde flagella, cellichaam en de weerstand die door de stroom wordt gegenereerd. Viskeuze krachten bij een laag Reynoldsgetal zijn verantwoordelijk voor hydrodynamische weerstand, die op zijn beurt afhangt van de vorm van bewegende objecten.
Om hun beweeglijkheid te optimaliseren, bacteriën kunnen in de loop van hun levenscyclus afwisselende vormen en maten aannemen. Naast het veranderen van lichaamsvorm, bacteriën kunnen ook voortstuwingssystemen gebruiken voor geavanceerde bewegingen in complexe omgevingen. Bijvoorbeeld, door een haak te buigen kan Caulobacter crescentus de beweeglijkheid verbeteren, terwijl Vibrio alginolyticus beter kan presteren dan multi-flagellated Escherichia coli bij het beklimmen van voedingsgradiënten als gevolg van flagellaire knikinstabiliteit. Verder, Shewanella putrefaciens kan aan fysieke vallen ontsnappen via een polymorfe overgang in het flagellaire filament.
Microscopische kunstmatige zwemmers die onderzoekers ontwikkelden via bio-geïnspireerde micro-engineering om door lichaamsvloeistoffen te bewegen, over biologische barrières heen en toegang tot afgelegen plaatsen van ziekte zou een revolutie teweeg kunnen brengen in gerichte therapieën. Baanbrekend werk in het veld heeft al de haalbaarheid aangetoond van het nabootsen van het prokaryotische of eukaryote flagellum om magnetisch gestuurde microzwemmers te bouwen met niet-wederkerige beweging. Echter, in tegenstelling tot levende cellen, deze mechanische apparaten kunnen hun lokale omgeving niet waarnemen of zich aanpassen aan veranderingen in fysieke omstandigheden. Het beheersen van kunstmatige materialen kan de weg vrijmaken voor het bouwen van afstembare, duurzame en robuuste technische oplossingen zoals autonome biohybride robotapparaten.
In het huidige werk, Huong et al. introduceert een eenvoudige en veelzijdige methode op basis van materiaalfabricage om magnetisch gestuurde zachte micromachines te ontwikkelen. Het concept is gebaseerd op een 3D herconfigureerbaar multibody-systeem dat is ontwikkeld uit een monolaag van nanocomposiet hydrogel. In eerder werk uitgevoerd door dezelfde onderzoeksgroep, Huang et al. gedetailleerd de vorm en het magnetisatieprofiel van zelfgevouwen micromachines waarin structuren onafhankelijk kunnen worden geprogrammeerd door magnetische nanodeeltjes (MNP's) op te nemen in hydrogellagen met patronen.
Voor deze studie is de wetenschappers presenteerden een reeks ontwerpstrategieën om beweging en manoeuvreerbaarheid zelf te reguleren via het samenspel tussen viskeuze, elastisch, magnetische en osmotische krachten. Huang et al. toonde aan dat het herconfigureerbare lichaam continu kon veranderen volgens de omringende vloeistof, waardoor beweging door vernauwingen mogelijk wordt voor verbeterde locomotiefprestaties. Ze toonden aan dat elasto-hydrodynamische koppeling in vormveranderende en loopaanpassingen microbots in staat zou kunnen stellen om belemmerd te navigeren, heterogene en dynamische omgevingen.
De rol van het lichaamsplan op de wendbaarheid. Spiraalvormige microzwemmers vertoonden de beste prestaties zoals verwacht omdat ze geen rekening houden met lichaams- en staartcoördinatie. Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aau1532.
Huang et al. ontwierp de zachte microzwemmers met behulp van bio-geïnspireerde voortbeweging met een variant van origami die bekend staat als kirigami. De volgzame 3D-microstructuren zijn ontworpen op basis van een thermoresponsieve gel versterkt met MNP's (magnetische nanodeeltjes). Tijdens het fabricageproces, de wetenschappers begonnen met snijden via fotolithografie en vouwen na hydratatie van de gepolymeriseerde laag. De niet-uniforme verdeling van MNP's langs de dikterichting maakte de vorming mogelijk van twee verschillende lagen hydrogels met significant verschillende zwelverhoudingen.
De onderzoekers richtten zich op drie configuraties van micro-organismen, waaronder C. crecentus, Helicobacter pylori en Borrelia burgdorferi. De bacteriën zwemmen meestal door propellerachtige flagellaire filamenten te roteren die zich uitstrekken vanuit het cellichaam. Door biomimicry van de beweging kunnen kunstmatige microzwemmers bewegen, als het magnetische moment van de machine loodrecht op zijn lange as stond. Echter, de structuren leken in plaats daarvan op kompasnaalden, door hun lange as uit te lijnen met de richting van het externe magnetische veld. Om deze beperking te overwinnen, Huang et al. varieerden de out-of-plane uitlijning van de aangeboren MNP's in het materiaal, terwijl de uitlijning van de deeltjes in het vlak constant blijft.
Dynamisch opnemen van het magnetisatieprofiel. Magnetisch versterkte nanocomposieten waren in een andere richting dan de richting van MNP-uitlijning. Het aangelegde veld was significant hoger dan het magnetische veld dat werd toegepast om deeltjes uit te lijnen tijdens de fabricage van de microbots. Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aau1532.
Om beweging bij verschillende viscositeiten te optimaliseren, de microstructuren kregen verschillende gangen. Om systematisch het potentiële voordeel van morfologische diversiteit te onderzoeken Huong et al. bouwden microzwemmers met verschillende lichaamsplannen en activeerden ze in vloeistoffen met variërende viscositeit. De wetenschappers waren in staat microzwemmers te ontwerpen die 3D-helixbanen volgden door hun morfologie af te stemmen op hun magnetisatieprofiel. Bij alle experimenten het Reynoldsgetal varieerde van 10 -2 tot 10 -4 ; om het zwemmen onder laminaire stroming aan te geven.
In een oplossing van sucrose met dezelfde viscositeit als bloed, de gevlagde microzwemmers met een flexibele vlakke staart en buisvormig lichaam bewogen sneller door spiraalvormige beweging in vergelijking met andere prototypes. Gevlagde microzwemmers profiteerden van zowel spiraalvormige als kurkentrekkerbeweging, terwijl spiraalvormige microzwemmers een kurkentrekkerbeweging uitvoerden. Echter, tijdens verhoogde viscositeit nam de beweging van alle microzwemmers af, maar de daling was het grootst voor gegeselde microzwemmers met een vlakke staart. Bij hogere viscositeit, Huong et al merkten op dat spiraalvormige microzwemmers de snelste waren, aangezien de enige relevante beweging onder de omstandigheden de beweging van de kurkentrekker was.
Naast beweging, het vermogen om beweging te reguleren (manoeuvreerbaarheid) speelt een sleutelrol bij bacteriën om nutriëntengradiënten waar te nemen en te detecteren. De wetenschappers testten de manoeuvreerbaarheid van kunstmatige microzwemmers door tijdens het zwemmen doorbuigingen in de gierhoek (rotatie) te induceren. Een zeer wendbare microzwemmer kan snel van bewegingsrichting veranderen met een kleine verandering in het stuursignaal. Tijdens sterkere verstoringen (gierrotatie van 45 graden) speelden zowel de lichaams- als de staartgeometrie een belangrijke rol in de reactie van meegaande microzwemmers. structureel, het lichaam reageerde op het stuursignaal voor de staart, omdat de magnetisatie van het lichaam hoger was. Zwemmers met een vlakke staart waren meer vatbaar voor instabiliteit, een spiraalvormige staart zou relatief kunnen bijdragen aan stabilisatie vanwege de hogere stijfheid van de spiraalvormige geometrie.
Vormaanpassing in gebogen kanalen onder axiale stroming met een snelheid van 2 ml/min. De waargenomen vervorming was elastisch, en zwemmers herstelden volledig hun vorm na het passeren van de hoek onder de uitwendig aangebrachte stroom met een snelheid van 2 ml/min. Het verhogen van de stijfheid van de filamenten verminderde vervorming en leidde tot obstructie van het kanaal. Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aau1532. 
Huong en collega's bepaalden de voortstuwingsefficiëntie van meegaande zwemmers door koppeling tussen de magnetische krachten, filamentflexibiliteit en viskeuze weerstand. Ze onderzochten de elasto-hydrodynamische eigenschappen om een gangovergang teweeg te brengen als reactie op veranderende viscositeit. De wetenschappers observeerden het oprollen van de staart van de microbot met een hogere viscositeit en frequentie. De waargenomen morfologische overgang of transformatie, bijgedragen aan de beweging van de kurkentrekker voor verbeterde beweeglijkheid van microbots.

Gangaanpassing van buisvormige microzwemmers met een elastische staart. Elastohydrodynamische eigenschappen kunnen worden benut om een gangovergang op gang te brengen als reactie op veranderingen in lage en hoge viscositeit. Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aau1532.
Gebaseerd op uitgebreide strategieën van beweging en manoeuvreerbaarheid, de in het onderzoek verkregen gegevens lieten zien dat een buisvormig lichaam met een vlakke staart de voorkeur had om met een lage viscositeit te zwemmen. Ter vergelijking, een spiraalvormige morfologie zou beter kunnen presteren bij een hogere viscositeit. Huong et al. construeerde een magnetisch herconfigureerbare microzwemmer om vormtransformatie tussen de twee configuraties te ondergaan op basis van externe omstandigheden. De geprogrammeerde microzwemmers konden van vorm veranderen voor aanhoudende voorwaartse snelheid en verbeterde manoeuvreerbaarheid ondanks verhoogde viskeuze krachten.
Op deze manier, zorgvuldige analyses van zwemprestaties bij verschillende viscositeiten leverden een richtlijn op om een enkele micromachine te bouwen. Om het navigatieprobleem op micro/nanoschaal op te lossen, Huong et al. verminderde het aantal te controleren elementen voor de resulterende voordelen van snelheid, veelzijdigheid en kosten. De microbots kunnen worden vervaardigd via hoge doorvoer en schaalbare methoden om deuren te openen voor de ontwikkeling van een reeks zachte microrobots voor medische en industriële toepassingen.
© 2019 Wetenschap X Netwerk
 Wat zijn de drie algemene lipidecategorieën?
Wat zijn de drie algemene lipidecategorieën? - Kunstmatige fotosynthese zet koolstofdioxide om in vloeibare brandstoffen
- Nieuwe structurele faseovergang kan de toepasbaarheid van fotogevoelige vaste stoffen verbreden
- De effecten van temperatuur op enzymactiviteit en biologie
- Onderzoekers ontwikkelen nieuwe chemie om smartdrugs slimmer te maken
Hoofdlijnen
- Archaea: Structure, Characteristics & Domain
- De structuur die het cytoplasma in een bacteriecel omringt
- Het motoreiwit danst in al onze cellen
- Wat zijn drie dingen die bepalen of een molecuul in een celmembraan kan diffunderen?
- Projectideeën om het menselijk spijsverteringssysteem op de middelbare school voor studenten te laten zien
- Hoe virussen de manier veranderen waarop we naar evolutie kijken
- Ontrafelen wat genomics kan doen
- Studie van keverflagellum biedt mogelijke manier om medische hulpmiddelen te verbeteren
- Onderzoek levert test op om bittere pitstoornis in Honeycrisp-appels te voorspellen
- Machine learning gebruiken om cybercriminelen op te sporen

- Bayer verkoopt $ 9 miljard aan landbouwactiviteiten voorafgaand aan de fusie met Monsanto

- Tesla snijdt 9 PCT. van het personeelsbestand in een poging om winst te boeken

- Waarom gemodificeerde koolstofnanobuisjes kunnen helpen bij het reproduceerbaarheidsprobleem?
- Het internet is aan het rotten:duizenden sites gaan elk jaar offline


 Hoe maak je een Vitamine C-indicator
Hoe maak je een Vitamine C-indicator- Bestelling verborgen in wanorde
- Onderzoeker bespreekt de toekomst van technologie voor ruimteverkenning
- Geothermische centrale veroorzaakte aardbeving in Zuid-Korea
- Onderzoek naar kwantumcorrelaties van klassieke lichtbronnen voor beeldtransmissie
- Het opruimen van giftige Italiaanse staalfabrieken is een torenhoge taak
- Zuurstofverlies in de kust van de Oostzee is ongekend ernstig
- De zoektocht naar efficiëntie in thermo-elektrische nanodraden
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
