Wetenschap
Mistrobotica:een nieuwe benadering om efficiënte en vloeiende interactie tussen mens en robot te bereiken
Krediet:Chand Gudi et al.
Onderzoekers van het Innovation and Enterprise Research Laboratory (The Magic Lab) van de University of Technology Sydney hebben een nieuwe robotica-architectuur voorgesteld, genaamd fog robotics (FR). Hun aanpak, geschetst in een paper dat vooraf is gepubliceerd op arXiv, maakt gebruik van de sterke punten van fog computing, een gedecentraliseerde computerstructuur waarin bronnen en gegevens tussen hun bron en de cloud worden geplaatst.
In de komende jaren, robots zullen waarschijnlijk wijdverbreide adoptie bereiken in verschillende omgevingen, inclusief woningen, zorginstellingen, en verschillende industrieën. Actieve communicatie is een sleutelfactor achter effectieve mens-robotinteractie en onderzoekers wereldwijd proberen daarom nieuwe strategieën te bedenken die de manier waarop robots communiceren kunnen verbeteren.
Met cloudrobotica (CR) kunnen robots uitgebreide berekeningen in de cloud uitvoeren door kaarten te delen, afbeeldingen, gegevens, activiteiten, verwerkingskracht en andere online bronnen. Echter, vanwege de enorme vraag naar data en verkeer, CR brengt ernstige latentieproblemen met zich mee, vooral in robot-mens interacties.
"Het idee van mistrobotica kwam in me op na het zien van een hoge latentie in de communicatie van een robot, zowel in zijn antwoorden als in het bereiken van zijn doel, "Siva Leela Krishna Chand Gudi, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "We vroegen ons af wat er in de nabije toekomst zou kunnen gebeuren, wanneer robots overal zullen dienen, aangezien deze vertraging waarschijnlijk zal toenemen. Door de kenmerken van mistcomputing over te nemen en cloudrobotica onze metgezel te maken, we hebben de term mistrobotica geïntroduceerd en bedacht, eerste op de IROS 2017-conferentie."
Het hoofddoel van het onderzoek dat door Gudi en zijn collega's werd uitgevoerd, was het leveren van robuuste, vloeiende en efficiënte mens-robot interacties met lage latentie. De onderzoekers wilden robots ook laten communiceren en samenwerken met mensen terwijl ze tegelijkertijd taken uitvoeren, het delen van hun resultaten of activiteiten binnen dezelfde familie van robots. Dit zou uiteindelijk van robots partners maken die de behoeften van mensen met wie ze omgaan, begrijpen. snel en efficiënt reageren.
Krediet:Chand Gudi et al.
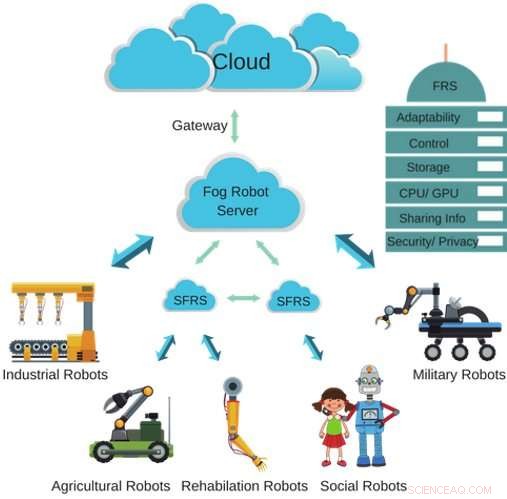
Om de problemen in verband met CR aan te pakken, de onderzoekers hebben een nieuwe robotica-architectuur voorgesteld en gedefinieerd, genaamd fog robotics (FR), bestaande uit berging, netwerkfuncties, en gedecentraliseerd computergebruik dat dichter bij robots staat. FR heeft drie hoofdcomponenten:de submistrobotserver, de mistrobotserver, en de wolk.
Een robot stuurt een verzoek om informatie naar het FR-systeem, in eerste instantie om overdrachten aan de sub fog robot-server te vragen. Als deze server het verzoek effectief kan aanpakken, het geeft de gevraagde informatie door aan de robot; als het niet kan, het zoekt hulp bij de mistrobotserver. Als deze server het verzoek ook niet kan verwerken, het vraagt om hulp van de cloud, die meestal het verzoek oplost en de informatie doorgeeft aan de robot.
De voordelen van deze aanpak zijn onder meer een snelle respons, lage latentie, verbeterde computermogelijkheden, lager energieverbruik, goedkopere hardware, en minder zorgen over beveiliging of privacy. Met andere woorden, FR kan leiden tot robuuste en snellere interacties tussen mens en robot, terwijl ook de levensduur van de batterij van de robot wordt verlengd.
"Op basis van de gemiddelde vertraging van een sociale robotpaprika en een setup van FRS/Cloud, we beschouwden een waarde van latentie, Gudi zei. "Later onderzochten we onze huidige methodologieën op een simulatieplatform, het evalueren van hun potentiële effecten wanneer het aantal robots toeneemt. We hebben bewezen dat FR een lage latentie biedt en in de toekomst een essentiële rol zou kunnen spelen, steeds een aanvulling op CR."
In een reeks eerste evaluaties, FR bereikte veel snellere responspercentages dan CR-benaderingen. De onderzoekers zijn van mening dat het onafhankelijk kan worden gebruikt of geïntegreerd met CR, de belasting van de cloud verminderen en de kwaliteit van de dienstverlening (QoS) verbeteren.
Krediet:Chand Gudi et al.
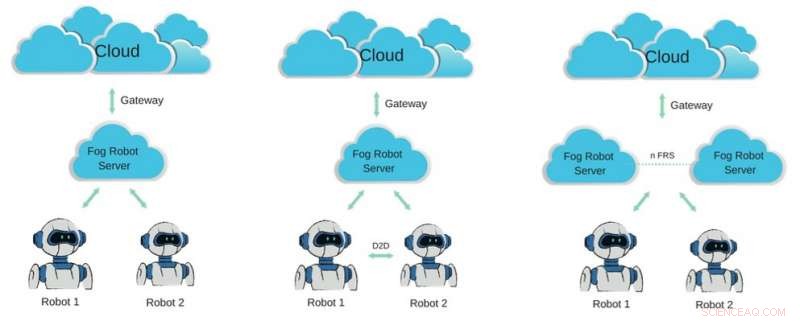
"Wij mensen zoeken hulp van anderen wanneer we informatie nodig hebben, maar robots zijn beperkt tot de taken waarvoor ze zijn voorgeprogrammeerd, " legde Gudi uit. "FR staat ook toe dat een robot zijn gegevens deelt met een andere robot."
Om dit punt beter uit te leggen, Gudi gaf een voorbeeld van hoe meerdere robots mensen kunnen helpen op een luchthaven. In het door hem beschreven scenario een reiziger zou aan een robot vragen waar zijn/haar vertrekgate zich bevindt. De robot zou de reiziger naar de roltrap leiden en de taak dan overdragen aan een tweede robot, die aan de andere kant van de roltrap zou wachten.
Om hem/haar te herkennen als ze het andere uiteinde van de roltrap naderen, deze tweede robot zou informatie over de naam van de persoon nodig hebben, identiteit, geslacht en hoe ze eruit zien. In deze situatie, FR zou deze twee robots in staat stellen samen te werken aan de taak en met elkaar te communiceren, snel de informatie uitwisselen die nodig is om de taak te voltooien.
"Evenzo, FR-technieken zouden kunnen worden toegepast op universiteiten, metro's, industriële robots, en de lijst gaat maar door, verschillende gebieden van robotica bereiken, ' zei Gudi. 'Uiteindelijk, FR leidt tot robuuste mens-robot interactie met lage latentie, terwijl ook persoonlijke gegevens worden beveiligd door deze op te slaan in de mistrobotserver."
De onderzoekers hebben een aantal aanvullende analyses uitgevoerd, die ze binnenkort online zullen publiceren. Ze zijn ook van plan om de effectiviteit van FR te testen bij RoboCup in Sydney, waar verschillende robots in het wild zullen strijden.
© 2018 Wetenschap X Netwerk
 Chitinase als verbrande brug Brownse monorail die op efficiënte wijze recalcitrante biomassa hydrolyseert
Chitinase als verbrande brug Brownse monorail die op efficiënte wijze recalcitrante biomassa hydrolyseert- De kleverige wetenschap van onderwaterlijmen
- Chemische sondes maken de weg vrij voor een beter begrip van de ontwikkeling van ziekten
- 3D-geprint apparaat vindt naald in hooiberg kankercellen door hooi te verwijderen
- Onderzoekers rapporteren nieuw platform voor stereocontrole
Hoofdlijnen
- Welke sequenties zorgen ervoor dat DNA uitpakt en ademt?
- Boek beschrijft alle 451 families van bloeiende planten, varens, lycopoden en naaktzadigen
- Hoe groeit schimmel op brood?
- Leef snel, sterf jong:signaaldetectietheorie bijwerken
- Welke soorten moleculen kunnen door het plasmamembraan worden gevoerd door eenvoudige diffusie?
- Wereldwijd onderzoeksteam vult taalkloof in plantenwetenschap
- Net als doorgewinterde vakantieliefhebbers, majoid krabben versieren hun schelpen
- Stadia van een typische celcyclus
- De voordelen van het bestuderen van cellen onder een lichtmicroscoop
- NADINE:energieopslag op energiecentraleschaal

- Japanse SoftBank investeert in WeWork voor het delen van kantoorruimte in de VS

- De elektrische voertuigrevolutie zal uit China komen, niet de VS

- Nieuwe oplossing voor een GPS-dode hoek voor een veiligere en slimmere rijervaring in wegennetwerken met meerdere niveaus
- Firefox Reality-browser plus Oculus Quest zijn koning en koningin van het bal


 Spindynamiek van grafeen verklaard door supercomputing
Spindynamiek van grafeen verklaard door supercomputing- Nieuwe studie richt zich op geheimen van grote ondernemende steden
- Luchtmacht mysterie ruimtevliegtuig landt, eindigt 2-jarige missie
- Wat zijn de aanpassingen van de Hibiscusplant?
- Wetenschappers stellen een nieuwe methode voor om fusiereacties te beheersen
- Politieke partijen die minder geïnteresseerd zijn in een kwestie, zullen eerder radicaal standpunt innemen
- Recent rapport van National Academies brengt de rechten van onderzoeksdeelnemers in gevaar, zeggen wetgeleerden
- Onze weerbaarheid tegen natuurbranden heroverwegen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Spanish | Portuguese | Swedish | German | Dutch | Danish | Italian | Norway |

-
Wetenschap © https://nl.scienceaq.com
