Wetenschap
Het eerste draadloos vliegende robotinsect stijgt op
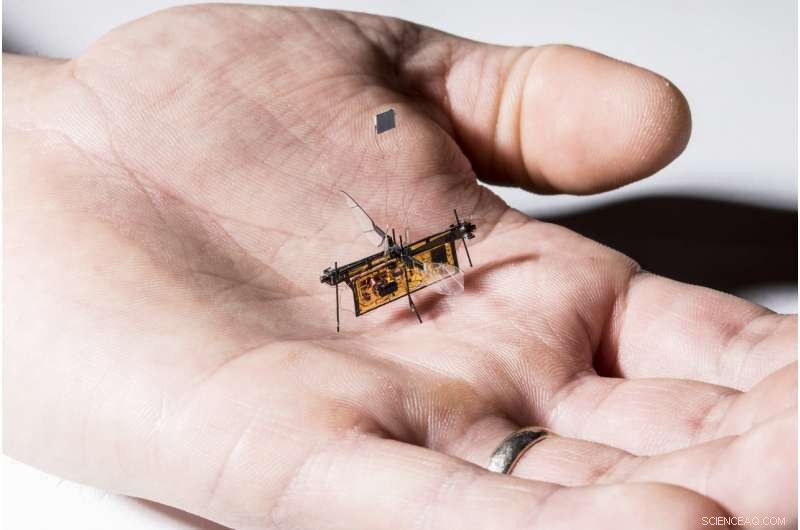
RoboFly, de eerste draadloze vliegende robot ter grootte van een insect, is iets zwaarder dan een tandenstoker. Credit:Mark Stone/Universiteit van Washington
Vliegende robots ter grootte van een insect kunnen helpen bij tijdrovende taken zoals het in kaart brengen van de gewasgroei op grote boerderijen of het opsporen van gaslekken. Deze robots vliegen door met kleine vleugels te fladderen omdat ze te klein zijn om propellers te gebruiken, zoals die op hun grotere drone-neven. Klein formaat is voordelig:deze robots zijn goedkoop te maken en kunnen gemakkelijk op krappe plaatsen glippen die ontoegankelijk zijn voor grote drones.
Maar de huidige vliegende robo-insecten zijn nog steeds aan de grond vastgebonden. De elektronica die ze nodig hebben om hun vleugels aan te drijven en te besturen, is te zwaar voor deze miniatuurrobots om te dragen.
Nutsvoorzieningen, ingenieurs van de Universiteit van Washington hebben voor het eerst het snoer doorgesneden en een brein toegevoegd, waardoor hun RoboFly zijn eerste onafhankelijke flappen kan nemen. Dit kan een kleine flap zijn voor een robot, maar het is een grote sprong voor robot-soort. Het team zal zijn bevindingen op 23 mei presenteren op de International Conference on Robotics and Automation in Brisbane, Australië.
RoboFly is iets zwaarder dan een tandenstoker en wordt aangedreven door een laserstraal. Het maakt gebruik van een klein circuit aan boord dat de laserenergie omzet in voldoende elektriciteit om zijn vleugels te bedienen.
"Voor nu, het concept van draadloze vliegende robots ter grootte van een insect was sciencefiction. Zouden we ze ooit kunnen laten werken zonder dat er een draad nodig is?" zei co-auteur Sawyer Fuller, een universitair docent bij de afdeling Werktuigbouwkunde van de UW. "Onze nieuwe draadloze RoboFly laat zien dat ze veel dichter bij het echte leven staan."
De technische uitdaging is het klapperen. Het klapperen van de vleugels is een energieverslindend proces, en zowel de krachtbron als de controller die de vleugels bestuurt, zijn te groot en omvangrijk om aan boord van een kleine robot te rijden. Dus Fuller's vorige robo-insect, de RoboBee, had een riem - het kreeg stroom en controle via draden van de grond.
Maar een vliegende robot moet zelfstandig kunnen opereren. Fuller en team besloten om een smalle onzichtbare laserstraal te gebruiken om hun robot aan te drijven. Ze richtten de laserstraal op een fotovoltaïsche cel, die boven RoboFly is bevestigd en het laserlicht omzet in elektriciteit.
"Het was de meest efficiënte manier om snel veel kracht naar RoboFly te sturen zonder veel gewicht toe te voegen, " zei co-auteur Shyam Gollakota, een universitair hoofddocent aan de Paul G. Allen School of Computer Science &Engineering van de UW.
Nog altijd, de laser alleen levert niet genoeg spanning om de vleugels te bewegen. Daarom ontwierp het team een circuit dat de zeven volt die uit de fotovoltaïsche cel komt, opvoerde tot 240 volt die nodig is om te vliegen.

Om RoboFly van stroom te voorzien, richtten de ingenieurs een onzichtbare laserstraal (hier weergegeven in rode laser) op een fotovoltaïsche cel, die boven de robot wordt bevestigd en het laserlicht omzet in elektriciteit. Credit:Mark Stone/Universiteit van Washington
Om RoboFly controle over zijn eigen vleugels te geven, de ingenieurs zorgden voor een brein:ze voegden een microcontroller toe aan hetzelfde circuit.
"De microcontroller werkt als het brein van een echte vlieg en vertelt de vleugelspieren wanneer ze moeten vuren, " zei co-auteur Vikram Iyer, een promovendus bij de faculteit Elektrotechniek UW. "Op RoboFly, het vertelt de vleugels dingen als 'flap nu hard' of 'flap niet.'"
specifiek, de controller zendt spanning in golven om het fladderen van de vleugels van een echt insect na te bootsen.
"Het gebruikt pulsen om de golf vorm te geven, " zei Johannes Jacobus, de hoofdauteur en een doctoraalstudent werktuigbouwkunde. "Om de vleugels snel naar voren te laten klappen, het zendt een reeks pulsen snel achter elkaar uit en vertraagt het pulseren als je in de buurt van de top van de golf komt. En dan doet het dit in omgekeerde richting om de vleugels soepel de andere kant op te laten klapperen."

Om RoboFly draadloos te maken, de ingenieurs ontwierpen een flexibel circuit (geel) met een boost-converter (koperen spoel en zwarte dozen links) die de zeven volt die uit de fotovoltaïsche cel komt, verhoogt tot de 240 volt die nodig is voor de vlucht. Dit circuit heeft ook een microcontroller-brein (zwarte vierkante doos in de rechterbovenhoek) waarmee RoboFly zijn vleugels kan besturen. Credit:Mark Stone/Universiteit van Washington
Voor nu, RoboFly kan alleen opstijgen en landen. Zodra de fotovoltaïsche cel uit de directe zichtlijn van de laser is, de robot raakt leeg en landt. Maar het team hoopt binnenkort de laser te kunnen sturen zodat RoboFly kan zweven en rondvliegen.
Terwijl RoboFly momenteel wordt aangedreven door een laserstraal, toekomstige versies kunnen kleine batterijen gebruiken of energie halen uit radiofrequentiesignalen, zei Gollakota. Op die manier, hun stroombron kan worden aangepast voor specifieke taken.
Toekomstige RoboFlies kunnen zich ook verheugen op meer geavanceerde hersenen en sensorsystemen die de robots helpen om zelfstandig te navigeren en taken uit te voeren, zei Fuller.
"Ik zou er graag een maken die methaanlekken vindt, "zei hij. "Je zou er een koffer vol mee kunnen kopen, Maak het open, en ze zouden rond uw gebouw vliegen op zoek naar gaspluimen die uit lekkende leidingen komen. Als deze robots het gemakkelijk kunnen maken om lekken te vinden, ze zullen veel waarschijnlijker worden opgelapt, wat de uitstoot van broeikasgassen zal verminderen. Dit is geïnspireerd op echte vliegen, die echt goed zijn in rondvliegen op zoek naar stinkende dingen. Dus we denken dat dit een goede toepassing is voor onze RoboFly."
 Het effect van wegzout op het milieu
Het effect van wegzout op het milieu- Nieuwe Londense vervuilingsbelasting wordt van kracht
- Onderzoek laat zien hoe exploitanten van skitoerisme hun winst kunnen beschermen in het licht van klimaatverandering
- 6 moeilijke feiten over titanium
- Langetermijnstudie onthult voordelen voor de volksgezondheid door vermindering van luchtvervuiling
Hoofdlijnen
- Wat is de chemische vergelijking voor aërobe ademhaling?
- Belang van aërobe celbeademing
- Pangolin-handel dwingt Ghana om naar nieuwe natuurwetten te kijken
- Who Discovered Ribosomes Structure?
- Wanneer werden DNA-testen het eerst gebruikt?
- The Anatomy of the Hydra
- Pharmacy Research Topics
- Vroegtijdige waarschuwing gezondheids- en welzijnssysteem kan boeren miljoenen ponden besparen
- Er is een gemakkelijke manier om mitose en meiose te begrijpen
- Online technologie verandert de dynamiek van het geven van geschenken

- Wereldwijde vraag naar vliegtuigpassagiers daalt het sterkst sinds 9/11:IATA

- Advocacy-groep lanceert nationale campagne om gezichtsherkenningstechnologie te verbieden voor gebruik door de overheid

- Logistiek tijdens COVID-19:onderzoeker maakt spiekbriefje voor operationeel model

- Onderzoekers verlichten het pad naar een nieuw tijdperk van micro-elektronica

 Grimmige berichten van de wetenschap over klimaatverandering
Grimmige berichten van de wetenschap over klimaatverandering- Hoe slangen uit vogelnesten te houden
- Kunnen deze kleine vissen de geheimen onthullen van hoe de slaap is geëvolueerd?
- Gebruik van bomen
- Chinese rechtbank verbiedt iPhone-verkoop in patentgeschil:Qualcomm
- Loodvervuiling in poolijs toont economische impact van oorlogen en plagen voor de afgelopen 1 500 jaar
- Nieuwe nanosensoren voor de detectie van TNT
- Google zegt dat een bug in het sociale netwerk privégegevens heeft blootgelegd
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
