Wetenschap
Lopende robots kunnen helpen bij onderzoek op andere planeten

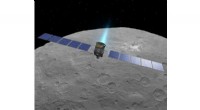
Een robot met "benen" die door een planetair-analoog landschap navigeert in White Sands Dune Field in New Mexico. Krediet:Ryan Ewing
Tegenwoordig gebruikt NASA wielrovers om over het oppervlak van Mars te navigeren en planetaire wetenschap uit te voeren, maar onderzoek waarbij wetenschappers van de Texas A&M University betrokken zijn, zal de haalbaarheid testen van nieuwe oppervlakte-exploratietechnologie:lopende robots.
Ryan Ewing, Robert R. Berg Professor in de afdeling Geologie en Geofysica van Texas A&M, en Marion Nachon, associate research scientist in geologie en geofysica, zijn mede-onderzoekers van het project dat wordt ondersteund door NASA en geleid door Feifei Qian, een WiSE Gabilan Universitair docent aan de University of Southern California Viterbi School of Engineering. Het doel van het onderzoek is het creëren en testen van lopende of "benige" robots die gemakkelijker door ijzige oppervlakken, korstzand en andere moeilijk te navigeren omgevingen kunnen glijden, waardoor het vermogen van wetenschappers om informatie van planetaire lichamen te verzamelen aanzienlijk wordt verbeterd. .
Hoewel de Mars Exploration Rovers en andere robots met succes de ruimte in zijn gestuurd, werken ze meestal op basis van voorgeprogrammeerde agenda's waarbij menselijke wetenschappers en ingenieurs gedetailleerde instructies moeten invoeren over waar ze heen moeten en wat ze moeten doen voordat de robots arriveren bij de planeet. Als gevolg hiervan heeft de robot, wanneer hij onverwachte scenario's tegenkomt of interessante metingen ontdekt, beperkte mogelijkheden om zijn plan aan te passen. Dit kan de manier waarop robots en rovers door nieuwe omgevingen navigeren, belemmeren of er zelfs voor zorgen dat ze wetenschappelijke kansen missen.
Ewing zegt dat een beter begrip van hoe robottechnologie kan worden geïntegreerd met zowel planetaire wetenschap als cognitieve wetenschap, de door robots ondersteunde verkenning van planetaire omgevingen zal verbeteren. Dit project is bedoeld om robots van de volgende generatie met hoge mobiliteit te testen die behendig door planetaire oppervlakken kunnen bewegen en op flexibele wijze wetenschappelijke onderzoeksdoelen kunnen ondersteunen.
"We zullen dit onderzoek uitvoeren op twee belangrijke planetaire analoge locaties die goed gedefinieerde gradiënten in bodemtypes vertonen, van knapperig zand bij White Sands Dune Field, N.M., tot ijzige rotsmengsels bij Mt. Hood, Oregon," legde Ewing uit. "Ons doel is om poten met hoge mobiliteit te integreren met ingebouwde technologieën voor terreindetectie en cognitieve menselijke beslissingsmodellen om de geotechnische eigenschappen van deze bodems te bestuderen."
Het project maakt gebruik van "bio-geïnspireerde" robots met poten, wat betekent dat hun vorm is gemodelleerd naar het unieke vermogen van dieren om goed te bewegen op uitdagende oppervlakken zoals zacht zand. Door gebruik te maken van de nieuwste "direct-drive" actuatortechnologie, kunnen deze robots het terrein (bijv. zandzachtheid en rotsvormen) door hun benen "voelen". Dit vermogen stelt de robots met poten in staat om op dezelfde manier als dieren met de omgeving om te gaan en hun bewegingen indien nodig aan te passen.
Zoals Qian het stelt, zijn deze robots zo gemodelleerd dat ze "niet alleen kunnen nabootsen hoe de dieren eruitzien, maar ook echt begrijpen wat deze dieren succesvol maakt op verschillende terreinen."
De mogelijkheid om het terrein te "voelen" met behulp van benen stelt deze robots ook in staat om gemakkelijk informatie over de omgeving te verzamelen terwijl ze zich verplaatsen en verkenningsstrategieën aan te passen op basis van deze informatie.
"We zullen onderzoeken hoe de wrijving en erodibiliteit van verschillende bodems wordt beïnvloed door oppervlaktekorsten, met rotsen bedekte bodems en ijs", legt Ewing uit. "We zullen de direct-drive legged robots inzetten om de bodemsterkte in kaart te brengen op twee locaties die lijken op landschappen op de maan, Mars en andere werelden. We zullen tegelijkertijd omgevingsparameters meten die de bodemsterkte regelen, waaronder deeltjesgrootte en vorm, bodemvocht, chemische samenstelling en ijsgehalte."
Terwijl wetenschappers ernaar blijven streven om planetaire omgevingen te verkennen, merkt Qian op dat de voordelen van het sturen van robots en rovers op initiële missies om informatie te verzamelen voordat ze mensen sturen, aanzienlijk zijn.
"Zelfs in omgevingen waar het veilig is om astronauten te sturen, kunnen mobiele robots wetenschappelijke instrumenten integreren en helpen bij het nemen van nauwkeurige metingen terwijl ze zich verplaatsen," zei Qian.
De onderzoeksgroep omvat ook wetenschappers van de Universiteit van Pennsylvania, het Georgia Institute of Technology en het Johnson Space Center van NASA.
"Dit is het droomteam en een zeer zeldzame kans om een team met alle componenten in één project samen te brengen", zei Qian. + Verder verkennen
Op insecten geïnspireerde AI voor autonome robots
 Luchthaven Bali gesloten terwijl Agung-vulkaan kolom van ash . gutst
Luchthaven Bali gesloten terwijl Agung-vulkaan kolom van ash . gutst- GPM vangt lijn van sterke stormen die verantwoordelijk zijn voor tornado's in het oosten van de VS
- De toekomst biedt uitdagingen en kansen voor zuivelproducenten
- 5 dingen die Joe Biden kan doen om klimaatverandering te bestrijden - zonder hulp van het Congres
- De beweging en de gevolgen van microplasticvervuiling voorspellen
Hoofdlijnen
- Nieuwe histonmodificaties koppelen metabolisme aan genactiviteit
- Genetici ontdekken twee verschillende manieren om transcriptie te beëindigen
- Bedwantsen proberen in je vuile was te komen
- Bacteriële groei in petrischalen meten
- Nieuw model voor het analyseren van kleurwaarneming bij bladluizen
- Burn-out eist zware financiële tol van diergeneeskunde
- Great Salt Lake op weg naar hyperzoutgehalte, spiegelend Iraans meer, blijkt uit nieuw onderzoek
- Welke vier dingen maken ribosomen anders dan organellen?
- Nieuwe cijfers tonen bevolkingsgroei nabij globes kwetsbare koraalriffen




 Waarom worden sommige legeringen sterker bij kamertemperatuur?
Waarom worden sommige legeringen sterker bij kamertemperatuur?- Facebook-memes tijdens de presidentsverkiezingen van 2016 verschillen van genderstereotypen
- Vrijheidsgraden in een Chi-Square-test
- Wetenschappers zetten onmiddellijke acties en toekomstige onderzoeksprioriteiten uiteen om het VK te helpen het netto-nuldoel te bereiken
- Innovatieve techniek maakt gebruik van sensorische nanodeeltjes om ziekte te detecteren
- Tropische cycloon Oma bedreigt Vanuatu, gezien door Suomi NPP-satelliet
- Wat zijn de nieuwste toepassingen van aardgas?
- Wetenschappers werpen nieuw licht op moleculair gedrag
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
