Wetenschap
Objectieve evaluatie van mechanische expressiviteit in Android en menselijke gezichten
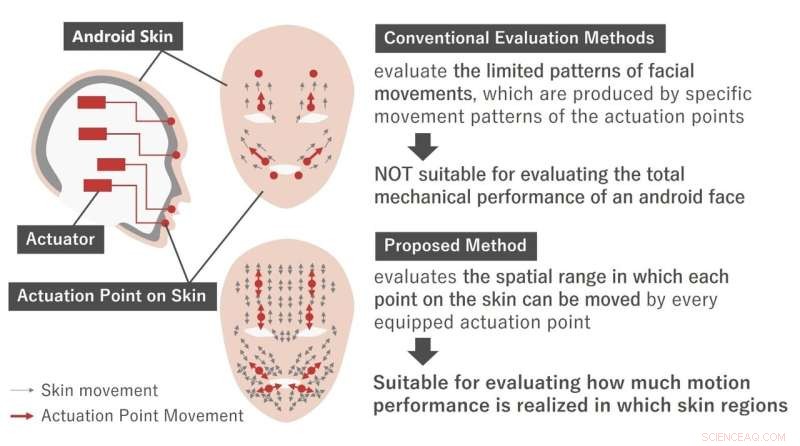
Verschil tussen conventionele en de voorgestelde evaluatiemethoden voor Android-gezichten. Krediet:Hisashi Ishihara
Een wetenschapper van de Graduate School of Engineering aan de Universiteit van Osaka stelde een numerieke schaal voor om de expressiviteit van robotachtige Android-gezichten te kwantificeren. Door te focussen op het deformatiebereik van het gezicht in plaats van op het aantal mechanische actuatoren, kan het nieuwe systeem nauwkeuriger meten hoeveel robots in staat zijn om werkelijke menselijke emoties na te bootsen. Dit werk, gepubliceerd in Advanced Robotics , kan helpen bij het ontwikkelen van meer levensechte robots die snel informatie kunnen overbrengen.
Stel je voor dat je bij je volgende bezoek aan het winkelcentrum naar de informatiebalie gaat om de weg naar een nieuwe winkel te vragen. Maar tot je verbazing bemant een Android het bureau. Hoezeer het ook klinkt als sciencefiction, deze situatie is misschien niet zo ver in de toekomst. Een obstakel hiervoor is echter het ontbreken van een standaardmethodologie voor het meten van de expressiviteit van Android-gezichten. Het zou vooral handig zijn als de index gelijkelijk zou kunnen worden toegepast op zowel mensen als androïden.
Nu werd een nieuwe evaluatiemethode voorgesteld aan de universiteit van Osaka om de mechanische prestaties van Android-robotgezichten nauwkeurig te meten. Hoewel gezichtsuitdrukkingen belangrijk zijn voor het doorgeven van informatie tijdens sociale interacties, kan de mate waarin mechanische actuatoren menselijke emoties kunnen reproduceren sterk variëren.
"Het doel is om te begrijpen hoe expressief een Android-gezicht kan worden vergeleken met mensen", zegt auteur Hisashi Ishihara. Terwijl eerdere evaluatiemethoden zich alleen richtten op specifieke gecoördineerde gezichtsbewegingen, gebruikt de nieuwe methode het ruimtelijke bereik waarover elk huiddeel kan bewegen voor de numerieke indicator van 'expressiviteit'. Dat wil zeggen, in plaats van te rekenen op het aantal gezichtspatronen dat kan worden gecreëerd door de mechanische actuatoren die de bewegingen besturen of de kwaliteit van deze patronen te evalueren, keek de nieuwe index naar het totale ruimtelijke bewegingsbereik dat toegankelijk is voor elk punt op het gezicht .
-
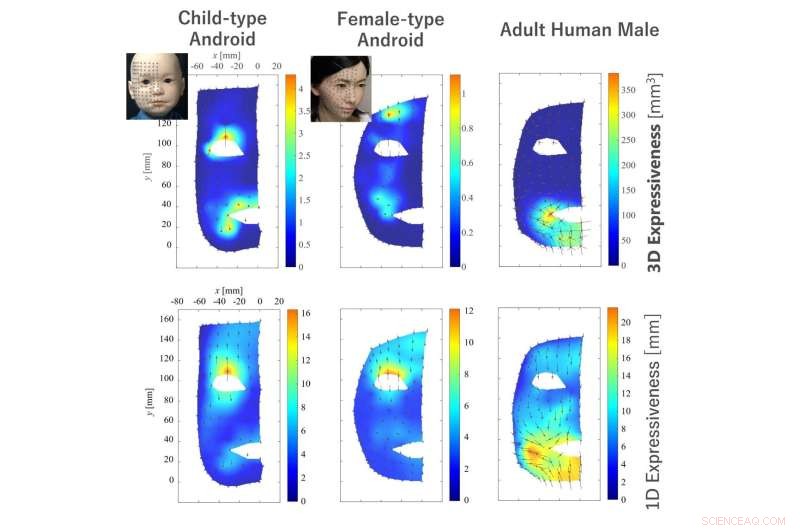
Ruimtelijke verdelingen van de zeggingskracht op gezichten van androïden en een mens. Krediet:Hisashi Ishihara
-
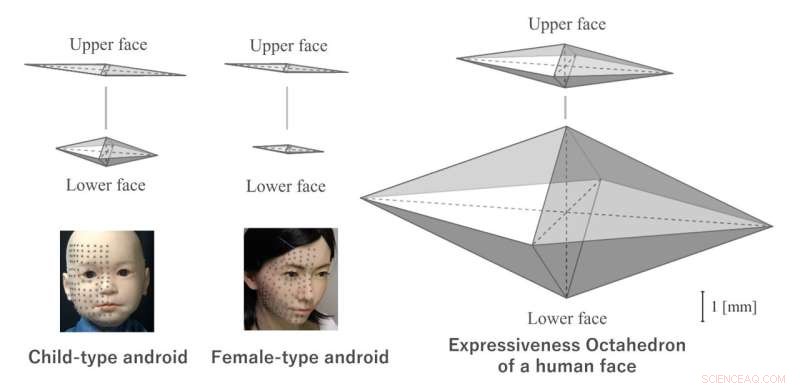
Vergelijking van geschatte octaëders van de expressiviteit. Krediet:Hisashi Ishihara
Voor deze studie werden twee androïden geanalyseerd, een voor een kind en een voor een volwassen vrouw, samen met drie volwassen mannen. Verplaatsingen van meer dan 100 gezichtspunten voor elk onderwerp werden gemeten met behulp van een optisch bewegingsregistratiesysteem. Er werd ontdekt dat de expressiviteit van de androïden aanzienlijk minder was dan die van mensen, vooral in de lagere delen van de gezichten. In feite was het potentiële bewegingsbereik van de androïden slechts ongeveer 20% van dat van mensen, zelfs in de meest milde evaluatie.
"Deze methode zal naar verwachting helpen bij de ontwikkeling van androïden met een expressieve kracht die wedijvert met wat mensen kunnen", zegt Ishihara. Toekomstig onderzoek naar deze evaluatiemethode kan Android-ontwikkelaars helpen om robots te maken met verhoogde expressiviteit. + Verder verkennen
Twijfels uiten:vergelijkende analyse van menselijke en Android-gezichten zou tot verbeteringen kunnen leiden
 Onderzoekers ontwikkelen baanbrekende röntgentechniek om oude artefacten te analyseren
Onderzoekers ontwikkelen baanbrekende röntgentechniek om oude artefacten te analyseren- Plastic transparanter maken en tegelijkertijd elektrische geleidbaarheid toevoegen
- Het op maat maken van het oppervlak van koolstof kan de sleutel zijn tot het in realtime monitoren van het bloed van de patiënt
- Klimaatvriendelijke schuimisolatie van gebouwen kan meer kwaad dan goed doen
- Nieuw model onthult mogelijkheid om antibiotica in bacteriën te pompen
- Zweedse boeren rekenen kosten van historische droogte
- Suomi NPP-satelliet vindt tyfoon Shanshan nabij de kust van Japan
- Verontrustende inzichten in de chemicaliën in kunststoffen
- Ozongat boven Antarctica groter dan normaal, wetenschappers zeggen:
- Afbraak van polystyreen in de oceaan - vervuiling op wereldschaal
Hoofdlijnen
- Hoe beïnvloeden Genotype en Fenotype hoe je eruit ziet?
- Onderzoekers ontdekken dat stress tijdens de zwangerschap de grootte van de baby beïnvloedt
- Welke organellen helpen moleculen diffunderen over een membraan door transporteiwitten?
- Wat gebeurt er met plantaardige en dierlijke cellen wanneer ze worden geplaatst in hypertone, hypotone en isotone omgevingen?
- Onkruidverdelger glyfosaat, controversieel maar nog steeds het meest gebruikt
- Nieuw rapport benadrukt mogelijkheden voor het behoud van lieveheersbeestjes wereldwijd
- Hoe een cellenvorm zijn functie beïnvloedt
- Volledig diagram van het menselijk lichaam
- Wetenschappers roepen op tot actie om invasieve boomsoort aan te pakken
- Risico op streamingmoeheid als Walmart, AT&T, Disney doe mee aan de strijd

- Online kerk:ministeries gebruiken VR, apps om digitale diensten en virtuele dopen te leveren

- Tesla roept 14 terug 000 auto's in China vanwege Takata-airbags

- Een nieuwe methode om valse data-injectie (FDI)-aanvallen te detecteren
- Russische hackers hebben mensen misleid om hun wachtwoorden te geven


 Hoe klein is een small-world netwerk?
Hoe klein is een small-world netwerk?- Aardbeving schudt noordoost China, maar geen zichtbare schade
- De engste dingen in het universum zijn zwarte gaten - en hier zijn drie redenen:
- Online professionele ontwikkeling vergroot het zelfvertrouwen van leraren, kennis
- Methaanbronnen in Parijs in kaart brengen
- Chimpansees in het wild wijzigen waarschuwingen op basis van wat anderen in hun groep al weten, studie vondsten
- Onderwijs met winstoogmerk is de belangrijkste oorzaak van de studentenschuldencrisis in Amerika
- Zaailingen staan voor zware strijd met klimaatverandering
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
