Wetenschap
Aquabots:ultrazachte vloeibare robots voor biomedische en milieutoepassingen
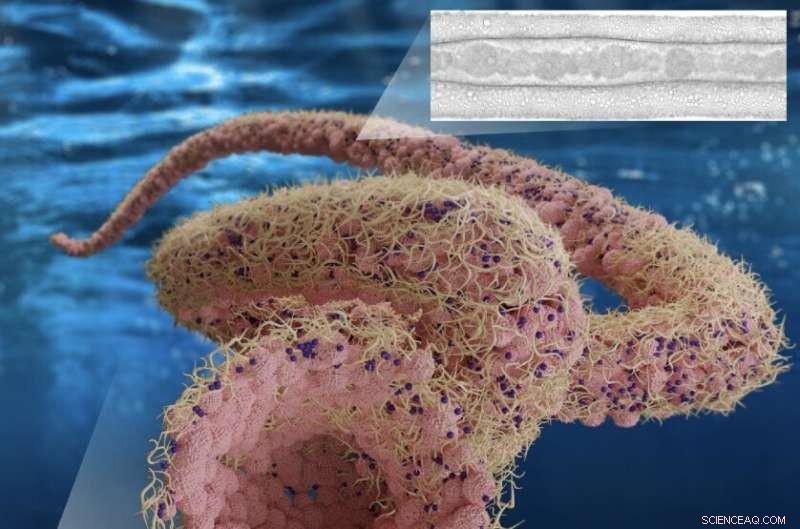
De versterkte weergave van de aquabots. De microfoto in de linkerbenedenhoek is de buigende vorm "σ" van de aquabot. De microfoto in de rechterbovenhoek is de compartimentele structuren van de aquabot. Herdrukt met toestemming van {Zhu, Shipei, et al. "Aquabots." ACS nano (2022).} Copyright {2022} American Chemical Society.
In de afgelopen jaren hebben robotici een grote verscheidenheid aan robotsystemen ontwikkeld met verschillende lichaamsstructuren en mogelijkheden. De meeste van deze robots zijn gemaakt van harde materialen, zoals metalen, of zachte materialen, zoals siliconen en rubberachtige materialen.
Onderzoekers van de Hong Kong University (HKU) en het Lawrence Berkeley National Laboratory hebben onlangs Aquabots gemaakt, een nieuwe klasse van zachte robots die voornamelijk uit vloeistoffen bestaan. Aangezien de meeste biologische systemen voornamelijk bestaan uit water of andere waterige oplossingen, zijn de nieuwe robots, geïntroduceerd in een paper gepubliceerd in ACS Nano , zou zeer waardevolle biomedische en milieutoepassingen kunnen hebben.
"We zijn bezig geweest met de ontwikkeling van adaptieve grensvlakassemblages van materialen op het olie-water- en water-water-interface met behulp van nanodeeltjes en polyelektrolyten", vertelden Ho Cheung (Anderson) Shum, Thomas P. Russell en Shipei Zhu via e-mail aan TechXplore. "Ons idee was om de materialen samen te stellen die de interface en de assemblages in de vormen van de vloeistoffen vergrendelen. De vormen worden gedicteerd met behulp van externe krachten om willekeurige vormen te genereren of om volledig vloeibaar 3D-printen te gebruiken om de assemblages ruimtelijk te kunnen organiseren. "
Shum, Russell, Zhu en hun collega's koppelden volledig vloeibare 3D-printtechnieken aan waterige tweefasige assemblages (ATPS), strategieën voor het samenstellen van 3D-structuren, om kunstmatige constructies te realiseren die biologische systemen nabootsen. ATPS is een belangrijk aandachtsgebied voor de onderzoeksgroep aan de HKU onder leiding van professor Shum.
Het idee voor het recente artikel kwam toen Zhu, destijds een afgestudeerde student aan de HKU, begon na te denken over de mogelijkheid om magnetische nanodeeltjes te integreren in ATPS-assemblagesystemen. Dit zou hen in staat stellen de beweging van de ATPS-constructies te sturen met behulp van externe magnetische velden, wat robotsystemen zou produceren die ultrazacht en flexibel zijn en kunnen worden aangepast voor specifieke functies.
"Onze paper is het hoogtepunt van Zhu's harde werk," zeiden Shum en Russell. "De huidige zachte robots zijn gemaakt voor materialen zoals poly(dimethylsiloxanen) die geweldig zijn voor flexibiliteit maar beperkingen hebben, zoals de mate waarin je ze kunt comprimeren. Het functionaliseren ervan met specifieke chemische functies is belangrijk voor het opvangen en afleveren van materialen, maar is moeilijk. Aquabots overwinnen deze beperkingen."
De robots die door dit team van onderzoekers werden geïntroduceerd, werden geassembleerd in waterige omgevingen. Dit betekent dat ze kunnen werken in waterige omgevingen en ook kunnen worden aangepast om specifieke taken uit te voeren met behulp van in water oplosbare verbindingen.
"Aquabots creëren nieuwe mogelijkheden om bio-geïnspireerde materialen en functies te repliceren, zoals dynamische permeabiliteit en compartimentering," zeiden Russell en Zhu. "De robots zijn volledig waterig, met water aan de binnenkant en water aan de buitenkant. Ze kunnen gemakkelijk worden gefunctionaliseerd om biocompatibel te zijn, dus het is niet moeilijk om bio-toepassingen voor te stellen, d.w.z. in het lichaam, waar dergelijke constructies nuttig zouden kunnen zijn."
De Aquabot-structuren die in de recente paper van het team zijn geïntroduceerd, zijn heel eenvoudig, omdat ze een prototype zijn dat laat zien hoe ze kunnen worden geassembleerd. In de toekomst zou hetzelfde proces echter kunnen worden gebruikt om complexere structuren te creëren die meer geavanceerde taken aankunnen.
"Onze studie toont het vermogen aan om robots te bouwen en robotfuncties uit te voeren op basis van waterige fabricage, en inspireert het ontwerp van vergelijkbare waterige robots voor toepassingen, zoals biomedische micromanipulatie", aldus Shum, Russell en Zhu. "Stel je een eenvoudige buisvormige structuur voor met ingebouwde functionaliteit waarmee je een specifieke structuur in het lichaam kunt maken, een zelfassemblerende robot die de onderdelen door zeer smalle kanalen naar een groter compartiment kan laten gaan waar de zachte, flexibele onderdelen kunnen vervolgens zelf in elkaar zetten om een taak uit te voeren, vervolgens uit elkaar gehaald en verwijderd,"
In de toekomst zouden Aquabots opwindende mogelijkheden kunnen openen voor tal van real-world biomedische en milieutoepassingen. Ze kunnen bijvoorbeeld worden gebruikt om medicijnen af te leveren op specifieke locaties in het menselijk lichaam, om menselijk weefsel biologisch te manipuleren en om de functies van specifieke biologische systemen kunstmatig uit te voeren.
"We proberen nu een hydrogel op te nemen in de assemblage van de robots, zodat we volledig omkeerbare vormveranderingen kunnen bereiken", voegde Shum eraan toe. "In onze volgende werken zou het ook de moeite waard zijn om te kijken naar andere eigenschappen en functies die mogelijk worden gemaakt door het Aquabot-platform, naast de proof-of-concept mechanische manipulatie en chemische reacties die in het artikel worden gedemonstreerd. Het zou interessant zijn om dit te combineren met andere microfluïdische en robotbenaderingen voor nieuwe toepassingen." + Verder verkennen
Een zachte magnetische pixelrobot die kan worden geprogrammeerd om verschillende vormen aan te nemen
© 2022 Science X Network
 Een nieuwe L-fucose metabolische route van strikt anaërobe en pathogene bacteriën
Een nieuwe L-fucose metabolische route van strikt anaërobe en pathogene bacteriën- Dynamische katalysatoren voor schone lucht in de stad
- Volledig solid-state lithium-zwavelbatterijen met een hoge capaciteit en een lange levensduur
- Artritis, ontdekking van auto-immuunziekten kan leiden tot nieuwe behandelingen
- Zelfvoorzienende lus van chemische reacties kan een revolutie teweegbrengen in de productie van geneesmiddelen
- Portugal, een land dat hulpeloos vatbaar is voor bosbranden
- Koolstofopslag biedt hoop voor klimaat, contant geld voor boeren
- Fracking kan tientallen kilometers verderop aardbevingen veroorzaken - nieuw onderzoek
- De waterkwaliteit kan veranderen in gebouwen die zijn gesloten tijdens de COVID-19-pandemie, ingenieurs zeggen:
- Kwikdaling bij zeevogels door dieet, geen emissiecontroles
Hoofdlijnen
- Hoe fruitvliegen hun omgeving opsnuiven
- nieuwe ontdekking, meer bijen markeren Michigans eerst, volledige bijentelling
- Oude genen houden zeeanemonen voor altijd jong
- Is vissen met elektriciteit minder destructief dan de zeebodem opgraven met boomkorren?
- Antibioticaresistentie: definitie, oorzaken en voorbeelden
- Insecten plagen met bitterzoete smaak om gewassen te beschermen
- Vangstvissen kan temperatuurpieken veroorzaken bij haaien
- Wetenschappers:woestijnschildpad bedreigd, 100 over in Arizona
- Grootte is belangrijk - hoe trips hun partners kiezen
- Texas stimuleert Amerikaanse wetenschap met snelste academische supercomputer ter wereld

- Playboy verlaat Facebook om privacyschandaal

- Slimme sensoren kunnen de manier waarop gebouwen worden ontworpen en bezet, veranderen

- Onderzoek toont aan hoe klimaatverandering de waterkrachtproductie in Canada zal beïnvloeden

- Prototype elektrisch vliegtuig neemt eerste vlucht


 Ruwe wateren voor Californië, niet zo openbare stranden
Ruwe wateren voor Californië, niet zo openbare stranden- Veenbessenboeren willen zonnepanelen over hun moerassen bouwen
- Onderzoekers ontwerpen een verbeterde route naar koolstofneutrale kunststoffen
- Heeft orkaan Barry een bijna-record dode zone voorkomen?
- VN-klimaatbesprekingen ontrafelen, gezicht falen
- Extreem isolerende tot geleidende nanodraden beloven nieuwe toepassingen
- Van hout plastic maken
- Hoe te berekenen Aluminums Gewicht
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
