Wetenschap
Bionisch onderwatervoertuig geïnspireerd op vissen met vergrote borstvinnen
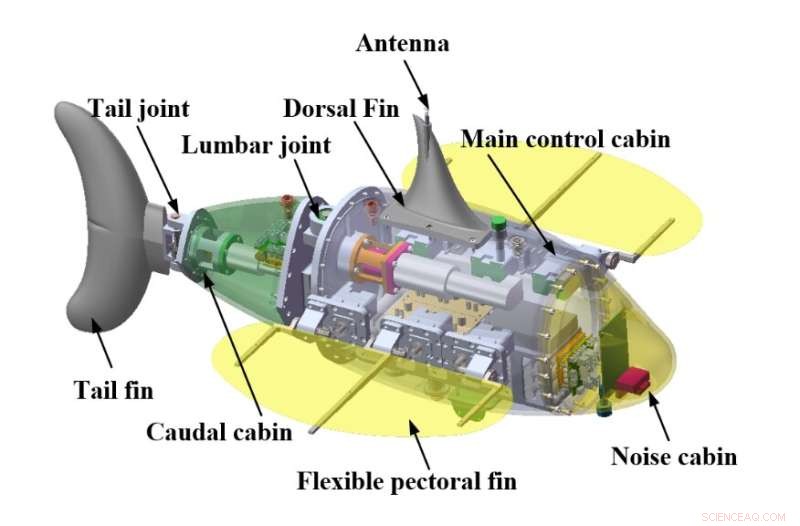
Credit:Rui Wang, Instituut voor Automatisering, Chinese Academie van Wetenschappen
Onderwaterrobots worden veel gebruikt als gereedschap bij verschillende maritieme taken. De RobDact is zo'n bionisch onderwatervoertuig, geïnspireerd op een vis genaamd Dactylopteridae die bekend staat om zijn vergrote borstvinnen. Een onderzoeksteam heeft computationele vloeistofdynamica en een krachtmetingsexperiment gecombineerd om de RobDact te bestuderen, waardoor een nauwkeurig hydrodynamisch model van de RobDact is ontstaan waarmee ze het voertuig beter kunnen besturen.
Het team publiceerde hun bevindingen in Cyborg and Bionic Systems op 31 mei 2022.
Onderwaterrobots worden nu gebruikt voor veel maritieme taken, waaronder in de visserij, onderwaterverkenning en kartering. De meeste traditionele onderwaterrobots worden aangedreven door een propeller, die effectief is om met een stabiele snelheid in open water te varen. Onderwaterrobots moeten echter vaak met lage snelheden in turbulente wateren kunnen bewegen of zweven, terwijl ze een specifieke taak uitvoeren. Het is voor de propeller moeilijk om de robot in deze omstandigheden te verplaatsen. Een andere factor wanneer een onderwaterrobot met lage snelheden in onstabiel stromend water beweegt, is de "trillende" beweging van de propeller. Dit trillen genereert onvoorspelbare vloeistofpulsen die de efficiëntie van de robot verminderen.
De afgelopen jaren hebben onderzoekers gewerkt aan het creëren van onderwaterrobots die levende wezens nabootsen. Deze bionische voertuigen bewegen door het water, vergelijkbaar met de manier waarop vissen of mantaroggen bewegen. In vergelijking met traditionele onderwatervoortstuwingsvoertuigen werken deze bionische onderwatervoertuigen efficiënter en robuuster in het water, terwijl ze milieuvriendelijk zijn.
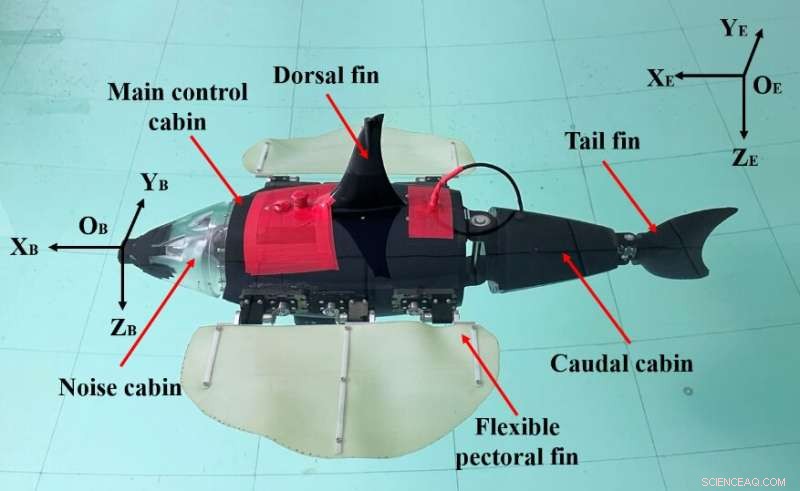
Credit:Rui Wang, Instituut voor Automatisering, Chinese Academie van Wetenschappen
Onderwaterrobots worden beïnvloed door de omringende vloeistof terwijl ze door het water bewegen. Dit fenomeen wordt het hydrodynamisch effect genoemd. Tijdens het bewegen in het water heeft de robot te maken met onbekende waterstroming en kracht, wat kan leiden tot onnodige veranderingen in de positie van de robot.
Om de robot beter te kunnen besturen, hebben onderzoekers een nauwkeuriger hydrodynamisch model nodig. Het maken van dit model is meestal erg complex en moeilijk. Bovendien is de echte onderwateromgeving veranderlijk en moeilijk te voorspellen, waardoor de modelparameters kunnen verschuiven bij een verandering in de omgeving. Onderzoekers hebben computationele vloeistofdynamica gebruikt om hydrodynamische modellen voor onderwaterrobots te maken.
De modellen die zijn gemaakt met alleen computationele vloeistofdynamica zijn echter niet zo nauwkeurig en praktisch als ze zouden moeten zijn. Om deze uitdaging te overwinnen, probeerde het onderzoeksteam een andere aanpak. "Om het hydrodynamische model nauwkeuriger en praktischer te maken, hebben we de computationele vloeistofdynamica en een krachtmetingsexperiment gecombineerd", zegt Rui Wang, een onderzoeker aan het Institute of Automation, Chinese Academy of Sciences.
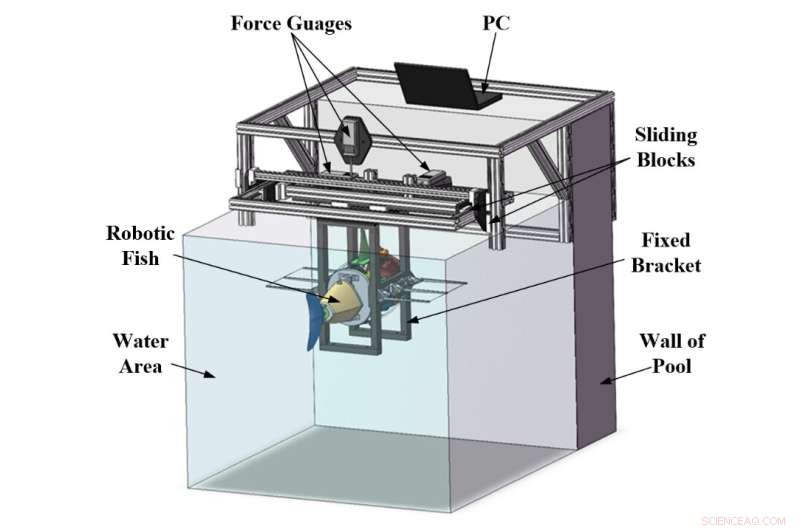
Credit:Rui Wang, Instituut voor Automatisering, Chinese Academie van Wetenschappen
Met behulp van computationele vloeistofdynamica identificeerden de onderzoekers de parameters in het hydrodynamische model. Vervolgens ontwikkelden ze een krachtmeetplatform om de kracht te verkrijgen die door het RobDact-voertuig wordt gegenereerd. Met dit proces konden ze zowel de storende kracht als de kracht die door de RobDact wordt gegenereerd in elke complexe omgeving verkrijgen. "Dit kan ons helpen de bewegingstoestand van het onderwatervoertuig beter te begrijpen en het onderwatervoertuig nauwkeuriger te besturen", zegt Qiyuan Cao, een onderzoeker aan het Institute of Automation, Chinese Academy of Sciences.
Met hun experiment kon het team de hydrodynamische kracht van de RobDact bij verschillende snelheden bepalen. Met het door hen ontwikkelde krachtmeetplatform konden ze de kracht van RobDact in de X-, Y- en Z-richting meten. Ze hebben een mapping-relatie vastgesteld tussen de RobDact-fluctuatieparameters en de stuwkracht van het voertuig door middel van hun krachtmetingsexperimenten. Door het dynamische model van het stijve lichaam van RobDact samen te voegen met het model voor het in kaart brengen van de stuwkracht, konden de onderzoekers een nauwkeurig en praktisch hydrodynamisch model van de RobDact's in verschillende bewegingen ontwikkelen.
Met het oog op de toekomst willen de onderzoekers de intelligente besturing van bionische onderwatervoertuigen bestuderen met behulp van het hydrodynamische model in combinatie met kunstmatige-intelligentiemethoden, zoals versterkingsleren. "Het uiteindelijke doel is om de praktische toepassing van bionische onderwatervoertuigen te promoten bij het monitoren van wateromgevingen en het zoeken en redden onder water", aldus Wang. + Verder verkennen
Een op bever geïnspireerde methode om de bewegingen van een eenbenige zwemmende robot te begeleiden
 Vergulde panty's inspireren een techniek voor comfortabele, lichtgevende kleding
Vergulde panty's inspireren een techniek voor comfortabele, lichtgevende kleding- Chemisch-logische systemen onderzoeken die kunnen reageren op omgevingscondities
- Drie overeenkomsten tussen een verbinding en een Element
- Vlakke en gebogen pyrrool-gefuseerde azacoronenen
- Nieuwe elektrokatalysator ontwikkeld voor opwaardering van biomassa en waterstofopwekking
- Een verrassend antwoord op een brandende vraag:gecontroleerde brandwonden vertragen een bosbrand vaak niet
- Nieuw inzicht in aardkorst, mantel en buitenste kern interacties
- Goedkoop, nauwkeurige en snelle karakterisering van met metaal verontreinigde locaties
- Stervende riffen grotere bedreiging voor kusten dan stijgende zeeën
- Brandweerlieden in Californië jagen op nieuwe branden die door bliksem zijn aangestoken
Hoofdlijnen
- Drone-foto's bieden snellere, goedkopere gegevens over de belangrijkste Antarctische soorten
- Een incubator laten groeien Bacteriën
- Haaienvinnenverboden helpen haaien misschien niet, wetenschappers zeggen:
- Anafase: wat gebeurt er in dit stadium van mitose en meiose?
- Malariaparasiet verpakt genetisch materiaal voor reis van muggen naar mensen
- Orka-pod in het zuiden van het land daalt tot laagste aantal in 46 jaar
- Wat gebeurt er als mitose verkeerd gaat?
- Hoe de percentages van adenine in een DNA-streng te berekenen
- Radiometrische datering: definitie, hoe werkt het, gebruik & voorbeelden
- Silicon Valley gespeeld door een andere reeks regels. Facebooks crisis zou daar een einde aan kunnen maken

- Wanneer verkeerde informatie en idiote samenzweringen zich zo snel verspreiden als het virus

- Geneesmiddelenmaker Bristol-Myers Squibb koopt Celgene in een deal van $ 74 miljard

- Algoritme voor machinaal leren voorspelt wie er in Game of Thrones blijft staan

- Geen taboes in alliantie Nissan-Mitsubishi:CEO van Renault


 Wanneer inertiële referentiekaders botsen
Wanneer inertiële referentiekaders botsen- EU-parlement steunt verbod limieten voor kunststoffen voor eenmalig gebruik
- Coca en conflict:de factoren die de ontbossing in Colombia aanwakkeren
- NASA kijkt naar hardnekkige overblijfselen van ex-tropische cycloon Iris
- Economische kosten van klimaatverandering kunnen zes keer hoger zijn dan eerder werd gedacht
- Ultragevoelige sensoren gemaakt van met boor gedoteerd grafeen
- Actief zeven kan dialyse- en waterzuiveringsfilters verbeteren
- Angst voor ontrouw drijft vooroordelen tegen biculturele immigranten
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
