Wetenschap
Predictive touch response-mechanisme is een stap in de richting van een tactiel internet
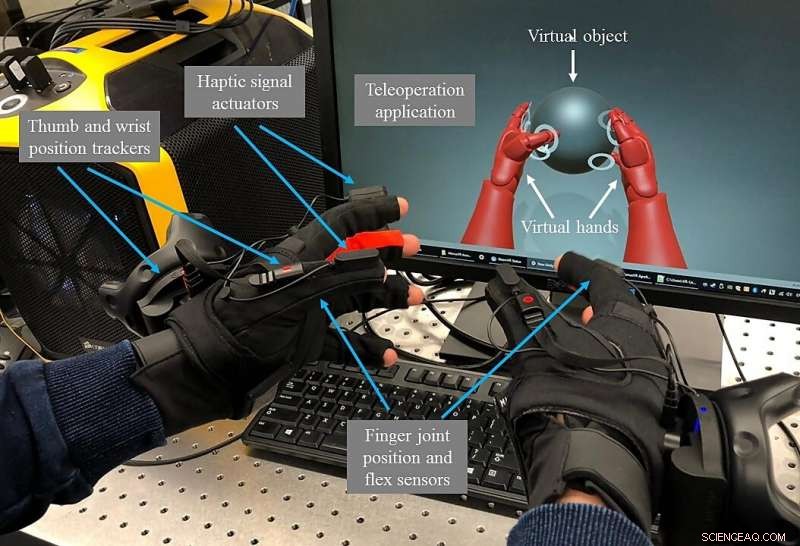
Experimentele opstelling die mens-tot-machine toepassingen demonstreert. Krediet:S. Mondal, et al., De Universiteit van Melbourne
Een tactiel internet is mogelijk de volgende fase van het internet der dingen, waarin mensen externe of virtuele objecten kunnen aanraken en ermee kunnen werken terwijl ze realistische haptische feedback ervaren.
Een team van onderzoekers onder leiding van Elaine Wong van de Universiteit van Melbourne, Australië, ontwikkelde een methode voor het verbeteren van haptische feedback-ervaringen in mens-naar-machine-toepassingen die typisch zijn voor het tactiele internet. De onderzoekers denken dat hun methode kan worden gebruikt voor het voorspellen van goede feedback in toepassingen variërend van elektronische gezondheidszorg tot virtual reality-gaming.
Wong en haar collega's zullen hun voorgestelde module presenteren, die een kunstmatig neuraal netwerk gebruikt om het aangeraakte materiaal te voorspellen, op de Optical Fiber Communication Conference and Exhibition (OFC), wordt gehouden van 8-12 maart 2020 in het San Diego Convention Center, Californië, VS.
Afhankelijk van de dynamiek van de interactie, voor een optimale mens-naar-machine-toepassing kan een netwerkresponstijd van slechts één milliseconde nodig zijn.
"Deze reactietijden leggen een limiet op hoe ver mensen en machines uit elkaar kunnen worden geplaatst, "zei Wong. "Vandaar, oplossingen om deze afstand te ontkoppelen van de responstijd van het netwerk zijn van cruciaal belang voor het realiseren van het tactiele internet."
Als een stap in de richting van dit doel, het team heeft een leeralgoritme voor versterking getraind om de juiste haptische feedback in een mens-naar-machine-systeem te raden voordat de juiste feedback bekend is. De module, de Event-based Haptic SAMple Forecast (EHASAF) genoemd, versnelt het proces door een aanrakingsrespons te bieden op basis van een probabilistische voorspelling van het materiaal waarmee de gebruiker interactie heeft.
"Om mens-tot-machine-toepassingen over langeafstandsnetwerken te vergemakkelijken, we vertrouwen op kunstmatige intelligentie om de effecten van lange propagatielatentie te overwinnen, " zei Sourav Mondal, een auteur op papier.
Zodra het werkelijke materiaal is geïdentificeerd, de unit past zijn kansverdeling aan en actualiseert deze om de juiste feedback te helpen kiezen.
De groep testte de EHASAF-module met een paar virtual reality-handschoenen die door een mens worden gebruikt om een virtuele bal aan te raken. De handschoenen bevatten sensoren op de vingers en polsen om aanrakingen te detecteren en bewegingen te volgen, krachten en de oriëntatie van de hand.
Afhankelijk van de materiaalbal die de gebruiker kiest om aan te raken, zijn er vier virtuele opties beschikbaar, de feedback van de handschoen moet variëren. Bijvoorbeeld, een metalen bal zal steviger zijn dan een schuimbal. Wanneer een neuraal netwerk vaststelt dat een van de vingers de bal heeft aangeraakt, de EHASAF-module begint door feedbackopties te bladeren om te genereren totdat het daadwerkelijke materiaal van de gekozen bal is opgelost.
Momenteel, met vier materialen, de voorspellingsnauwkeurigheid van de module is ongeveer 97%.
"We denken dat het mogelijk is om de voorspellingsnauwkeurigheid te verbeteren met een groter aantal materialen, "zei Mondal. "Echter, er zijn meer geavanceerde, op kunstmatige intelligentie gebaseerde modellen nodig om dat te bereiken."
"Er kunnen steeds meer geavanceerde modellen met verbeterde prestaties worden ontwikkeld op basis van het fundamentele idee van onze voorgestelde EHSAF-module, ' zei Mondal.
Deze resultaten en aanvullend onderzoek zullen ter plaatse worden gepresenteerd op OFC 2020.
 Glucagon-receptorstructuur biedt nieuwe mogelijkheden voor het ontdekken van geneesmiddelen voor type 2 diabetes
Glucagon-receptorstructuur biedt nieuwe mogelijkheden voor het ontdekken van geneesmiddelen voor type 2 diabetes- Koperionen kunnen een sleutelrol spelen wanneer het vouwen van peptiden fout gaat
- "How Does Rust Spread?
- Video:Hortensia's, de vreemde van kleur veranderende bloemen
- Volledig inkjet-geprinte op vanadiumdioxide gebaseerde radiofrequentieschakelaars voor flexibele herconfigureerbare componenten
- wetenschappelijke waarschuwingen, Amerikaanse retraite voegt urgentie toe aan VN-klimaatbesprekingen
- Beoordeling door deskundigen verwerpt plan om zeewater de Murray River in New South Wales in te laten stromen
- Onderzoekers berekenen bodembevriezingsdiepte uit satellietgegevens
- Ecosystem of Wetlands
- Programma's voor het verhuizen van overstromingen zijn meer storend voor degenen die niet in blanke of welvarende buurten wonen
Hoofdlijnen
- Wereldwijd belang van honingbijen voor natuurlijke habitats vastgelegd in nieuw rapport
- Luie valsspeler leeft onder de grond,
- Geboren onder een ongunstige maan, babyvissen vertragen nederzetting op koraalriffen
- Hoe maak je een 3D-plant eukaryotisch celmodel
- Sluwe kraaien weten wat er nodig is om een goed stuk gereedschap te maken
- Zelfs koude harde contanten zijn niet genoeg stimulans om naar tegengestelde meningen te luisteren
- Probeer deze 5 dagelijkse gewoonten om je leven dit jaar te verbeteren
- Wat zijn de niveaus van organisatie in de biologie?
- Wat gebeurt er nadat u een wortel in zout water hebt gestopt?
- Wedden met een smartphone? De casino's weten wie je bent, en waar u zich bevindt

- Oude Facebook-exec Adam Mosseri nieuw hoofd van Instagram

- Flatpack-woningen en retrofits met winstdeling maken duurzame woningen betaalbaar

- Uber-rivaal Bolt herlanceert in Londen na snelle exit uit 2017

- Een NJIT-team voor visietherapie wint de meest innovatieve in de wereldwijde VR-competitie


 Een eierdruppelexperiment ontwerpen met behulp van rietjes
Een eierdruppelexperiment ontwerpen met behulp van rietjes- Onderzoekers ontdekken nieuwe arseenverbindingen in rijstvelden
- De digitale revolutie zou een groene transformatie van de wereldeconomie kunnen ontsluiten
- Hoe een 3D-model van het ademhalingssysteem te maken
- EPA-regel beperkt HFK's scherp, gassen gebruikt als koelmiddel
- Karakterisering van de structuur van een lid van de L-Aminozuur Transporter (LAT) familie
- Bevat regenwater stikstof?
- Team ontwikkelt nieuwe manieren om medicijnen te maken en af te leveren voor een breed scala aan immuun-medicinale neuropathieën
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Portuguese | Swedish | German | Dutch | Danish | Spanish | Norway |

-
Wetenschap © https://nl.scienceaq.com
