Wetenschap
Op weg naar intelligente microrobots
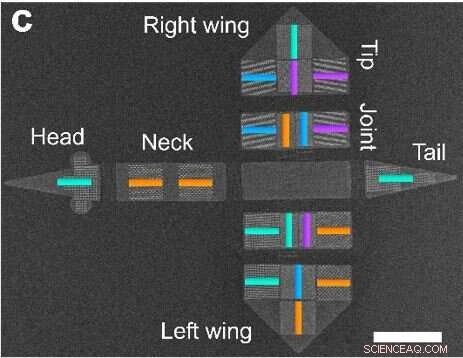
Het beeld van de scanning-elektronenmicroscoop toont de vogelachtige constructie met opstellingen van magneten op nanoschaal. De magneten kunnen parallel aan de kleurenbalken in verschillende oriëntaties worden gemagnetiseerd. Door hun magnetisatie te programmeren, de onderzoekers kunnen vogels verschillende bewegingen laten uitvoeren in een magnetisch veld. Krediet:Paul Scherrer Instituut/Zwitsers Federaal Instituut voor Technologie, Zürich
Onderzoekers van het Paul Scherrer Instituut PSI en ETH Zürich hebben een micromachine ontwikkeld die verschillende acties kan uitvoeren. Eerst worden nanomagneten in de componenten van de microrobots magnetisch geprogrammeerd en daarna worden de verschillende bewegingen aangestuurd door magnetische velden. dergelijke machines, die slechts enkele tientallen micrometers groot zijn, kan gebruikt worden, bijvoorbeeld, in het menselijk lichaam om kleine operaties uit te voeren. De onderzoekers hebben hun resultaten nu gepubliceerd in het wetenschappelijke tijdschrift Natuur .
De robot, die slechts enkele micrometers groot is, doet denken aan een papieren vogel gemaakt met origami - de Japanse kunst van het vouwen van papier. Maar, in tegenstelling tot een papieren structuur, de robot beweegt als bij toverslag zonder een zichtbare kracht. Hij klappert met zijn vleugels of buigt zijn nek en trekt zijn kop terug. Deze acties worden allemaal mogelijk gemaakt door magnetisme.
Onderzoekers van het Paul Scherrer Instituut PSI en ETH Zürich hebben de micromachine samengesteld uit materialen die kleine nanomagneten bevatten. Deze nanomagneten kunnen worden geprogrammeerd om een bepaalde magnetische oriëntatie aan te nemen. Wanneer de geprogrammeerde nanomagneten vervolgens worden blootgesteld aan een magnetisch veld, bepaalde krachten werken op hen in. Als deze magneten zich in flexibele onderdelen bevinden, de krachten die erop inwerken, zorgen ervoor dat de componenten bewegen.
De nanomagneten programmeren
De nanomagneten kunnen steeds opnieuw worden geprogrammeerd. Deze herprogrammering resulteert in verschillende krachten, en er ontstaan nieuwe bewegingen.
Voor de bouw van de microrobot, de onderzoekers fabriceerden arrays van kobaltmagneten op dunne platen siliciumnitride. De uit dit materiaal opgebouwde vogel kon dan verschillende bewegingen maken, zoals klappen, zweven, draaien of zijdelings uitglijden.
"De bewegingen van de microrobot vinden plaats binnen milliseconden, " zegt Laura Heyderman, hoofd van het Laboratory for Multiscale Materials Experiments bij PSI en professor voor Mesoscopic Systems bij de Department of Materials, ETH Zürich. “Maar het programmeren van de nanomagneten duurt maar een paar nanoseconden. Hierdoor is het mogelijk om de verschillende bewegingen achter elkaar te programmeren. Dit betekent dat het kleine microvogeltje eerst met zijn vleugels kan klappen, dan opzij glijden en daarna weer flapperen. "Indien nodig, de vogel zou er ook tussen kunnen zweven, ’ zegt Heyderman.
Laura Heyderman (links) en Tian-Yun Huang (midden) kijken naar een model van de origamivogel, terwijl Jizhai Cui de echte microrobot onder een microscoop observeert. Wat hij kan zien, wordt getoond in de video die de onderzoekers hebben gemaakt. Krediet:Paul Scherrer Instituut/Mahir Dzambegovic
Intelligente microrobots
Dit nieuwe concept is een belangrijke stap in de richting van micro- en nanorobots die niet alleen informatie opslaan om een bepaalde actie te geven, maar kan ook opnieuw worden geprogrammeerd om verschillende taken uit te voeren. "Het is denkbaar dat, in de toekomst, een autonome micromachine zal door menselijke bloedvaten navigeren en biomedische taken uitvoeren zoals het doden van kankercellen, " legt Bradley Nelson uit, hoofd van de afdeling Werktuigbouwkunde en Procestechniek aan de ETH Zürich. "Ook andere toepassingsgebieden zijn denkbaar, bijvoorbeeld flexibele micro-elektronica of microlenzen die hun optische eigenschappen veranderen, " zegt Tianyun Huang, een onderzoeker aan het Institute of Robotics and Intelligent Systems aan de ETH Zürich.
In aanvulling, toepassingen zijn mogelijk waarbij de eigenschappen van oppervlakken veranderen. "Bijvoorbeeld, ze kunnen worden gebruikt om oppervlakken te creëren die door water kunnen worden bevochtigd of water kunnen afstoten, " zegt Jizhai Cui, een ingenieur en onderzoeker in het Mesoscopic Systems Lab.
 Hoe een fractie te berekenen Covalent
Hoe een fractie te berekenen Covalent- Doorbraak in snelle, massale screening op het ebolavirus
- Nieuwe techniek om de bron van voedselvergiftiging te lokaliseren
- Natte aluminiumhydroxide- en oxyhydroxidedeeltjes geven waterstof af bij bestraling
- Nieuwe methode maakt geautomatiseerd snel onderzoek van enzymatische processen mogelijk
- Een toevallige ontmoeting met Amazon, dan is een stam bijna uitgestorven
- Een globale kijk op organische koolstof aan de oppervlakte
- Nieuw Mekong River-initiatief zal de waarden van biodiversiteit benadrukken, ecosystemen
- Project zoekt duurzame blauwdruk voor waterkrachtdammen
- NASA vindt dodelijke Lekimas-resten boven China
Hoofdlijnen
- Waarom zijn sommige dieren moeilijker te klonen dan andere?
- Wat is Feedback-inhibitie en waarom is het belangrijk bij het reguleren van de enzymactiviteit?
- Lysosoom: definitie, structuur en functie
- Hoe kunnen kinderen van dezelfde ouders er zo verschillend uitzien?
- Waar bevinden lipiden zich in het lichaam?
- Schapen kunnen menselijke gezichten van foto's herkennen
- Het verschil tussen genomisch DNA en plasmide DNA
- Waarom het een goed idee is om met je dronken oom over politiek te praten
- Invasieve planten hebben een ongekend vermogen om nieuwe continenten en klimaten te verkennen
- Rechtszaak beschuldigt Tesla van poging om shortsellers te verbranden

- Als je denkt dat de millenniumbug een hoax was, hier komt een geschiedenisles

- Valve Index wordt high-end in de wereld van VR-headsets

- Kunstmatige intelligentie zal de werkplek zowel verstoren als ten goede komen, geleerde zegt:

- Europese piloten diep verontrust door mogelijke terugkeer 737 MAX


 Samsung zegt dat het gegevens heeft gelekt over een handvol Britse klanten
Samsung zegt dat het gegevens heeft gelekt over een handvol Britse klanten- Ontbossing van het Amazonebekken kan verre regenwouden verstoren door een klimaatverbinding op afstand
- 'S Werelds oudste intacte scheepswrak gevonden in de Zwarte Zee
- Biomedische ingenieurs ontdekken dat actieve deeltjes tegen de stroom in zwemmen
- Filippijnen plannen gedwongen evacuaties rond uitbarstende vulkaan
- Grote landvormen in de regio Midwesten
- De vechtende vrouwen van Afrika verzamelen plastic om scholen te bouwen
- CERN benoemt Gianotti, eerste vrouwelijke chef, naar tweede termijn
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
