Wetenschap
Robots die recycling kunnen sorteren

RoCycle kan detecteren of een object papier is, metaal, of kunststof. CSAIL-onderzoekers zeggen dat een dergelijk systeem mogelijk kan helpen om het gemak van single-stream recycling mogelijk te maken met lagere besmettingspercentages die voldoen aan de nieuwe recyclingnormen van China. Krediet:Jason Dorfman
Elk jaar doorzoeken afvalbedrijven naar schatting 68 miljoen ton aan recycling, dat is het gewichtsequivalent van meer dan 30 miljoen auto's.
Een belangrijke stap in het proces vindt plaats op snel bewegende transportbanden, waar werknemers items moeten sorteren in categorieën zoals papier, kunststof en glas. Zulke banen zijn saai, vies, en vaak onveilig, vooral in faciliteiten waar werknemers ook normaal afval uit de mix moeten verwijderen.
Met dat in gedachten, een team onder leiding van onderzoekers van MIT's Computer Science and Artificial Intelligence Laboratory (CSAIL) heeft een robotsysteem ontwikkeld dat kan detecteren of een object van papier is, metaal, of kunststof.
Het "RoCycle"-systeem van het team omvat een zachte teflonhand die tactiele sensoren op zijn vingertoppen gebruikt om de grootte en stijfheid van een object te detecteren. Compatibel met elke robotarm, RoCycle bleek 85 procent nauwkeurig te zijn in het detecteren van materialen in stilstand, en 63 procent nauwkeurig op een daadwerkelijke gesimuleerde transportband. (De meest voorkomende fout was het identificeren van met papier bedekte metalen blikken als papier, waarvan het team zegt dat het zou worden verbeterd door meer sensoren langs het contactoppervlak toe te voegen.)
"De sensorische huid van onze robot geeft haptische feedback waardoor hij onderscheid kan maken tussen een breed scala aan objecten, van stijf tot zacht, " zegt MIT-professor Daniela Rus, senior auteur van een gerelateerd artikel dat in april zal worden gepresenteerd op de IEEE International Conference on Soft Robotics (RoboSoft) in Seoul, Zuid-Korea. "Computervisie alleen zal niet in staat zijn om het probleem op te lossen om machines een menselijke perceptie te geven, dus het kunnen gebruiken van tactiele invoer is van vitaal belang."
Een samenwerking met Yale University, RoCycle demonstreert direct de grenzen van op zicht gebaseerde sortering:het kan op betrouwbare wijze onderscheid maken tussen twee visueel vergelijkbare Starbucks-bekers, één van papier en één van plastic, dat zou problemen met zichtsystemen opleveren.
Recycling stimuleren
Rus zegt dat het project deel uitmaakt van haar grotere doel om de back-endkosten van recycling te verlagen, om meer steden en landen te stimuleren hun eigen programma's te creëren. Tegenwoordig zijn recyclingcentra niet bepaald geautomatiseerd; hun belangrijkste soorten machines omvatten optische sorteerders die licht van verschillende golflengten gebruiken om onderscheid te maken tussen kunststoffen, magnetische sorteerders die ijzer- en staalproducten scheiden, en aluminiumsorteerders die wervelstromen gebruiken om niet-magnetische metalen te verwijderen.
Dit is een probleem om een heel belangrijke reden:vorige maand verhoogde China zijn normen voor de reinheid van gerecycleerde goederen die het uit de Verenigde Staten accepteert, wat betekent dat een deel van de single-stream recycling van het land nu naar stortplaatsen wordt gestuurd.
"Als een systeem als RoCycle op grote schaal zou kunnen worden ingezet, we zouden mogelijk het gemak van single-stream recycling kunnen hebben met de lagere verontreinigingspercentages van multi-stream recycling, " zegt promovendus Lillian Chin, hoofdauteur van het nieuwe artikel.
Het is verrassend moeilijk om machines te ontwikkelen die onderscheid kunnen maken tussen papier, plastic, en metaal, waaruit blijkt hoe indrukwekkend een prestatie het is voor mensen. Als we een voorwerp oppakken, we kunnen onmiddellijk veel van zijn kwaliteiten herkennen, zelfs met onze ogen dicht, zoals of het nu groot en stijf is of klein en zacht. Door het object te voelen en te begrijpen hoe dat zich verhoudt tot de zachtheid van onze eigen vingertoppen, we kunnen leren hoe we een breed scala aan objecten moeten hanteren zonder ze te laten vallen of te breken.
Dit soort intuïtie is moeilijk te programmeren in robots. Traditionele harde ("rigide") robothanden moeten de exacte locatie en grootte van een object weten om een nauwkeurig bewegingspad te kunnen berekenen. Zachte handen gemaakt van materialen zoals rubber zijn veel flexibeler, maar hebben een ander probleem:omdat ze worden aangedreven door fluïde krachten, ze hebben een ballonachtige structuur die vrij gemakkelijk kan worden doorboord.
Hoe RoCycle werkt
Het team van Rus gebruikte een door een motor aangedreven hand gemaakt van een relatief nieuw materiaal dat 'auxetica' wordt genoemd. De meeste materialen worden smaller als er aan wordt getrokken, als een elastiekje als je het uitrekt; auxetica, In de tussentijd, daadwerkelijk breder worden. Het MIT-team nam dit concept en gaf er een draai aan, vrij letterlijk:ze creëerden auxetica die, wanneer gesneden, draai naar links of naar rechts. Het combineren van een "linkshandige" en "rechtshandige" auxetic voor elk van de twee grote vingers van de hand zorgt ervoor dat ze in elkaar grijpen en elkaars rotatie tegenwerken, waardoor meer dynamische bewegingen mogelijk zijn. (Het team noemt dit "handed-shearing auxetics", of HSA.)
"In tegenstelling tot zachte robots, wiens vloeistofgedreven aanpak luchtpompen en compressoren vereist, HSA combineert draaien met extensie, wat betekent dat je gewone motoren kunt gebruiken, ' zegt Chin.
De grijper van het team gebruikt eerst zijn "reksensor" om de grootte van een object te schatten, en gebruikt vervolgens zijn twee druksensoren om de kracht te meten die nodig is om een object vast te pakken. Deze statistieken, samen met kalibratiegegevens over de grootte en stijfheid van objecten van verschillende materiaalsoorten, geven de grijper een idee van welk materiaal het object is gemaakt. (Aangezien de tactiele sensoren ook geleidend zijn, ze kunnen metaal detecteren door hoeveel het het elektrische signaal verandert.)
"Met andere woorden, we schatten de grootte en meten het drukverschil tussen de huidige gesloten hand en hoe een normale open hand eruit zou moeten zien, " zegt Chin. "We gebruiken dit drukverschil en deze grootte om het specifieke object te classificeren op basis van informatie over verschillende objecten die we al hebben gemeten."
RoCycle bouwt voort op een set sensoren die de straal van een object met een nauwkeurigheid van 30 procent detecteren, en vertel het verschil tussen "harde" en "zachte" objecten met een nauwkeurigheid van 78 procent. De hand van het team is ook bijna volledig prikbestendig:hij kon meer dan 20 keer worden geschraapt door een scherp deksel en door een naald worden doorboord, met minimale structurele schade.
Als volgende stap, de onderzoekers zijn van plan het systeem zo uit te bouwen dat het tactiele gegevens kan combineren met daadwerkelijke videogegevens van de camera's van een robot. Dit zou het team in staat stellen de nauwkeurigheid verder te verbeteren en mogelijk een nog genuanceerder onderscheid tussen verschillende soorten materialen mogelijk te maken.
Dit verhaal is opnieuw gepubliceerd met dank aan MIT News (web.mit.edu/newsoffice/), een populaire site met nieuws over MIT-onderzoek, innovatie en onderwijs.
 Duurzaam constructiemateriaal voor kunststofvervanger
Duurzaam constructiemateriaal voor kunststofvervanger- Onderzoekers stellen een strategie voor voor katalytische regiodivergente hydrosilylering van isopreen
- vingerafdrukken, opnieuw bekeken
- Onderzoekers passen een snelle en effectieve strategie voor verrijking van N-fosfopeptiden aan
- Nieuwe stabiele vorm van plutonium ontdekt
Hoofdlijnen
- Horzels lokken:wetenschappers ontsluiten seksferomoon van berucht honingbij-roofdier
- Wat breekt een dubbele DNA-helix uiteen?
- Vier hoofdgroepen organische verbindingen waaruit levende organismen bestaan
- Drie voorbeelden van protisten met wetenschappelijke namen
- Biologische leeftijd verklaart variatie in reacties op stress
- DNA is gecondenseerd in welke fasen?
- Parasieten van huisdieren die dieren in het wild wereldwijd aantasten
- Een incubator laten groeien Bacteriën
- Een keep-fit gadget voor uw hond deze kerst - wie heeft er echt baat bij?
- Apple biedt een reeks iPhones, van $ 450 tot $ 1, 100

- Chinese smartphonegigant Xiaomi debuteert in Londen

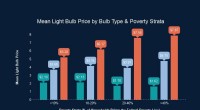
- Energie onrecht? Kosten, beschikbaarheid van energiezuinige gloeilampen varieert met de armoede
- Facebook rolt videodienst wereldwijd uit

- Door het spel met afbeeldingen te raden met de computer zal de AI-inspanning wat gezond verstand laten groeien

 Progenitor voor Tychos supernova was niet heet en lichtgevend
Progenitor voor Tychos supernova was niet heet en lichtgevend- Hoe racisme bijdraagt aan een zeer ivoren toren
- Psychologen onderzoeken de beslissingen van de politie om te schieten
- Moderne celtheorie
- VS onderzoeken mogelijke gendervooroordelen bij Uber
- Permafrost-koolstoffeedback bedreigt wereldwijde klimaatdoelen
- Apple krijgt geen vrijstelling van tarieven voor bepaalde importen uit China:Trump
- Nieuwe inkjetprintmethode kan het ontdekken van medicijnen en geprinte gepersonaliseerde medicijnafgifte versnellen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
