Wetenschap
Een nieuwe herconfiguratiestrategie voor modulaire robots geïnspireerd op het vouwen van origami
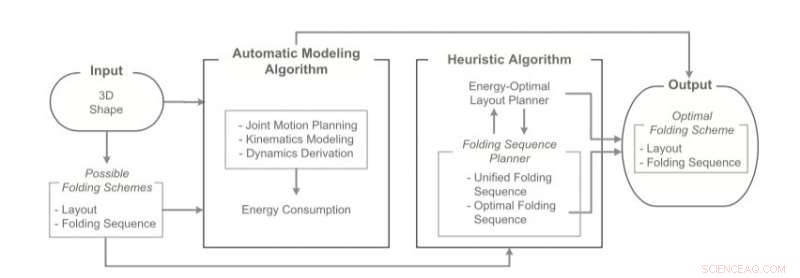
Overzicht van energie-optimale herconfiguratieplanning voor modulaire robots met behulp van twee benaderingen, een automatisch modelleringsalgoritme en een heuristisch algoritme. Krediet:Yao et al.
Onderzoekers van het Reconfigurable Robotics Lab (RRL) van de École Polytechnique Fédèrale de Lausanne (EPFL) hebben onlangs een nieuwe benadering ontwikkeld voor de herconfiguratie van modulaire robots die is geïnspireerd op de kunst van origami. Deze methode, geschetst in een paper gepubliceerd in Sage's International Journal of Robotics Research , elimineert connectiviteitsveranderingen tijdens de transformatie van een systeem.
Modulaire herconfigureerbare robots zijn veelzijdige systemen die hun vorm kunnen transformeren om verschillende taken in verschillende omgevingen uit te voeren. Dit kan met name handig zijn in op missies gebaseerde instellingen, zoals ruimte, herkenning, bemonstering, of zoek- en reddingsoperaties. In deze gevallen, conventionele robots met een vaste morfologie kunnen moeite hebben om zich aan te passen aan complexe en onzekere omgevingen, terwijl modulaire robotsystemen zich autonoom kunnen herconfigureren en aanpassen aan nieuwe omstandigheden.
De herconfigureerbaarheid van modulaire systemen wordt bereikt door de morfologie van hun algehele structuur te veranderen, evenals door hun modules aan te sluiten en los te koppelen. Ondanks de opmerkelijke voordelen van het gebruik van deze systemen, het grote aantal afzonderlijke componenten en vrijheidsgraden (DoF's) maken het wijzigen van hun configuratie zeer uitdagend.
Om dit proces te plannen en te optimaliseren, eerdere studies hebben verschillende benaderingen voorgesteld, die kunnen worden onderverdeeld in twee hoofdcategorieën. De eerste categorie omvat doelconfiguratie door de modulaire architectuur van het systeem te verdelen in verschillende sets modules, wat het herconfiguratieproces kan vereenvoudigen. Deze benaderingen kunnen het ontwerp van de uiteindelijke configuratie voor specifieke taken vergemakkelijken, toch slagen ze er niet in om het dynamische herconfiguratieproces aan te pakken.
Een andere benadering voor het optimaliseren van herconfiguratie is het minimaliseren van het aantal connectiviteitsveranderingen wanneer het systeem in de gewenste vorm verandert. Hoewel deze herconfiguratieplanners gericht zijn op het verminderen van het aantal connectiviteitswijzigingen, ze vereisen nog steeds een vorm van loskoppelen en verbinden tussen modules in het proces. Deze connectiviteitswijzigingen zijn tijdrovend, kan complicaties veroorzaken in de algehele transformatie en kan leiden tot verkeerde uitlijning, leidend tot de mechanische storing van het systeem.
De beperkingen van bestaande benaderingen aanpakken, het team van onderzoekers van RRL introduceerde een nieuwe strategie voor het plannen van de herconfiguratie van modulaire robotsystemen, die put uit het proces van het vouwen van origami. Origami is de traditionele Japanse kunst van het vouwen van platte vellen papier in een verscheidenheid aan 3D-objecten of vormen.
"Onze methode bestaat uit een energie-optimale herconfiguratieplanner die een eerste 2D-montagepatroon en een bedieningsvolgorde van de modulaire eenheden genereert, beide resulterend in een minimaal energieverbruik, ’ schreven de onderzoekers in hun paper.
Het door de onderzoekers bedachte algoritmische raamwerk omvat twee hoofdcomponenten:een automatisch modelleringsalgoritme en een heuristisch algoritme. Het automatische modelleringsalgoritme genereert het kinematische model en dynamische afleiding van robotaggregaten, het berekenen van het koppelverbruik van pre-vouwpatronen voor vooraf gedefinieerde vouwsequenties en het gebruik van bewegingsplanning om rekening te houden met de dikte van de constructie. Het heuristische algoritme, anderzijds, omvat een optimale 2D-lay-outplanner gevolgd door twee vouwvolgordeplanners:een uniforme bedieningsplanner voor verschillende lay-outs en een optimale planner binnen een specifieke lay-out.
De nieuwe aanpak die bij RRL is bedacht, pakt effectief het NP-complete probleem aan van energie-optimale herconfiguratieplanning in modulaire robots, het genereren van energie-optimale herconfiguratieschema's voor de initiële montage- en vouwvolgorde van de systeemmodules. De onderzoekers evalueerden hun strategie met behulp van simulaties op Mori, een modulair robotplatform, en boekte veelbelovende resultaten.
"We demonstreren de effectiviteit van onze methode door de algoritmen toe te passen op Mori, een modulaire origami-robot, bij simulatie, " schreven de onderzoekers in hun paper. "Onze resultaten laten zien dat het heuristische algoritme herconfiguratieschema's van hoge kwaliteit oplevert, vergeleken met het automatische modelleringsalgoritme, tegelijkertijd een aanzienlijke hoeveelheid rekentijd en moeite besparen."
© 2018 Wetenschap X Netwerk
 Symmetrische splitsing van disulfiden is snel en biocompatibel
Symmetrische splitsing van disulfiden is snel en biocompatibel- Onderzoekers onthullen spannende nieuwe manier om farmaceutische ingrediënten goedkoper en veiliger te produceren
- Nobelprijs voor baanbrekende manier om moleculen te bouwen die chemie groener maakten
- Insectenantibioticum biedt nieuwe manier om bacteriën te elimineren
- Loden leidingen veilig maken
- Kansen in het voordeel van Greta Thunberg voor de Vredesprijs, maar experts sceptisch
- China is een hotspot van ozonvervuiling op leefniveau
- Geologische vingerafdrukken van vulkanische as
- Klimaatplan Bidens kan de opwarming van de aarde met ongeveer 0,1 ° C verminderen
- Elektronische luchtreinigingstechnologie kan onbedoelde verontreinigende stoffen genereren
Hoofdlijnen
- Designergist verbruikt plantaardig materiaal en spuugt vetalcoholen uit voor wasmiddelen en biobrandstoffen
- Onderzoek naar parasieten effent de weg voor infectietherapieën
- Gedachtenexperiment:wat is ons transhumane pad voorbij de aarde?
- Survival of the least-fit:antiviraal middel richt zich selectief op de meest onaangename virussen
- Mexico vangt zeldzame vaquita-bruinvis om soorten te redden
- Wat is late telofase?
- Hoe herstelt de huid?
- Wat zijn Prions?
- Zelfs koude harde contanten zijn niet genoeg stimulans om naar tegengestelde meningen te luisteren
- Nieuw augmented reality-systeem stelt smartphonegebruikers in staat om virtuele objecten te gebruiken

- Algoritme ontwerpt geoptimaliseerde modellen voor machine learning die tot 200 keer sneller zijn dan traditionele methoden

- Saoedi-Arabië schakelt over op kernenergie om olieverslaving te beteugelen

- Hoe digitale tweelingen de toekomst van onderhoud en productie sturen
- Een nieuw model om afbeeldingen op basis van schetsen op te halen

 Onderzoek naar kwantumcorrelaties van klassieke lichtbronnen voor beeldtransmissie
Onderzoek naar kwantumcorrelaties van klassieke lichtbronnen voor beeldtransmissie- COVID-19-lockdowns kunnen leiden tot sociale onrust, volgens nieuw onderzoek
- Klimaatverandering en duurzame levensstijl
- Sociaal psycholoog biedt sleutel tot het beëindigen van racisme
- De meeste Angelenos zeggen dat klimaatverandering een bedreiging is, maar weinigen handelen ernaar
- Synthetische chemicaliën:genegeerde agenten van wereldwijde verandering
- Taal is belangrijk wanneer de aarde zich midden in een klimaatcrisis bevindt
- De toekomst cementeren
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
