Wetenschap
De fysieke structuur van robots evolueren om de prestaties in verschillende omgevingen te verbeteren
Poten bevestigd aan een van de hexapoden van de onderzoekers. Krediet:Collins et al.
Onderzoekers van CSIRO &Queensland University of Technology hebben onlangs een onderzoek uitgevoerd om de fysieke structuur van robots automatisch te ontwikkelen om hun prestaties in verschillende omgevingen te verbeteren. Dit project, gefinancierd door CSIRO's Active Integrated Matter Future Science Platform, werd bedacht door David Howard, onderzoekswetenschapper bij Data61's Robotics and Autonomous Systems Group (RASG).
"RASG richt zich op veldrobotica, wat betekent dat we onze robots nodig hebben om naar afgelegen plaatsen te gaan en missies uit te voeren in ongunstige, moeilijke omgevingsomstandigheden, David Howard vertelde TechXplore. "Het onderzoek kwam tot stand door een geïdentificeerde kans, aangezien RASG uitgebreid gebruik maakt van 3D-printen om onze robots te bouwen en aan te passen. Dit onderzoek demonstreert een ontwerpalgoritme dat automatisch 3D-printbare componenten kan genereren, zodat onze robots beter zijn uitgerust om in verschillende omgevingen te functioneren."
Het hoofddoel van het onderzoek was om automatisch componenten te genereren die de omgevingsspecifieke prestaties van een robot kunnen verbeteren, met minimale beperkingen op hoe deze componenten eruit zien. De onderzoekers richtten zich vooral op de poten van een zespotige robot met zes poten, die in verschillende omgevingen kan worden ingezet, inclusief industriële omgevingen, regenwouden, en stranden.
"De poten zijn gemakkelijk om te zetten in 3D-printbare bestanden, zodat we de poten gemakkelijk kunnen afdrukken en op onze hexapoden kunnen klikken voor gebruik, Howard zei. „Wij veronderstelden dat het veranderen van de vorm van de benen ons verschillende prestaties zou geven en het document beschrijft een vroege demonstratie van dit vermogen. We hebben ons laten inspireren door de krachtigste creatieve kracht ter wereld, een die keer op keer vormen creëert die functioneren in soms zeer moeilijke omgevingsomstandigheden:evolutie."
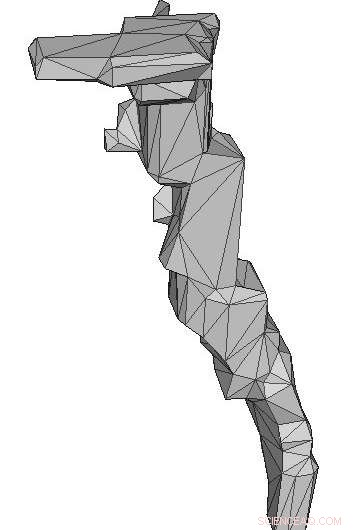
Een poot geoptimaliseerd voor harde bodemoppervlakken. Krediet:Collins et al.
Het door Howard en zijn collega's ontwikkelde systeem maakt gebruik van een genetisch algoritme om verzamelingen van Bezier-splines te optimaliseren (3D-versies van de 'curve'-tool op Microsoft Paint), het bepalen van de vorm van het scheenbeen van de robot. De ontwerpen van kandidaat-benen worden geoptimaliseerd op basis van hoe geschikt ze zijn voor een bepaalde omgeving. In hun studie hebben deze optimalisatie was gebaseerd op een functie van de energie die nodig is om door een omgeving te lopen en de hoeveelheid materiaal die nodig is om het been te maken.
"We beginnen met een populatie van willekeurige benen, beoordelen in een high-fidelity gesimuleerde omgeving (grind, harde aarde en water waren degenen waar we ons op concentreerden) en hun fitnessscores krijgen, Howard legde uit. "Deze scores worden gebruikt om een 'survival of the fittest'-selectieproces te implementeren, zodat goede benen behouden blijven en slechte benen worden 'gedood'. De goede benen krijgen dan de kans om zich voort te planten, met behulp van analogen van crossover, waarbij een kinderbeen kenmerken heeft van twee ouderbenen, en door mutatie, waar kenmerken van de vormen willekeurig worden gewijzigd."
Met deze benadering kan het algoritme zoeken naar goede vormen om op de benen van de robot aan te brengen, binnen een ruimte van mogelijke oplossingen. De onderzoekers genereerden een aantal kinderbenen en lieten ze vervolgens 'concurreren' met ouderbenen om te bepalen welke in de volgende generatieronde zouden worden opgenomen. De vorm van de poten van de robot werd in de loop van de tijd automatisch geoptimaliseerd, na honderden van dergelijke generaties.
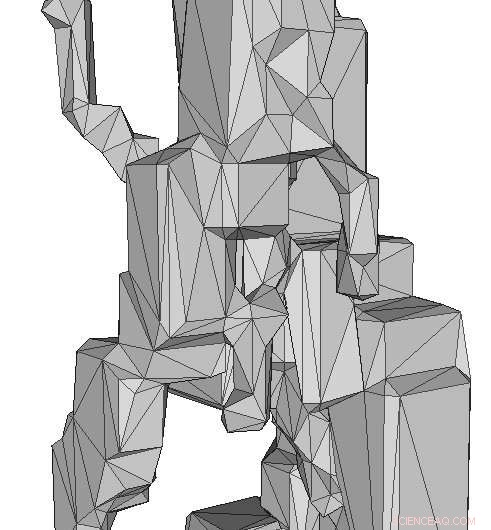
Een been geoptimaliseerd voor grindoppervlakken. Krediet:Collins et al.
"We waren in staat om milieuspecialisatie aan te tonen in de populaties van poten, Howard zei. "Ze evolueerden automatisch zodat, bijvoorbeeld, grotere voetafdrukken werden consequent gezien in benen die waren geëvolueerd om in grind te lopen, omdat dit voorkomt dat het been in het grind glijdt en vast komt te zitten, of overmatige energie verbruiken om het been te verwijderen. Op harde grond, anderzijds, de benen werden dunner omdat er geen straf was om een kleinere voetafdruk te hebben."
De onderzoekers ontdekten dat de geproduceerde benen inderdaad 'niched, ' in evolutionaire zin. Met andere woorden, de vorm van de benen varieerde sterk, omdat ze waren geëvolueerd om het beste te werken in verschillende omgevingen.
-
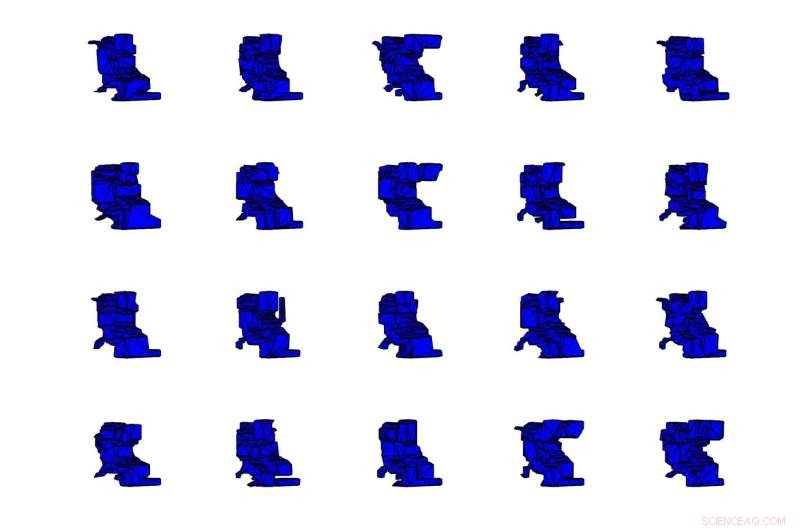
Afbeelding laat zien wat er gebeurt als we een been muteren - merk op dat ze allemaal een beetje anders zijn. Dit komt door de 'genetische' mutatie die we doen op de Bezier-curven. Sommige van deze variaties zullen gunstig zijn en sommige zullen nadelig zijn, omdat we selecteren op basis van fitness, blijven de voordeligere mutaties waarschijnlijk behouden. Krediet:Collins et al.
-
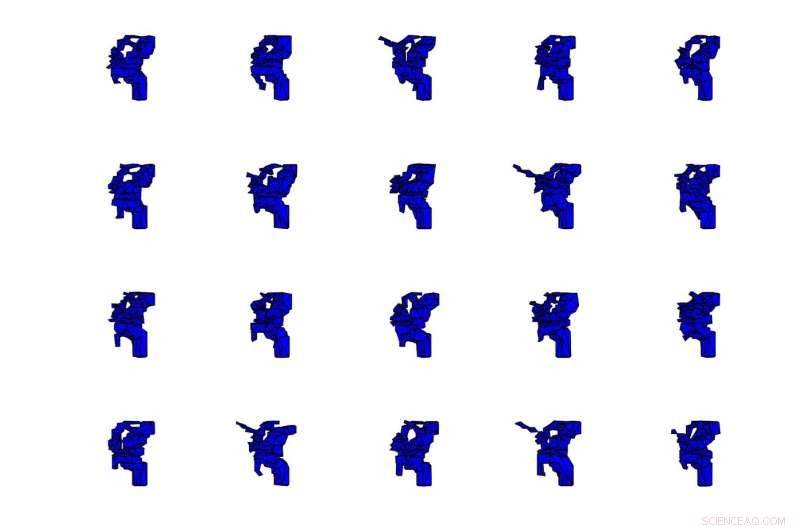
Afbeelding laat zien wat er gebeurt als we een been muteren - merk op dat ze allemaal een beetje anders zijn. Dit komt door de 'genetische' mutatie die we doen op de Bezier-curven. Sommige van deze variaties zullen gunstig zijn en sommige zullen nadelig zijn, omdat we selecteren op basis van fitness, blijven de voordeligere mutaties waarschijnlijk behouden. Krediet:Collins et al.
"Qua prestaties, te, een optimaal been voor de ene omgeving was niet zo optimaal in andere omgevingen, Howard zei. "Dit is belangrijk omdat het laat zien dat ons algoritme omgevingsspecifieke vormen creëert."
De studie van Howard en zijn collega's zou een belangrijke eerste stap kunnen zijn in de richting van de ontwikkeling van robots die het best zijn toegerust om in verschillende omgevingen te werken. Tot dusver, ze hebben alleen gegenereerde benen geëvalueerd in simulaties. Voordat ze kunnen worden ingezet, daarom, de onderzoekers zullen hun ontwerpen in de echte wereld moeten testen en bewijzen dat ze beter presteren dan conventionele benen.

Poten bevestigd aan een van de hexapoden van de onderzoekers. Krediet:Collins et al.
"We willen ook overwegen om evolutie te gebruiken om verschillende materiaalsoorten in de poten te selecteren, Howard zei. "We kunnen 3D-printen met meerdere materialen gebruiken om poten te maken die zijn gemaakt met verschillende soorten materialen, waarvan we verwachten dat het het vermogen van de benen om goed te werken in verschillende omgevingen verder zal verbeteren. We zijn ook begonnen met het gebruik van complexere representaties voor de beenvormen, in dit geval, neurale netwerken genaamd compositorische patroon producerende netwerken, die de vorm en materiaaleigenschappen van de poten kan specificeren zonder beperkt te zijn tot Bezier-achtige geometrieën."
© 2018 Tech Xplore
 Hoe bouwen bacteriën natuurlijke producten op?
Hoe bouwen bacteriën natuurlijke producten op?- Ambrosia-verbindingen kunnen zenuwcellen beschermen tegen Alzheimer
- Nieuwe chemische methode maakt het gemakkelijker om vervuilende pesticiden uit water te halen
- Hoe moleculen om te zetten in Atoms
- Door koper gekatalyseerde enantioselectieve trifluormethylering van benzylische radicalen ontwikkeld
Hoofdlijnen
- Wat veroorzaakt DNA-mutatie?
- Wetenschappers zoeken naar overlevenden nadat de Thomas-brand een condorreservaat heeft verschroeid
- Vereiste chemische reacties om homeostase te handhaven
- De evolutionaire oorsprong van de darm
- Onderzoek naar klimaatverandering van de achteruitgang van de jongen van lederschildpadden levert geen antwoorden op
- Maleisië redt 140 schubdieren van vermoedelijke smokkelaars
- Inspanningen zijn bedoeld om de verspreiding van vuurmieren in de VS te beperken
- Hoeveel zintuigen heeft een mens?
- De voordelen van over jezelf praten in de derde persoon
- NTSB overweegt technologie om ongelukken te voorkomen, gesloten gesprekken

- Facebook-gebruikers eisen Cambridge Analytica-geheimen in faillissement

- Gesprekken om de grootste telecomoperator van Azië op te richten vallen uit elkaar

- Zonne-energieoplossingen voor gevels

- Uber getroffen met class action Australië voorafgaand aan beursnotering


 Renault-auto's spelen rol in energie-ecosysteem voor eilandbewoners
Renault-auto's spelen rol in energie-ecosysteem voor eilandbewoners- Wat is Nadph in fotosynthese?
- Moon Rock Hunter op zoek naar Apollo-geschenken
- 10 jaar van de gevangen regenboog - de revolutie van langzaam licht
- Eclipse Megamovie-project zoekt hulp bij het analyseren van 50, 000 foto's
- IBM-doorbraak legt snelle metingen van individuele atomen vast
- Hoe lood werkt
- Hoe Bitcoin de planeet vervuilt
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
