Wetenschap
De lus sluiten voor robotgrijpen
Krediet:Queensland University of Technology
Robotici bij QUT hebben een snellere en nauwkeurigere manier ontwikkeld waarop robots objecten kunnen grijpen, ook in rommelige en veranderende omgevingen, die het potentieel heeft om hun bruikbaarheid in zowel industriële als huishoudelijke omgevingen te verbeteren.
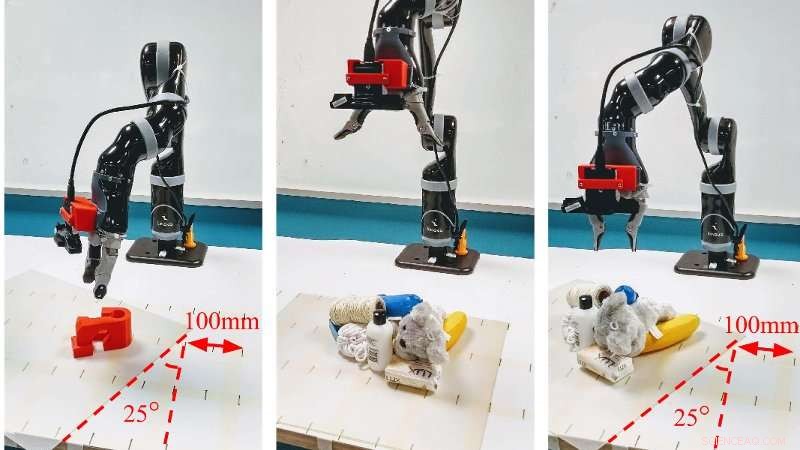
- Met de nieuwe aanpak kan een robot snel de omgeving scannen en elke pixel die hij vastlegt in kaart brengen met zijn grijpkwaliteit met behulp van een dieptebeeld
- Tests uit de echte wereld hebben hoge nauwkeurigheidspercentages behaald tot 88% voor dynamisch grijpen en tot 92% in statische experimenten.
- De aanpak is gebaseerd op een Generative Grasping Convolutional Neural Network
Dr. Jürgen Leitner van QUT zei dat het vastpakken en oppakken van een object een basistaak is voor mensen, het was ongelooflijk moeilijk gebleken voor machines.
"We hebben robots kunnen programmeren, in zeer gecontroleerde omgevingen, om zeer specifieke items op te halen. Echter, een van de belangrijkste tekortkomingen van de huidige robotgrijpsystemen is het onvermogen om zich snel aan te passen aan veranderingen, zoals wanneer een object wordt verplaatst, ' zei Dr. Leitner.
"De wereld is niet voorspelbaar - dingen veranderen en bewegen en raken in de war en, vaak, dat gebeurt zonder waarschuwing - dus robots moeten zich kunnen aanpassen en werken in zeer ongestructureerde omgevingen als we willen dat ze effectief zijn, " hij zei.
De nieuwe methode, ontwikkeld door Ph.D. onderzoeker Douglas Morrison, Dr. Leitner en Distinguished Professor Peter Corke van de wetenschappelijke en technische faculteit van QUT, is een realtime, objectonafhankelijke greepsynthesemethode voor gesloten lusgrijpen.
"De Generative Grasping Convolutional Neural Network-benadering werkt door de kwaliteit en pose van een tweevingerige greep op elke pixel te voorspellen. Door in één keer in kaart te brengen wat ervoor staat met behulp van een dieptebeeld, de robot hoeft niet veel verschillende mogelijke grepen te testen voordat hij een beslissing neemt, lange rekentijden vermijden, ' zei meneer Morrison.
"In onze praktijktests, we behaalden een slagingspercentage van 83% op een reeks voorheen onzichtbare objecten met een vijandige geometrie en 88% op een reeks huishoudelijke voorwerpen die tijdens de grijppoging werden verplaatst. We bereiken ook een nauwkeurigheid van 81% bij het grijpen in dynamische rommel."
Dr. Leitner zei dat de aanpak een aantal beperkingen van de huidige deep-learning grijptechnieken overwon.
"Bijvoorbeeld, in de Amazon Picking Challenge, die ons team won in 2017, onze robot CartMan zou in een bak met objecten kijken, een beslissing nemen over waar de beste plaats was om een object vast te pakken en dan blindelings naar binnen gaan om te proberen het op te rapen, " hij zei
"Met deze nieuwe methode, we kunnen beelden van de objecten die een robot bekijkt binnen ongeveer 20 milliseconden verwerken, waardoor de robot zijn beslissing over waar een object moet worden vastgepakt, kan bijwerken en dit vervolgens met een veel groter doel kan doen. Dit is vooral belangrijk in rommelige ruimtes, " hij zei.

Krediet:Queensland University of Technology
Dr. Leitner zei dat de verbeteringen waardevol zouden zijn voor industriële automatisering en in huishoudelijke omgevingen.
"Deze onderzoekslijn stelt ons in staat om robotsystemen niet alleen in gestructureerde omgevingen te gebruiken waar de hele fabriek is gebouwd op basis van robotcapaciteiten. Het stelt ons ook in staat om objecten in ongestructureerde omgevingen te grijpen, waar dingen niet perfect gepland en geordend zijn, en robots moeten zich aanpassen aan veranderingen.
"Dit heeft voordelen voor de industrie - van magazijnen voor online winkelen en sorteren, tot fruit plukken. Het kan ook in huis worden toegepast, naarmate er meer intelligente robots worden ontwikkeld om niet alleen een vloer te stofzuigen of te dweilen, maar ook om spullen op te halen en op te bergen."
De paper van het team Closing the Loop for Robotic Grasping:A Real-time, Generative Grasp Synthesis Approach wordt deze week gepresenteerd op Robotics:Science and Systems, de meest selectieve internationale roboticaconferentie, die wordt gehouden aan de Carnegie Mellon University in Pittsburgh, VS.
 Astrochemie:hoe het leven in de ruimte kan zijn begonnen
Astrochemie:hoe het leven in de ruimte kan zijn begonnen- Lijst van positieve en negatieve ionen
- De rol van vastestofchemie bij de ontwikkeling van metaal-ionbatterijen
- Doorbraak in lignine-onderzoek - bolvormige deeltjes vermenigvuldigen de enzymefficiëntie
- Koolzuur in frisdranken meten voor een wetenschappelijk project
- 5 leuke Earth Day-spellen voor kinderen
- Natuurbrand in Spanje uit de hand tijdens hittegolf in Europa
- Naarmate de droogte verergert, Californische boeren worden betaald om geen gewassen te verbouwen
- Veerkracht aanpakken:orde in chaos vinden om klimaatverandering tegen te gaan
- Informatie over woestijndieren & planten
Hoofdlijnen
- Hoe zijn fytoplankton reproductie?
- Hoe is de taal geëvolueerd?
- Studie belicht botanische vooroordelen
- Great Basin zaadstudie-experiment richt zich op herstel van weidegronden
- Hoe wordt DNA-splitsing gebruikt in de biotechnologie?
- De mens als model voor het begrijpen van biologische fundamenten
- Koolwaterstofafbrekende schimmel geeft zijn geheimen prijs
- Wat wordt geoxideerd en wat wordt er gereduceerd in celademhaling?
- Welk enzym is verantwoordelijk voor het verlengen van de RNA-keten?
- Ingenieurs stroomlijnen het ontwerp van straalmotoren
- Airbus viert eerste vlucht van zijn nieuwe walvis in de lucht

- Nu de Amerikaanse verkoopgolf voorbij is, autofabrikanten gaan in de modus voor het aanspannen van de riem

- Lopende robots, een YouTube-sensatie, maak je klaar voor de markt

- WhatsApp uit om geld te verdienen met zakelijke berichten


 NJIT-professor wiskundige wetenschappen publiceert voorspellingen voor Major League Baseball
NJIT-professor wiskundige wetenschappen publiceert voorspellingen voor Major League Baseball- De meeste mensen overwegen om vegetariër te worden vanwege hun gezondheid
- Zijn de reuzenlibellen uit het paleozoïcum nog steeds onder ons?
- Onderzoek suggereert dat het vergroten van de gemeenschapsband tussen politie en jonge zwarte mannen gewelddadige ontmoetingen kan verminderen
- Advertentiebusiness een zegen voor Amazon, maar een afknapper voor shoppers
- Focus op een versterkend leeralgoritme dat kan leren van fouten
- Conserveringslandbouw biedt vermoeide bodemremedies
- Het grote structurele voordeel Eukaryoten hebben over prokaryoten
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
