Wetenschap
Hoe u uw robot kunt trainen:onderzoek biedt nieuwe benaderingen
Reinforcement learning is een vorm van machinaal leren waarbij een agent leert door interactie met zijn omgeving en beloningen ontvangt voor zijn acties. In de context van robottraining kunnen versterkende leeralgoritmen de robot in staat stellen met vallen en opstaan te leren hoe hij een taak moet uitvoeren, zoals het navigeren door een hindernisbaan. De robot ontvangt positieve beloningen voor succesvolle acties en negatieve beloningen voor acties die tot mislukkingen leiden, waardoor hij leert welke acties hij in verschillende situaties moet ondernemen.
2. Imitatieleren
Imitatieleren is een methode om robots te trainen door ze het gedrag van mensen of andere robots te laten observeren en imiteren. De robot kan worden getraind met behulp van technieken als omgekeerd bekrachtigingsleren, waarbij hij de beloningsfunctie leert die het gedrag dat hij waarneemt stuurt, en vervolgens bekrachtigingsleren gebruikt om zijn beleid te optimaliseren om de beloning te maximaliseren. Deze aanpak kan bijzonder effectief zijn voor taken die menselijke behendigheid en hand-oogcoördinatie vereisen, zoals het vastpakken van voorwerpen of het bespelen van muziekinstrumenten.
3. Leren zonder toezicht
Unsupervised learning is een techniek waarbij een robot leert van ongelabelde data zonder expliciet de juiste antwoorden te krijgen. Deze aanpak is geschikt voor taken waarbij de gelabelde gegevens beperkt zijn, en stelt de robot in staat belangrijke patronen en relaties binnen de gegevens te ontdekken. Een voorbeeld is het gebruik van onbewaakt leren om de robot te leren een object in verschillende omgevingen te herkennen en te lokaliseren door veel afbeeldingen van het object aan te bieden en hem onderscheidende kenmerken te laten leren identificeren.
4. Breng leren over
Transfer learning is een methodologie waarbij een robot kennis die eerder voor de ene taak is verworven, gebruikt om een andere gerelateerde taak te leren. Dit kan de hoeveelheid tijd en moeite die nodig is voor training aanzienlijk verminderen. Een robot die is getraind om door een gesimuleerde binnenomgeving te navigeren, kan zich bijvoorbeeld aanpassen aan een echte buitenomgeving door zijn eerdere kennis over te dragen.
5. Meta-leren
Meta-leren, ook wel leren leren genoemd, stelt robots in staat effectiever te leren leren over verschillende taken heen. Het is een vorm van leren van een hogere orde, waarbij de robot in plaats van één enkele taak leert, sneller en efficiënter nieuwe taken leert verwerven. Deze mogelijkheid kan bijzonder waardevol zijn in dynamische en veranderende omgevingen.
Dit zijn slechts enkele van de onderzoeksgestuurde benaderingen die vormgeven aan de manier waarop we robots trainen, die elk unieke voordelen bieden, afhankelijk van de taak en de beschikbare middelen. Naarmate het onderzoek vordert en er nieuwe technieken ontstaan, zal het vakgebied van de robotica de grenzen blijven verleggen van wat mogelijk is op het gebied van robotleren en -aanpassing.
 Uit onderzoek blijkt dat de afname van het zee-ijs de boomgrens naar het noorden helpt verspreiden
Uit onderzoek blijkt dat de afname van het zee-ijs de boomgrens naar het noorden helpt verspreiden - Wat is het verschil tussen dikke en dunne atmosferen?
- Hoe kolibries evolueerden om op grote hoogte te vliegen
- Culturele kruisbestuiving om bodems te redden
- Potentiële tropische cycloon 10 weken Midden-Atlantische Oceaan
Hoofdlijnen
- Een biologische whodunnit:helpen knaagdieren bomen tegen brand te beschermen?
- Ontdekking werpt licht op hoe gewervelde dieren zien
- Hoe boerderijen kunnen helpen het eigen microbioom van de aarde te verdedigen
- Jura-dinosaurus met vogelschild was een van de eersten die in kuddes leefde
- Kunnen de honden van Tsjernobyl ons nieuwe overlevingstrucs leren?
- Wat is landbouwbiotechnologie? | Hoe dingen werken
- Inzicht in hoe cellen reageren op fysieke signalen zou tot nieuwe ziektebehandelingen kunnen leiden
- Abiogenese: definitie, theorie, bewijs & voorbeelden
- Wat hondeneigenaren moeten weten over leptospirose
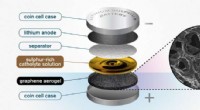
- Grafeenspons helpt lithiumzwavelbatterijen nieuw potentieel te bereiken
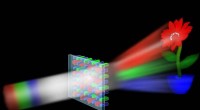
- Zeer efficiënte kleurenhologrammen gemaakt met behulp van een meta-oppervlak gemaakt van nanoblokken
- Baanbrekende productiemethode zou de wereldwijde grafeenrevolutie kunnen versnellen
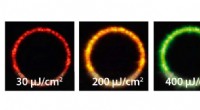
- Quantum dot-ringlasers zenden gekleurd licht uit
- Nieuwe sensor zorgt voor betere lekbescherming in gebouwen


 China, Japan haalt brandbaar ijs uit de zeebodem
China, Japan haalt brandbaar ijs uit de zeebodem- Er is meer nodig dan goede bedoelingen om de afvalbergen van Nairobis op te ruimen
- Een nieuwe manier om te meten hoe water beweegt
- Chronische verspillende ziekte:de problemen met de prionziekte van hertachtigen aanpakken
- Boeing hoopt nog steeds dat 737 Max dit jaar weer gaat vliegen
- Zuckerberg wordt geconfronteerd met vragen van opa van wetgevers
- $ 169 miljard voor 29, 000 levens? Studie berekent kosten van Amerikaanse shutdowns
- Tienvoudige toename van het vermogen om eiwitten in kankercellen te lokaliseren
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
