Wetenschap
10 moeilijkste dingen om een robot te leren
 Hallo, robots kunnen vangst spelen. Robot Justin, een mensachtig tweearmig systeem, ontwikkeld door de Duitse lucht- en ruimtevaartorganisatie, Deutsches Zentrum für Luft- und Raumfahrt, kan bepaalde taken autonoom uitvoeren, zoals ballen vangen of koffie schenken. Bekijk meer robotfoto's. © Michael Dalder/Reuters/Corbis
Hallo, robots kunnen vangst spelen. Robot Justin, een mensachtig tweearmig systeem, ontwikkeld door de Duitse lucht- en ruimtevaartorganisatie, Deutsches Zentrum für Luft- und Raumfahrt, kan bepaalde taken autonoom uitvoeren, zoals ballen vangen of koffie schenken. Bekijk meer robotfoto's. © Michael Dalder/Reuters/Corbis Een mens zijn is veel gemakkelijker dan een mens bouwen.
Neem zoiets eenvoudigs als een vangst met een vriend in de voortuin. Wanneer je deze activiteit opsplitst in de afzonderlijke biologische functies die nodig zijn om het te bereiken, het is helemaal niet eenvoudig. Je hebt sensoren nodig, zenders en effectoren. U moet berekenen hoe hard u moet werpen op basis van de afstand tussen u en uw metgezel. Je moet rekening houden met schittering van de zon, windsnelheid en afleiding in de buurt. Je moet bepalen hoe stevig je de bal moet vasthouden en wanneer je de handschoen moet knijpen tijdens een vangst. En je moet een aantal wat-als-scenario's kunnen verwerken:Wat als de bal over mijn hoofd gaat? Wat als het de straat op rolt? Wat als het door het raam van mijn buurman crasht?
Deze vragen demonstreren enkele van de meest urgente uitdagingen van robotica, en zij vormden het toneel voor ons aftellen. We hebben een lijst samengesteld met de 10 moeilijkste dingen om robots te leren, grofweg geordend van "gemakkelijk" tot "moeilijkst" -- 10 dingen die we moeten overwinnen als we ooit de beloften van Bradbury willen waarmaken, Dick, Asimov, Clarke en alle andere verhalenvertellers die zich een wereld hebben voorgesteld waarin machines zich gedragen als mensen.
Inhoud- Blaas een spoor
- Behendigheid tonen
- Een gesprek houden
- Nieuwe vaardigheden verwerven
- Oefen misleiding
- Anticipeer op menselijke acties
- Activiteiten coördineren met een andere robot
- Kopieën van zichzelf maken
- Handelen op basis van ethische principes
- Emoties voelen
10:Blaze een spoor
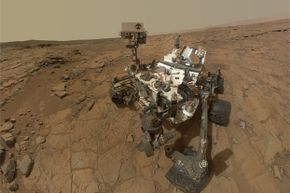 De ultieme navigatietest voor een robot:Mars! Tot dusver, Nieuwsgierigheid heeft bewezen behoorlijk bedreven te zijn. Afbeelding met dank aan NASA/JPL-Caltech/MSSS
De ultieme navigatietest voor een robot:Mars! Tot dusver, Nieuwsgierigheid heeft bewezen behoorlijk bedreven te zijn. Afbeelding met dank aan NASA/JPL-Caltech/MSSS Verhuizen van punt A naar punt B klinkt zo eenvoudig. Wij mensen doen het de hele dag, elke dag. Voor een robot, Hoewel, navigatie - vooral door een enkele omgeving die constant verandert of tussen omgevingen die het nog nooit eerder is tegengekomen - kan lastig zijn. Eerst, de robot moet zijn omgeving kunnen waarnemen, en dan moet het in staat zijn om de binnenkomende gegevens te begrijpen.
Robotici pakken het eerste probleem aan door hun machines te bewapenen met een reeks sensoren, scanners, camera's en andere hightech tools om hun omgeving te beoordelen. Laserscanners worden steeds populairder, hoewel ze niet kunnen worden gebruikt in aquatische omgevingen omdat water de neiging heeft om het licht te verstoren en het bereik van de sensor drastisch vermindert. Sonartechnologie biedt een haalbare optie in onderwaterrobots, maar in toepassingen op het land, het is veel minder nauwkeurig. En, natuurlijk, een zichtsysteem bestaande uit een set geïntegreerde stereoscopische camera's kan een robot helpen zijn landschap te "zien".
Het verzamelen van gegevens over het milieu is slechts het halve werk. De grotere uitdaging is het verwerken van die gegevens en het gebruiken ervan om beslissingen te nemen. Veel onderzoekers laten hun robots navigeren door een vooraf gespecificeerde kaart te gebruiken of on-the-fly een kaart te construeren. Bij robotica, dit staat bekend als DICHTSLAAN -- gelijktijdige lokalisatie en mapping . Mapping beschrijft hoe een robot informatie die met zijn sensoren is verzameld, omzet in een bepaalde representatie. Lokalisatie beschrijft hoe een robot zichzelf positioneert ten opzichte van de kaart. In praktijk, deze twee processen moeten gelijktijdig plaatsvinden, het creëren van een kip-en-ei-raadsel dat onderzoekers hebben kunnen overwinnen met krachtigere computers en geavanceerde algoritmen die positie berekenen op basis van waarschijnlijkheden.
9:Behendigheid tonen
 Twindy-One, een robot gericht op het helpen van ouderen en gehandicapten in huis, demonstreert zijn vermogen om delicate voorwerpen vast te houden door een rietje tussen zijn vingers te manipuleren op de Waseda University in Tokio op 8 januari, 2009. © Issei Kato/Reuters/Corbis
Twindy-One, een robot gericht op het helpen van ouderen en gehandicapten in huis, demonstreert zijn vermogen om delicate voorwerpen vast te houden door een rietje tussen zijn vingers te manipuleren op de Waseda University in Tokio op 8 januari, 2009. © Issei Kato/Reuters/Corbis Robots halen al jaren pakketten en onderdelen op in fabrieken en magazijnen. Maar over het algemeen vermijden ze mensen in deze situaties, en ze werken bijna altijd met consistent gevormde objecten in een overzichtelijke omgeving. Het leven is veel minder gestructureerd voor elke robot die zich buiten de fabrieksvloer waagt. Als zo'n machine ooit hoopt te werken in huizen of ziekenhuizen, het heeft een geavanceerd tastgevoel nodig dat in staat is om mensen in de buurt te detecteren en een item uit een rommelige verzameling spullen te plukken.
Dit zijn moeilijke vaardigheden voor een robot om te leren. traditioneel, wetenschappers vermeden aanraking helemaal, het programmeren van hun machines om te mislukken als ze contact maken met een ander object. Maar in de afgelopen vijf jaar of zo, er zijn aanzienlijke vorderingen gemaakt op het gebied van conforme ontwerpen en kunstmatige huid. Nakoming verwijst naar het flexibiliteitsniveau van een robot. Zeer flexibele machines voldoen beter aan de eisen; starre machines zijn dat minder.
In 2013, Georgia Tech-onderzoekers bouwden een robotarm met veren voor gewrichten, waardoor het aanhangsel meer als een menselijke arm kan buigen en communiceren met zijn omgeving. Volgende, ze bedekten het hele ding met een "huid" die druk of aanraking kon voelen. Sommige robothuiden bevatten in elkaar grijpende zeshoekige printplaten, elk met infraroodsensoren die alles kunnen detecteren dat dichterbij dan een centimeter komt. Anderen zijn uitgerust met elektronische "vingerafdrukken" - verhoogde en geribbelde oppervlakken die de grip verbeteren en de signaalverwerking vergemakkelijken.
Combineer deze hightech armen met verbeterde zichtsystemen, en je krijgt een robot die een tedere streling kan bieden of in kasten kan reiken om één item uit een grotere collectie te selecteren.
8:Voer een gesprek
 Mechatronica-ingenieur Ben Schaefer werkt samen met humanoïde robotbarman Carl terwijl hij een drankje bereidt in de Robots Bar and Lounge in Duitsland op 26 juli. 2013. Ontwikkeld door Schäfer, Carl kan ook in kleine gesprekken met klanten communiceren. © Fabrizio Bensch/Reuters/Corbis
Mechatronica-ingenieur Ben Schaefer werkt samen met humanoïde robotbarman Carl terwijl hij een drankje bereidt in de Robots Bar and Lounge in Duitsland op 26 juli. 2013. Ontwikkeld door Schäfer, Carl kan ook in kleine gesprekken met klanten communiceren. © Fabrizio Bensch/Reuters/Corbis Alan M. Turing, een van de grondleggers van de informatica, deed in 1950 een gewaagde voorspelling:op een dag zouden machines zo vloeiend kunnen spreken dat we ze niet meer van mensen zouden kunnen onderscheiden. Helaas, robots (zelfs Siri) hebben nog niet aan de verwachtingen van Turing voldaan. Dat komt omdat spraakherkenning heel anders is dan natuurlijke taalverwerking -- wat onze hersenen doen om tijdens een gesprek betekenis uit woorden en zinnen te halen.
aanvankelijk, wetenschappers dachten dat het zo simpel zou zijn als het inpluggen van de grammaticaregels in de geheugenbanken van een machine. Maar het is onmogelijk gebleken om een grammaticale inleiding voor een bepaalde taal hard te coderen. Zelfs het verstrekken van regels rond de betekenis van individuele woorden heeft het leren van talen tot een ontmoedigende taak gemaakt. Voorbeeld nodig? Denk aan "nieuw" en "weten" of "bank" (een plaats om geld te plaatsen) en "bank" (de kant van een rivier). Blijkt dat mensen deze taalkundige eigenaardigheden begrijpen door te vertrouwen op mentale vermogens die gedurende vele, vele jaren van evolutie, en wetenschappers zijn er niet in geslaagd deze capaciteiten op te splitsen in discrete, herkenbare regels.
Als resultaat, veel robots baseren hun taalverwerking tegenwoordig op statistieken. Wetenschappers voeden ze enorme verzamelingen tekst, bekend als a corpus , en laat hun computers de langere tekst in stukken opsplitsen om erachter te komen welke woorden vaak bij elkaar komen en in welke volgorde. Hierdoor kan de robot een taal "leren" op basis van statistische analyse. Bijvoorbeeld, naar een robot, het woord "vleermuis" vergezeld van het woord "vlieg" of "vleugel" verwijst naar het vliegende zoogdier, terwijl "bat" gevolgd door "ball" of "handschoen" verwijst naar de teamsport.
7:Nieuwe vaardigheden verwerven
 Een robot toont zijn schrijfvaardigheid tijdens een wedstrijd van intelligente robots gemaakt door studenten aan de Chinese Anhui University of Science and Technology op 16 november, 2012. © Chen Bin/Xinhua Press/Corbis
Een robot toont zijn schrijfvaardigheid tijdens een wedstrijd van intelligente robots gemaakt door studenten aan de Chinese Anhui University of Science and Technology op 16 november, 2012. © Chen Bin/Xinhua Press/Corbis Laten we zeggen dat iemand die nog nooit golf heeft gespeeld, wil leren hoe hij een club moet zwaaien. Hij zou er een boek over kunnen lezen en het dan proberen, of hij kan kijken naar een geoefende golfer die de juiste bewegingen maakt, een snellere en gemakkelijkere manier om het nieuwe gedrag aan te leren.
Robotici staan voor een soortgelijk dilemma wanneer ze een autonome machine proberen te bouwen die nieuwe vaardigheden kan leren. een benadering, zoals bij het golfvoorbeeld, is om een activiteit op te splitsen in precieze stappen en de informatie vervolgens in de hersenen van de robot te programmeren. Dit veronderstelt dat elk aspect van de activiteit kan worden ontleed, beschreven en gecodeerd, die, zoals het blijkt, is niet altijd gemakkelijk om te doen. Er zijn bepaalde aspecten van het slingeren van een golfclub, bijvoorbeeld, dat aantoonbaar niet kan worden beschreven, zoals het samenspel van pols en elleboog. Deze subtiele details kunnen veel gemakkelijker worden gecommuniceerd door te laten zien in plaats van te vertellen.
In recente jaren, onderzoekers hebben enig succes gehad door robots te leren een menselijke operator na te bootsen. Ze noemen dit imitatie leren of leren van demonstratie ( LfD ), en ze slagen erin door hun machines te bewapenen met reeksen groothoek- en zoomcamera's. Met deze apparatuur kan de robot een menselijke leraar "zien" die een specifiek proces of activiteit uitvoert. Leeralgoritmen verwerken deze gegevens vervolgens om een wiskundige functiekaart te produceren die visuele invoer koppelt aan gewenste acties. Natuurlijk, robots in LfD-scenario's moeten in staat zijn om bepaalde aspecten van het gedrag van hun leraar te negeren - zoals krabben aan jeuk - en correspondentieproblemen oplossen, die verwijst naar manieren waarop de anatomie van een robot verschilt van die van een mens.
6:Oefen misleiding
Eekhoorns worden beoefend in de kunst van misleiding, dus hebben onderzoekers zich tot deze sluwe knaagdieren gewend voor een paar ideeën over het aanleren van bedrieglijk gedrag van robots. John Foxx/Stockbyte/Thinkstock De fijne kunst van misleiding is geëvolueerd om dieren te helpen een voorsprong te nemen op hun concurrenten en te voorkomen dat ze door roofdieren worden opgegeten. Met oefenen, de vaardigheid kan een zeer effectief overlevingsmechanisme worden.
Voor robots, het was een uitdaging om te leren hoe je een persoon of een andere robot kunt misleiden (en dat vind je misschien prima). Misleiding vereist verbeeldingskracht -- het vermogen om ideeën of afbeeldingen te vormen van externe objecten die niet aanwezig zijn voor de zintuigen -- iets wat machines doorgaans missen (zie het volgende item op onze lijst). Ze zijn geweldig in het verwerken van directe input van sensoren, camera's en scanners, maar niet zo goed in het vormen van concepten die verder gaan dan al die zintuiglijke gegevens.
Toekomstige robots zijn misschien beter thuis in bedrog. Georgia Tech-onderzoekers hebben enkele bedrieglijke vaardigheden van eekhoorns kunnen overbrengen op robots in hun laboratorium. Eerst, ze bestudeerden de pluizige knaagdieren, die hun voorraad begraven voedsel beschermen door concurrenten naar oud, ongebruikte caches. Vervolgens codeerden ze dat gedrag in eenvoudige regels en laadden ze in de hersenen van hun robots. De machines konden de algoritmen gebruiken om te bepalen of misleiding in een bepaalde situatie nuttig zou kunnen zijn. Als, ze waren vervolgens in staat om een valse communicatie te geven die een begeleidende bot wegleidde van hun schuilplaats.
5:Anticipeer op menselijke acties
 Als mensen veel tijd met robots gaan doorbrengen, zoals deze mensachtige genaamd ROBOY, de machines zullen een beetje beter moeten worden in het voorspellen van wat schijnbaar onvoorspelbare mensen hierna zullen doen. © Erik Tham/Corbis
Als mensen veel tijd met robots gaan doorbrengen, zoals deze mensachtige genaamd ROBOY, de machines zullen een beetje beter moeten worden in het voorspellen van wat schijnbaar onvoorspelbare mensen hierna zullen doen. © Erik Tham/Corbis Op "De Jetsons, " Rosie de robotmeid kon gesprekken voeren, maaltijden koken, het huis schoonmaken en tegemoet komen aan de behoeften en wensen van George, Jane, Judy en Elroy. Om de geavanceerde ontwikkeling van Rosie te begrijpen, overweeg deze scène uit de eerste aflevering van seizoen één:Mr. Spacely, Georges baas, komt naar het Jetson-huis voor het avondeten. Na het eten, Mr. Spacely haalt een sigaar tevoorschijn en stopt hem in zijn mond, wat Rosie ertoe aanzet om met een aansteker naar hem toe te rennen. Deze eenvoudige actie vertegenwoordigt een complex menselijk gedrag -- het vermogen om te anticiperen op wat er daarna komt op basis van wat er net is gebeurd.
Als bedrog, anticiperen op menselijk handelen vereist een robot om zich een toekomstige staat voor te stellen. Het moet kunnen zeggen, "Als ik een mens zie die x doet, dan kan ik verwachten, op basis van eerdere ervaringen, dat ze het waarschijnlijk zal opvolgen met y." Dit was een serieuze uitdaging in robotica, maar de mens boekt vooruitgang. Aan de Cornell-universiteit, een team heeft gewerkt aan de ontwikkeling van een autonome robot die kan reageren op basis van hoe een metgezel omgaat met objecten in de omgeving. Om dit te bereiken, de robot gebruikt een paar 3D-camera's om een beeld van de omgeving te krijgen. Volgende, een algoritme identificeert de belangrijkste objecten in de kamer en isoleert ze van de rommel op de achtergrond. Vervolgens, met behulp van een schat aan informatie verzameld uit eerdere trainingssessies, de robot genereert een reeks waarschijnlijke anticipaties op basis van de beweging van de persoon en de objecten die ze aanraakt. De robot kan zo goed mogelijk inschatten wat er gaat gebeuren en handelt daarnaar.
De Cornell-robots raden soms nog steeds verkeerd, maar ze maken gestaag vorderingen, vooral naarmate de cameratechnologie verbetert.
4:Activiteiten coördineren met een andere robot
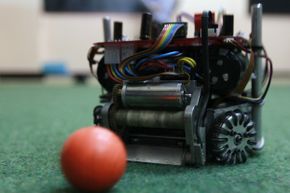 Close-up van een lid van het robotvoetbalteam van Columbia. Een van de RoboCup Soccer-competities bevat meerdere volledig autonome robots die samenwerken om de sport te spelen. Een andere competitie bevat humanoïde robots! © John Vizcaino/Reuters/Corbis
Close-up van een lid van het robotvoetbalteam van Columbia. Een van de RoboCup Soccer-competities bevat meerdere volledig autonome robots die samenwerken om de sport te spelen. Een andere competitie bevat humanoïde robots! © John Vizcaino/Reuters/Corbis Het bouwen van een enkele, grootschalige machine -- een Android, als u wilt -- vereist aanzienlijke tijdsinvesteringen, energie en geld. Een andere benadering is het inzetten van een leger van kleinere, eenvoudigere robots die vervolgens samenwerken om complexere taken uit te voeren.
Dit brengt een andere reeks uitdagingen met zich mee. Een robot die in een team werkt, moet zich nauwkeurig kunnen positioneren ten opzichte van teamgenoten en moet effectief kunnen communiceren - met andere machines en met menselijke operators. Om deze problemen op te lossen, wetenschappers hebben zich tot de wereld van insecten gewend, die complex zwermgedrag vertonen om voedsel te vinden en taken uit te voeren die de hele kolonie ten goede komen. Bijvoorbeeld, door mieren te bestuderen, onderzoekers weten dat individuen feromonen gebruiken om met elkaar te communiceren.
Robots kunnen dezelfde "feromoonlogica, " hoewel ze op licht vertrouwen, geen chemicaliën, communiceren. Het werkt als volgt:een groep kleine bots is verspreid in een beperkt gebied. Aanvankelijk, ze verkennen het gebied willekeurig totdat een persoon een lichtspoor tegenkomt dat door een andere bot is achtergelaten. Hij weet het spoor te volgen en doet dat ook, terwijl het zijn eigen lichtspoor achterlaat. Naarmate het pad wordt versterkt, steeds meer bots vinden het en sluiten zich aan bij de wagentrein. Sommige onderzoekers hebben ook succes gevonden met hoorbare piepjes. Geluid kan worden gebruikt om ervoor te zorgen dat individuele bots niet te ver afdwalen of om teamgenoten naar een interessant item te lokken.
3:Kopieën van zichzelf maken
 Een hydra pronkt met zijn zelfreplicerende vermogen, een die sommige robotocisten niet erg zouden vinden om in hun machines op te nemen. luismmolina/iStock/Thinkstock
Een hydra pronkt met zijn zelfreplicerende vermogen, een die sommige robotocisten niet erg zouden vinden om in hun machines op te nemen. luismmolina/iStock/Thinkstock God vertelde Adam en Eva, "Wees vruchtbaar en vermenigvuldig, en de aarde aanvullen." Een robot die hetzelfde commando kreeg, zou zich ofwel verward of gefrustreerd voelen. Waarom? Omdat zelfreplicatie ongrijpbaar is gebleken. Het is één ding om een robot te bouwen -- het is een heel ander ding om een robot te bouwen die zichzelf kopiëren of verloren of beschadigde onderdelen regenereren.
interessant, robots zien mensen misschien niet als reproductieve rolmodellen. Misschien is het je opgevallen dat we niet echt in twee identieke stukken verdelen. eenvoudige dieren, echter, doe dit de hele tijd. Verwanten van kwallen, bekend als hydra, oefenen een vorm van ongeslachtelijke voortplanting uit die bekend staat als: ontluikend :Een kleine zakballon naar buiten uit het lichaam van de ouder en breekt dan af om een nieuwe te worden, genetisch identiek individu.
Wetenschappers werken aan robots die deze basiskloonprocedure kunnen uitvoeren. Veel van deze robots zijn opgebouwd uit herhalende elementen, meestal kubussen, die identieke machines en het programma voor zelfreplicatie bevatten. De kubussen hebben magneten op hun oppervlak, zodat ze zich kunnen hechten aan en losmaken van andere kubussen in de buurt. En elke kubus is verdeeld in twee stukken langs een diagonaal, zodat elke helft onafhankelijk kan draaien. Een complete robot, dan, bestaat uit verschillende kubussen die in een specifieke configuratie zijn gerangschikt. Zolang er een voorraad kubussen beschikbaar is, een enkele robot kan bukken, verwijder kubussen uit zijn "lichaam" om een nieuwe machine te zaaien en pak vervolgens bouwstenen uit de voorraad totdat twee volledig gevormde robots naast elkaar staan.
2:Handelen op basis van ethische principes
 Als je dodelijke autonome robots bouwt waarvoor geen menselijke operators nodig zijn, hoe zou je ethiek precies programmeren? © Fang Zhe/Xinhua Press/Corbis
Als je dodelijke autonome robots bouwt waarvoor geen menselijke operators nodig zijn, hoe zou je ethiek precies programmeren? © Fang Zhe/Xinhua Press/Corbis Omdat we de hele dag met mensen omgaan, we nemen honderden beslissingen. In elk een, we wegen onze keuzes af tegen wat goed en fout is, wat is eerlijk en oneerlijk. Als we willen dat robots zich net zo gedragen als wij, ze hebben begrip van ethiek nodig.
zoals taal, het coderen van ethisch gedrag is een enorme uitdaging, vooral omdat er geen algemene set van universeel aanvaarde ethische principes bestaat. Verschillende culturen hebben verschillende gedragsregels en verschillende wettenstelsels. Ook binnen culturen, regionale verschillen kunnen van invloed zijn op hoe mensen hun acties en de acties van de mensen om hen heen evalueren en meten. Proberen om een wereldwijd relevante ethische handleiding te schrijven die robots als leermiddel zouden kunnen gebruiken, zou vrijwel onmogelijk zijn.
Dat gezegd hebbende, onderzoekers hebben onlangs ethische robots kunnen bouwen door de omvang van het probleem te beperken. Bijvoorbeeld, een machine beperkt tot een specifieke omgeving -- een keuken, zeggen, of de kamer van een patiënt in een instelling voor begeleid wonen -- zou veel minder regels hebben om te leren en zou redelijk succes hebben bij het nemen van ethisch verantwoorde beslissingen. Om dit te bereiken, robotingenieurs voeren informatie in over keuzes die in geselecteerde gevallen als ethisch worden beschouwd in een algoritme voor machine learning. De keuzes zijn gebaseerd op drie glijdende schaalcriteria:hoeveel goeds zou een actie opleveren, hoeveel schade het zou voorkomen en een mate van rechtvaardigheid. Het algoritme voert vervolgens een ethisch principe uit dat door de robot kan worden gebruikt bij het nemen van beslissingen. Door gebruik te maken van dit type kunstmatige intelligentie, jouw huishoudrobot van de toekomst zal kunnen bepalen wie in het gezin wie de afwas moet doen en wie de afstandsbediening van de tv voor de nacht mag bedienen.
1:Voel emoties
Samen met zijn emotionele vermogens, Nao weet duidelijk hoe hij moet chillen. © Gerd Roth/dpa/Corbis "De beste en mooiste dingen ter wereld kunnen niet worden gezien of zelfs maar worden aangeraakt. Ze moeten met het hart worden gevoeld." Als deze observatie van Helen Keller waar is, dan zouden robots voorbestemd zijn om het beste en mooiste te missen. Ten slotte, ze zijn geweldig in het voelen van de wereld om hen heen, maar ze kunnen die zintuiglijke gegevens niet omzetten in specifieke emoties. Ze kunnen de glimlach van een geliefde niet zien en vreugde voelen, of neem de grimas van een schimmige vreemdeling op en beef van angst.
Dit, meer dan wat dan ook op onze lijst, zou het ding kunnen zijn dat de mens van de machine scheidt. Hoe kun je een robot leren verliefd te worden? Hoe kun je frustratie programmeren, walging, verbazing of medelijden? Is het zelfs het proberen waard?
Sommige wetenschappers denken van wel. Ze geloven dat toekomstige robots zowel cognitieve emotiesystemen, en dat, als resultaat, ze zullen beter kunnen functioneren, sneller leren en effectiever omgaan met mensen. Geloof het of niet, Er bestaan al prototypes die een beperkt scala aan menselijke emoties uitdrukken. Nao, een robot ontwikkeld door een Europees onderzoeksteam, heeft de affectieve kwaliteiten van een 1-jarig kind. Het kan blijdschap tonen, woede, angst en trots, allemaal door houdingen te combineren met gebaren. Deze weergave-acties, afgeleid van studies van chimpansees en menselijke zuigelingen, zijn geprogrammeerd in Nao, maar de robot beslist welke emotie hij toont op basis van zijn interactie met mensen en objecten in de buurt. In de komende jaren, robots zoals Nao zullen waarschijnlijk in verschillende omgevingen werken - ziekenhuizen, huizen en scholen -- waarin ze een helpende hand en een luisterend oor kunnen bieden.
Veel meer informatie
Notitie van de auteur:10 moeilijkste dingen om robots te leren
De robot uit "Lost in Space" (de tv-serie uit de jaren 60, niet de vreselijke film uit 1998) dwaalde door mijn verbeelding toen ik dit artikel schreef. Het was moeilijk om te schrijven over mensen die interactie hebben met machines en de iconische waarschuwing van The Robot niet te horen:"Gevaar, Wil Robinson, gevaar!" - echode in mijn gedachten.
gerelateerde artikelen
- 10 kwaadaardige robots die de mensheid willen vernietigen
- 10 robots met vuile banen
- Wat maakt realistische robots zo eng?
- Hoe dirigeert een robot een symfonie?
- Wat is een nano-quadrotor?
bronnen
- Ackerman, Eva. "Cornell leert robots hun fantasie te gebruiken bij het organiseren van je spullen." IEEE-spectrum. 21 juni, 2012. (4 nov., 2013) http://spectrum.ieee.org/automaton/robotics/artificial-intelligence/cornell-teaching-robots-to-use-their-imaginations-when-organizing-your-stuff
- Ackerman, Eva. "Georgia Tech Robots leren bedrieglijk gedrag van eekhoorns." IEEE-spectrum. 3 december 2012. (4 nov., 2013) http://spectrum.ieee.org/automaton/robotics/artificial-intelligence/robots-learn-deceptive-behaviors-from-squirrels
- Ackerman, Eva. "Waarom het belangrijk is om een robot een kopje koffie te leren halen." IEEE-spectrum. 9 mei 2013. (4 nov. 2013) http://spectrum.ieee.org/automaton/robotics/robotics-software/pr2-robot-fetches-cup-of-coffee
- Anderson, Michael en Susan Leigh Anderson. "Robot, Wees goed." Scientific American. Oktober 2010.
- Batalin, Maxim A., Gaurav S. Sukhatme en Myron Hattig. "Mobiele robotnavigatie met behulp van een sensornetwerk." IEEE Internationale conferentie over robotica en automatisering. 26 april 2004. (4 nov., 2013) http://robotics.usc.edu/publications/media/uploads/pubs/367.pdf
- Bonabeau, Eric en Guy Théraulas. "Zwerm Smarts." Wetenschappelijk Amerikaanse rapporten. Speciale editie over robotica. 2008.
- Breeze, Cynthia en Rodney Brooks. "Robotemotie:een functioneel perspectief." Persoonlijke Robotica Groep. 2005. (4 nov., 2013) http://robotic.media.mit.edu/pdfs/other/Breazeal-Brooks-03.pdf
- Karel, Chris. "Robots leren anticiperen op menselijke acties." National Geographic-nieuws. 31 mei 2013. (4 nov. 2013) http://news.nationalgeographic.com/news/2013/05/130531-personal-robot-beer-microsoft-kinect-saxena-science/
- dille, Klei. "De tastzin van robots verbeteren door ze menselijke vingerafdrukken te geven." Populaire wetenschap. 21 september 2011. (4 nov., 2013) http://www.popsci.com/technology/article/2011-09/enhancing-robots-senses-touch-giving-them-human-fingerprints
- Durrant-Waarom, Hugh en Tim Bailey. "Gelijktijdige lokalisatie en mapping (SLAM):deel I De essentiële algoritmen." Tijdschrift voor robotica en automatisering. 2006. (4 nov., 2013) http://www-personal.acfr.usyd.edu.au/tbailey/papers/slamtute1.pdf
- Engels, Pieter, Alexandros Paraschos, Jan Peters en Marc Peter Deisenroth. "Modelgebaseerd imitatieleren door proabilistische trajectaanpassing." Proceedings van de IEEE International Conference on Robotics and Automation. 2013. (4 nov. 2013) http://www.is.tuebingen.mpg.de/fileadmin/user_upload/files/publications/2013/Englert_ICRA_2013.pdf
- Griffioen, Catharina. "MIT-wetenschappers maken M-Cube zelfassemblerende robots:echte wereldtransformatoren." Wetenschapswereldrapport. 4 oktober 2013. (4 nov. 2013) http://www.scienceworldreport.com/articles/9948/20131004/mit-scientists-create-m-cube-self-assembling-robots-real-world.htm
- Halverson, Niks. "Elektronische huid geeft robots een gevoel van aanraking." Ontdekkingsnieuws. 1 juli, 2011. (4 nov., 2013) http://news.discovery.com/tech/robotics/electronic-skin-gives-robots-sense-touch-110701.htm
- Handwerk, Brian. "Robotrevolutie? Wetenschappers leren robots om te leren." National Geographic-nieuws. 18 juli 2013. (4 nov. 2013) http://news.nationalgeographic.com/news/2013/07/130719-robot-lfd-pr2-artificial-intelligence-crowdsourcing-robotics-machine-learning/
- hardst, Larry. "Robots lateraal denken aanleren." MIT-nieuws. 25 februari 2013. (4 nov. 2013) http://web.mit.edu/newsoffice/2013/teaching-robots-lateral-thinking-0225.html
- Hartshorne, Joshua K. "Waar zijn de pratende robots?" Wetenschappelijke Amerikaanse geest. maart/april 2011.
- Hicks, Jennifer. "Robots leren om te bedriegen." Forbes. 30 december 2012. (4 nov., 2013) http://www.forbes.com/sites/jenniferhicks/2012/12/30/teaching-robots-to-deceive/
- Jha, Alok. "Eerste robot die emoties kan ontwikkelen en tonen is onthuld." De Wachter. 8 augustus 2010. (4 november, 2013) http://www.theguardian.com/technology/2010/aug/09/nao-robot-develop-display-emotions
- jones, Jozua, onderzoekwetenschapper, Georgia Instituut van Technologie. E-mailcorrespondentie. 11 november 2013. http://www.cc.gatech.edu/~jj187/
- Korn, Jon. "A 'Bot Bestiary:The Robotic Tradition In Science Fiction." Verlichte Reactor. 13 juli 2012. (4 nov., 2013) http://litreactor.com/columns/a-bot-bestiary-the-robotic-tradition-in-science-fiction
- Afvinken, John. "Onderzoekers brengen tastzin binnen bereik voor robots." De New York Times. 28 april 2013. (4 nov. 2013) http://www.nytimes.com/2013/04/28/science/researchers-put-sense-of-touch-in-reach-for-robots.html?_r=0
- OpenSLAM.org. "Wat is SLAM?" (4 nov. 2013) http://www.openslam.org/
- Ratlif, Nathan D., J. Andrew Bagnell en Siddhartha Srinivasa. "Imitatie leren voor voortbeweging en manipulatie." Robotica Instituut, Carnegie Mellon Universiteit. December 2007. (4 nov. 2013) http://www.ri.cmu.edu/pub_files/pub4/ratliff_nathan_2007_4/ratliff_nathan_2007_4.pdf
- Rieland, Randy. "Robots krijgen de menselijke aanraking." Smithsonian tijdschrift. 10 november 2011. (4 nov., 2013) http://blogs.smithsonianmag.com/ideas/2011/11/robots-get-the-human-touch/
- Schultz, Colin. "Deze nieuwe robot heeft tastzin." Smithsonian tijdschrift. 29 april 2013. (4 nov. 2013) http://blogs.smithsonianmag.com/smartnews/2013/04/this-new-robot-has-a-sense-of-touch/
- Sipper, Moshe en James A. Reggia. "Ga heen en repliceer." Wetenschappelijk Amerikaanse rapporten. Speciale editie over robotica. 2008.
- Steele, Rekening. "Onderzoekers bouwen een robot die zich kan voortplanten." Cornell kroniek. 25 mei 2005. (4 nov., 2013) http://www.news.cornell.edu/stories/2005/05/researchers-build-robot-can-reproduce
- top, Jay. E-mailcorrespondentie. 22 november 2013. http://www.summet.com/
- Tofel, Kevin C. "MIT:We zijn een stap dichter bij zelfreplicerende objecten." Gigaom. 3 april, 2012. (4 nov., 2013) http://gigaom.com/2012/04/03/mit-were-one-step-closer-to-self-replicating-objects/
- Wadsworth, Dirk. "Adaptieve robotica." Idaho Nationaal Laboratorium. (4 nov. 2013)https://inlportal.inl.gov/portal/server.pt/community/robotics_and_intelligence_systems/455

Hoofdlijnen
- Wat is de functie van een eicel?
- Zijn mensen echt afstammelingen van apen?
- De leeftijd van een skelet bepalen
- Wanneer stopt het leven op aarde?
- Meiose: definitie, fasen 1 & 2, verschil met mitose
- Wat doet de DNA-nucleotide volgorde code voor?
- Taxonomie (biologie): definitie, classificatie en voorbeelden
- Het belang van DNA in de menselijke cel
- Hoe communiceren de lever en de nieren en welke hormonen worden gebruikt?






 Hoe mensen mijn robijnen?
Hoe mensen mijn robijnen? - The Inventions of Thomas Edison for Kids
- Hoe de kubuswortel te vinden in Ti-84
- De aanpassingen van Gerbils
- Welke benodigdheden moet je overleven in de ruimte?
- Hoe stabiliseert water de temperatuur?
- Welke intermoleculaire krachten zijn aanwezig in water?
- Wat zijn de verschillen tussen een plant en een dierlijke cel onder een microscoop?
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
