Wetenschap
Vraag en antwoord:Onderzoekers wilden de zeebodem van plastic ontdoen

De in het SeaClear-project onderzochte technologieën worden getest in de haven van Hamburg, onder andere. Krediet:HPA
Elk jaar komt er 86 miljoen ton plastic in de oceanen terecht, met verwoestende gevolgen voor het leven in zee, natuur en, uiteindelijk, voor ons mensen. De enorme drijvende stukken plastic die het wateroppervlak bekleden, sommige zo groot als hele landen, zijn slechts het topje van de ijsberg. Ongeveer 90 procent van dit afval komt op de zeebodem terecht. Het Fraunhofer Centrum voor Maritieme Logistiek en Diensten CML en een internationaal netwerk van partners willen als eerste deze rommel opruimen met een project genaamd SeaClear. Een interview met projectmanagers Johannes Oeffner en Cosmin Delea volgt.
In het SeaClear-project wil je zwerfvuil op de zeebodem verzamelen. Waarom?
Oeffner:Mariene vervuiling is een van de belangrijkste mondiale problemen. Het tast het milieu aan, de economie, veiligheid, gezondheid en cultuur. Kunststoffen worden niet gemakkelijk afgebroken, dus ze zullen waarschijnlijk honderden jaren in de zee blijven. Aangezien voorspellingen verwachten dat de plasticproductie tegen 2050 zal verviervoudigen, we zullen een enorm probleem hebben als we geen actie ondernemen. Volgens het World Economic Forum WEF, de verhouding tussen plastic en vis was in 2014 één op vijf - in 2050 zou er net zoveel plastic afval kunnen zijn als er vis is.
Er zijn veel benaderingen voorgesteld om plastic afval van het oppervlak van zeeën te verwijderen. Wat is jouw concept?
Oeffner:We concentreren ons eerst op het opruimen van de zeebodem, vooral in kustgebieden waar de vervuiling bijzonder zwaar is. In het SeaClear-concept we maken gebruik van verschillende robotvoertuigen die met elkaar verbonden zijn. Een autonoom of op afstand bestuurbaar moederschip (onbemand oppervlaktevoertuig, USV) wordt ondersteund door twee onderwaterrobots (op afstand bediend voertuig, ROV) en een luchtvaartuig of drone (onbemand luchtvaartuig, UAV). We zetten de drone en een robot in om het zwerfvuil op het oppervlak en in de waterkolom in kaart te brengen. De tweede ROV maakt gebruik van deze informatie en gebruikt een speciaal ontworpen grijper en een zuiginrichting om het in kaart gebrachte afval op de zeebodem te verzamelen en in de verzamelbak te gooien.

Dankzij het SeaClear-project, de kust van Dubrovnik moet in de toekomst worden bevrijd van onderwaterafval. Krediet:DUNEA
Welke technologieën zitten hierachter?
Delea:We gebruiken multi-agent controlemethoden voor heterogene robots om alle autonome voertuigen synchroon te besturen. Dit betekent dat de verandering van positie van de ene robot door de andere robots wordt bevestigd. Elke robot heeft de ingebouwde mogelijkheid om zich zonder menselijke tussenkomst aan deze veranderingen aan te passen. Hoewel we een opdracht geven, het is specifiek gericht op één robot, terwijl de andere robots de verandering van houding zullen opmerken en indien nodig zullen reageren. We gebruiken diepgaande algoritmen om afval van mariene fauna en flora te detecteren en te onderscheiden. specifiek, we combineren verschillende sensorische systemen zoals conventionele en multispectrale camera's of akoestische sensoren om relevante gegevens over het water te verkrijgen en, na een aantal trainingen, om zeeafval online op te sporen en te classificeren.
Hoe train je de autonome robots?
Delea:Detectie en classificatie vereisen een intensieve training. De eerste stappen voor beide zijn het gebruik van informatie uit openbaar beschikbare bronnen, zoals grote online databases met beeldmateriaal van het leven in zee. Daarna trainen we verder met dummy targets. Voordat de laatste demonstraties plaatsvinden, voorlopige proeven worden gehouden om hun prestaties te beoordelen.
Kustgebieden zijn heel verschillend. Waar vinden deze proeven plaats?
Oeffner:We testen de technologieën momenteel in twee verschillende scenario's op twee locaties op een diepte van 20 tot 30 meter. We willen het proces demonstreren terwijl de havenactiviteiten aan de gang zijn met de bestaande infrastructuur en vaste procedures in de haven van Hamburg. Daarom richt dit scenario zich op het industriegebied van de haven. Het kustscenario in Dubrovnik, Kroatië, richt zich op de toeristische sector en is specifiek gericht op het zuiveren van het water op toeristische hotspots. In het voorjaar hebben op beide locaties de eerste proeven plaatsgevonden. In de nazomer staan verdere tests gepland voor Dubrovnik, nadat de proeven vanwege corona waren opgeschort.
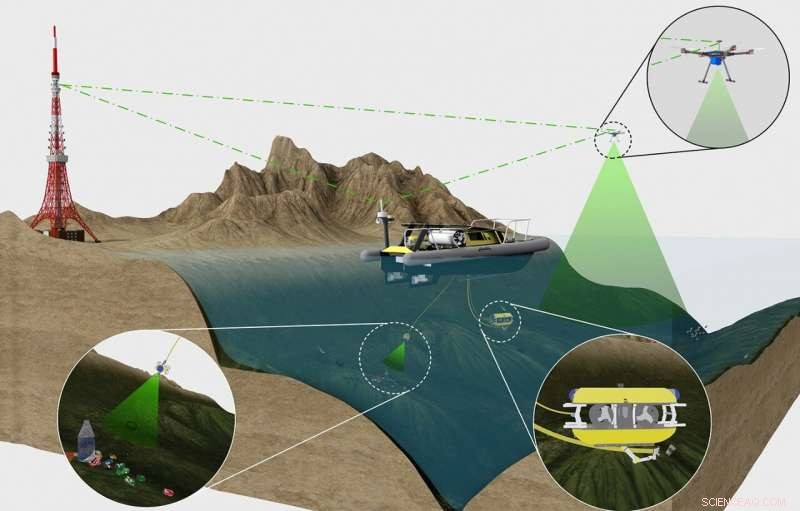
In het SeaClear-systeem zijn verschillende robotvoertuigen met elkaar verbonden. Een autonoom of op afstand bestuurbaar moederschip (UPS) aan de oppervlakte wordt ondersteund door twee onderwaterrobots (ROV) en een flight drone (UAV). Krediet:TUM
Wat zijn de grootste uitdagingen in dit project?
Delea:De uitdagingen op de twee testlocaties zijn verschillend:de wateren bij Hamburg zijn erg moeilijk te analyseren vanwege hun troebelheid en het lage zicht. Bovendien, op dit moment zijn er geen duidelijke statistieken over het type en de hoeveelheid onderwaterafval in het havengebied. Hier willen we de robuustheid en individuele kenmerken van het SeaClear-systeem verder ontwikkelen en marktklaar maken. Hiertoe, we hebben stakeholders uit de haven van Hamburg aan boord gehaald om SeaClear als toekomstige havendienst te bekijken. De grote moeilijkheid in Dubrovnik is dat de toegang van het publiek niet kan worden beperkt. Anderzijds, hierdoor zullen een aantal extra veiligheidsmaatregelen nodig zijn, die moeten worden genomen wanneer het systeem ter plaatse wordt getest. Maar het zicht in deze wateren is bijna ideaal, dus het belangrijkste doel is om het algehele systeem te valideren en de volledige set functies te tonen.
Hoe pakt u deze problemen aan?
Deléa:In Hamburg, bij het in kaart brengen van het zwerfvuil op zee proberen we gegevens van verschillende sensoren samen te brengen om te beoordelen wat voor soort onderzees zwerfvuil zich in deze wateren bevindt. We gebruiken voornamelijk akoestische sensoren vanwege het beperkte zicht. in Dubrovnik, we gaan extra veiligheidsmechanismen installeren op de vliegende drone, met wat hulp van de sensoren op het moederschip. Het doel hier is om veiligheidsproblemen te minimaliseren en aanrijdingen te voorkomen.
En hoe ga je ervoor zorgen dat kwetsbare ecosystemen zoals koraalriffen niet worden beschadigd?
Delea:Dit probleem is niet aanwezig in Hamburg, terwijl de Kroatische testlocatie ook weinig koraalriffen heeft. Maar wanneer het laatste SeaClear-systeem wordt ingezet, het zal optische sensoren en AI gebruiken om de koraalriffen te onderscheiden, vermijd moeilijke/gevaarlijke procedures om alleen het afval te verzamelen.
Welk deel van het project is de verantwoordelijkheid van Fraunhofer CML en wie zijn de andere partners in deze onderneming?
Oeffner:CML is de technisch coördinator van het project en is verantwoordelijk voor de integratie van het totale systeem en voor het ontwerpen en ontwikkelen van de onderwatermand om het ingezamelde afval vast te houden. Bovendien, we ontwikkelen een virtueel controlecentrum dat commando's naar de robots stuurt en hun gegevens verspreidt. Het project omvat ook het opzetten van het communicatienetwerk en de serverinfrastructuur die nodig zijn om SeaClear-diensten via webinterfaces aan de verschillende klanten te leveren. Het consortium bestaat uit de Technische Universiteiten van München, Delft, Dubrovnik en Cluj-Napoca evenals SubSea Tech Marseille, de Hamburg Port Authority en het DUNEA Regional Development Agency Dubrovnik. Het doel is dat de laatste twee organisaties het ontwikkelde systeem ook gaan gebruiken en gebruiken nadat het project is afgerond.
 Seismische golven helpen wetenschappers om chemische veranderingen onder een stroomgebied te zien
Seismische golven helpen wetenschappers om chemische veranderingen onder een stroomgebied te zien- Klimaatverandering in bedwang houden:studie vindt een sterke reden voor de menselijke factor
- NASA berekent tropische storm Harveys overstromende regenval
- Steden en landen streven ernaar om binnen tien jaar plastic afval te verminderen
- NASA vangt orkaan Dora op maximale sterkte, voordat de verzwakking begon
Hoofdlijnen
- Science Fair Ideas With the Topic Dance
- Er is een genetische reden waarom Labrador Retrievers geobsedeerd zijn door voedsel
- Relatie tussen DNA-basen Genen, eiwitten en eigenschappen
- Wetenschappers hebben ontdekt welke genen onkambaar haarsyndroom veroorzaken
- Genotypes bepalen
- Hoe orbitale diagrammen te doen
- Kan eten mensen gelukkig maken?
- Dennen kappen:eerder vroeger dan later doen is beter voor fynbos
- Wat gebeurt er met planten en dierlijke cellen bij plaatsing in hypertonische, hypotone en isotone omgevingen?
- De Arctische koolstofcyclus versnelt, studieverslagen

- Hawaiis vulkaan Kilauea barst uit

- Geavanceerde recyclingstrategieën nodig om het probleem van plasticvervuiling op te ruimen, zegt expert

- Gebouwd zand zuigt verontreinigende stoffen in het regenwater op

- Groenlandse ijsverliezen stijgen sneller dan verwacht


 Snel roterende sterren in het centrum van de Melkweg zouden vanuit de buitenwijken van de melkweg zijn gemigreerd
Snel roterende sterren in het centrum van de Melkweg zouden vanuit de buitenwijken van de melkweg zijn gemigreerd- Vogels die over de oceaan vliegen
- Start de AC, vervuiling in de auto verminderen
- Voeg ten minste 57 toe aan het aantal vuurwapengerelateerde sterfgevallen dat verband houdt met de massale schietpartij in Sandy Hook
- Sneeuw heeft mogelijk een aantal bloemen vertraagd voor de eerste dag van de lente
- Ghana behaalt wereldrecord in medische droneservice
- Hoe wordt pollen geproduceerd?
- Verbetering van de bodemgezondheid begint bij samenwerking tussen boeren en onderzoekers
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
