Wetenschap
Een robot die circuits tekent met geleidende inkt om te overleven
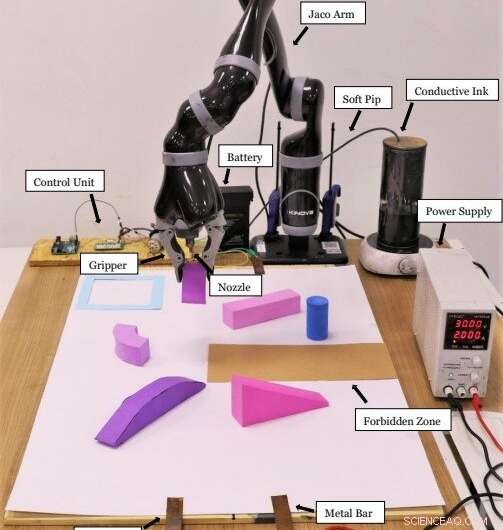
Experimentele opstelling van de circuittekenrobot. De Kinova 6DOF Jaco Arm voert eerst pick-and-place-acties uit in de door het netwerk voorgestelde pose. Vervolgens beweegt de arm naar een van de metalen staven op 5 cm boven het karton. De ROS-controller verzendt continu de waypoints van het circuitpad berekend op basis van het 3D-padplanningsalgoritme. Een Arduino ontvangt vervolgens de status van de arm via ROS en stelt de aan/uit van de peristaltische pomp in om de inktstroom te regelen. De verbinding begint geleidend te worden nadat de inkt is opgedroogd (30 minuten). Credit:Xianglong Tan, Zhikang Liu, Chen Yu, Andre Rosendo, De omgeving herschikken om energie te maximaliseren met een robotcircuittekening. arXiv:2111.08147v1 [cs.RO], https://arxiv.org/abs/2111.08147
Recente technologische ontwikkelingen hebben de weg vrijgemaakt voor de creatie van steeds geavanceerdere robotsystemen die zijn ontworpen om autonoom missies te voltooien in verschillende bekende en onbekende omgevingen. Robots die bedoeld zijn om in onzekere of afgelegen omgevingen te werken, kunnen enorm profiteren van de mogelijkheid om actief elektrische stroom uit hun omgeving te verkrijgen.
Onderzoekers van het Worcester Polytechnic Institute, Imperial College London en University of Illinois Urbana Champaign hebben onlangs een nieuw robotsysteem ontwikkeld dat de omgeving visueel kan herschikken om de maximale hoeveelheid energie van een bepaalde stroombron te ontvangen. Deze robot, gepresenteerd in een paper dat vooraf is gepubliceerd op arXiv en zal worden gepresenteerd op de IEEE International Conference on Robotics and Biomimetics, werkt door elektrische circuits te tekenen met behulp van geleidende inkt.
"Onze PLOS ONE het werk begon als een nogal filosofisch gedachte-experiment," vertelde Andre Rosendo, de professor die het onderzoek uitvoerde, aan TechXplore. "Nietzsche beweert dat het oerinstinct van de mens macht is, en overleven is slechts een voorwaarde sine qua non we konden dat niet bereiken einddoel. Op basis van dit idee begonnen we experimentele omgevingen te bedenken waar onze robot niet alleen kon handelen om te overleven, maar ook om te gedijen."
In hun eerste studie over dit onderwerp probeerden Andre Rosendo, Xianglong Tan en Weijie Lyu een systeem te bedenken dat zichzelf van stroom kon voorzien door alleen maar elektrische circuits te schilderen. In hun nieuwe werk combineerden ze dit printsysteem met een robotgrijper, waardoor een robot ontstond die een repertoire van acties kan uitvoeren die gericht zijn op het verkrijgen van meer vermogen (d.w.z. hogere spanningen) uit zijn omgeving en zo te overleven in ongunstige omgevingen.
Het team testte hun robot in simulaties van verschillende real-world scenario's, inclusief taken waarbij het fysieke obstakels of regio's moest vermijden die de getekende circuits zouden beëindigen. Vervolgens hebben ze de robot ook in een echte wereld getest om de mogelijkheden ervan verder te evalueren.
"Onze robot begint elk experiment met een batterij, en zijn energiebron neemt af naarmate hij beweegt (en we 'lekken' hem ook om natuurlijke energieverliezen als gevolg van homeostase na te bootsen), " legde de student Xianglong Tan uit. "De robot doorloopt een reeks virtuele trainingsafleveringen, met een rode terminal (VCC) die moet worden verbonden met een andere rode terminal in de buurt van zijn lichaam, en een zwarte terminal (aarde) die moet overeenkomen met de zwarte zodat de huidige kan naar zijn batterij stromen."
Om te voorkomen dat hun robot simpelweg in een simpele rechte lijn beweegt, hebben Rosendo en zijn collega's obstakels in de omgeving toegevoegd, zowel in gesimuleerde als in praktijkproeven. Sommige van deze obstakels, zoals schuimblokjes, konden gemakkelijk door de robots worden verwijderd, terwijl andere werden aangesloten op een aardingsplaat die de elektrische stroom "wegzuigde" wanneer een circuit het raakte.
Het team ontdekte dat hun robot snel en effectief leerde om deze obstakels te overwinnen om te overleven en de ontvangen energie te maximaliseren. Dit betekende het herschikken van obstakels of het overbruggen van gebieden in de omgeving die het niet kon binnenhalen.
"Ik denk dat we stappen ondernemen in de richting van adaptief gedrag voor robots", zei Rosendo. "Mensen zijn in staat om zich aan te passen, hun gedrag aan te passen aan wat nodig is in nieuwe situaties, en geleidelijk te verbeteren naarmate hun kennis volwassener wordt. We zouden het kunnen hebben over sport, taken of zelfs ruimtemissies:voordat we op de hoogte zijn van ons spel, besteden we onze Aanvankelijke inspanningen om de nieuwe regels te begrijpen om later te verbeteren en verder te gaan. Robots hebben tegenwoordig moeite om storingen te overwinnen en leren zich aan te passen om zichzelf functioneel te houden is een vaardigheid die ze van ons zouden moeten nabootsen."
De aanpassingsrobot van Rosendo en zijn collega's zou tal van voordelen kunnen hebben, omdat hij autonoom de energie in zijn omgeving kan maximaliseren en zichzelf continu functioneel kan houden door nieuwe elektrische circuits te creëren. In de toekomst zou dit recente werk een inspiratie kunnen zijn voor de ontwikkeling van andere robotsystemen die kunnen overleven en gedijen in complexe omgevingen zonder de noodzaak van nieuwe circuits of menselijk toezicht.
"We denken nu na over volgende stappen om voort te bouwen op ons werk en dit experiment interessant te houden, zoals het compliceren van de taak en het bedenken van een 'batterijwissel'-systeem om het experiment realistischer te maken," voegde Tan eraan toe. + Verder verkennen
Neuromorfe chip vermindert de stroomvereisten voor rollende robot drastisch
© 2022 Science X Network
 Wat is er te ontdekken op het snijvlak van natuurkunde en scheikunde?
Wat is er te ontdekken op het snijvlak van natuurkunde en scheikunde?- Vier kenmerken van een primaire standaardubstantie
- Onderzoekers pleiten voor beter gebruik van chemische hulpmiddelen om biomedisch onderzoek te verbeteren
- Remt of bevordert zink de groei van nierstenen? We zullen, beide
- Welke chemicaliën worden gebruikt in instant-ijspakketten?
Hoofdlijnen
- Wanneer wordt een mutatie in een DNA-molecuul doorgegeven aan nakomelingen?
- Voedingsgewoonte van Maleisische fruitvleermuizen
- Bewaking op afstand helpt bij het vinden van oplossingen voor crapemyrtle bark scale
- Woestijnsprinkhanen - nieuwe risico's in het licht van klimaatverandering
- Vijf redenen om de insecten in je tuin niet te besproeien
- Eetbaar diercelproject met Candy
- Wat zijn de chemische namen van de vier macromoleculen?
- De evolutionaire voordelen van botgewicht onderzoeken
- De rol van microben in de industrie
- Cryptocurrency-boetiek in Moskou in juridisch grijs gebied

- Onderzoekers ontwikkelen zachte kleppen om volledig zachte robots te maken

- Terwijl TikTok-video's populair worden bij tieners, ouders klauteren om bij te blijven

- Inkomsten luchtvaartmaatschappij dalen met 55% in 2020:IATA

- Smartphone-video's produceren zeer realistische 3D-gezichtsreconstructies


 Bahama's beginnen met offshore-olieboringen op slechts 150 mijl van Zuid-Florida
Bahama's beginnen met offshore-olieboringen op slechts 150 mijl van Zuid-Florida- Beheersing van pieken in de vraag naar energie met seizoensgebonden voorspellingen van hittegolven en koude periodes
- Aalto-2 reageert niet meer op commando's
- Studie:Zeer lage effectieve belastingtarieven weerspiegelen vaak geen hoge niveaus van belastingontwijking door bedrijven
- Op de natuur geïnspireerde materialen kunnen worden gebruikt in toepassingen variërend van tunneling tot ruimtevaart
- Ingenieurs ontwikkelen nieuwe methode voor het oplossen van spintextuur van topologische oppervlaktetoestanden met behulp van transportmetingen
- Nederlandse molenaars krijgen frisse wind in de zeilen
- Hoe RNA werd gevormd bij de oorsprong van het leven
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
