Wetenschap
Biologisch geïnspireerde huid verbetert de zintuiglijke vermogens van robots

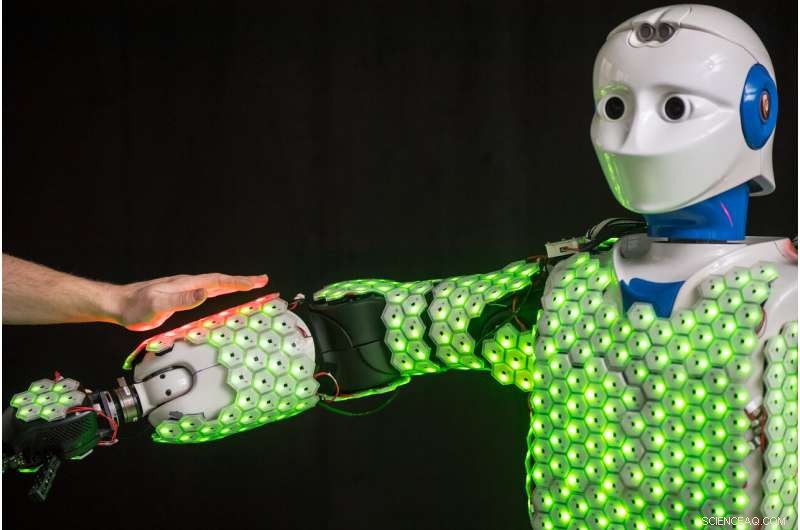
Elke cel van deze kunstmatige huid, ontwikkeld door onderzoekers van de Technische Universiteit van München (TUM), is uitgerust met een microprocessor en sensoren om contact te detecteren, versnelling, nabijheid en temperatuur. Nieuwe besturingsalgoritmen maakten het voor het eerst mogelijk om kunstmatige huid toe te passen op een robot op menselijke maat. Krediet:Astrid Eckert/TUM
Gevoelige synthetische huid stelt robots in staat om hun eigen lichaam en omgeving waar te nemen - een cruciaal vermogen als ze in nauw contact met mensen willen staan. Geïnspireerd door de menselijke huid, een team van de Technische Universiteit van München (TUM) heeft een systeem ontwikkeld dat kunstmatige huid combineert met controle-algoritmen en dit heeft gebruikt om de eerste autonome humanoïde robot met kunstmatige huid voor het hele lichaam te creëren.
De kunstmatige huid die door prof. Gordon Cheng en zijn team is ontwikkeld, bestaat uit zeshoekige cellen ter grootte van een munt van twee euro (d.w.z. ongeveer 2,5 cm in diameter). Elke kamer is uitgerust met een microprocessor en sensoren om contact te detecteren, versnelling, nabijheid en temperatuur. Met een dergelijke kunstmatige huid kunnen robots hun omgeving veel gedetailleerder en gevoeliger waarnemen. Dit helpt hen niet alleen om zich veilig te verplaatsen. Het maakt ze ook veiliger bij het werken in de buurt van mensen en geeft ze de mogelijkheid om te anticiperen en actief ongevallen te vermijden.
De huidcellen zelf zijn ongeveer 10 jaar geleden ontwikkeld door Gordon Cheng, Hoogleraar Cognitieve Systemen aan de TUM. Maar deze uitvinding onthulde pas zijn volledige potentieel wanneer hij werd geïntegreerd in een geavanceerd systeem, zoals beschreven in het laatste nummer van het tijdschrift Procedures van de IEEE .
Meer rekencapaciteit door op gebeurtenissen gebaseerde aanpak
Het grootste obstakel bij het ontwikkelen van een robothuid is altijd de rekencapaciteit geweest. De menselijke huid heeft ongeveer 5 miljoen receptoren. Pogingen om continue verwerking van data van sensoren in kunsthuid door te voeren lopen al snel tegen grenzen aan. Eerdere systemen werden al snel overladen met gegevens van slechts een paar honderd sensoren.
Om dit probleem op te lossen, met behulp van een neuro-engineering benadering, Gordon Cheng en zijn team houden de huidcellen niet continu in de gaten, maar eerder met een op gebeurtenissen gebaseerd systeem. Dit vermindert de verwerkingsinspanning tot 90 procent. De truc:de afzonderlijke cellen geven alleen informatie van hun sensoren door als waarden worden gewijzigd. Dit is vergelijkbaar met de manier waarop het menselijk zenuwstelsel werkt. Bijvoorbeeld, we voelen een hoed als we hem voor het eerst opzetten, maar we wennen snel aan de sensatie. Het is niet nodig om de hoed opnieuw op te merken totdat de wind hem van ons hoofd blaast. Dit stelt ons zenuwstelsel in staat zich te concentreren op nieuwe indrukken die een fysieke reactie vereisen.
Veiligheid, zelfs bij nauw lichamelijk contact
Met de event-based aanpak, Prof. Cheng en zijn team zijn er nu in geslaagd om kunstmatige huid toe te passen op een autonome robot van menselijke grootte die niet afhankelijk is van externe berekeningen. De H-1 robot is uitgerust met 1260 cellen (met meer dan 13000 sensoren) op zijn bovenlichaam, armen, benen en zelfs de zolen van zijn voeten. Dit geeft het een nieuwe "lichamelijke sensatie". Bijvoorbeeld, met zijn gevoelige voeten, H-1 kan reageren op oneffen vloeroppervlakken en zelfs op één been balanceren.
Met zijn speciale huid, de H-1 kan zelfs een persoon veilig een knuffel geven. Dat is minder triviaal dan het klinkt:robots kunnen krachten uitoefenen die een mens ernstig kunnen verwonden. Tijdens een knuffel, twee lichamen raken elkaar op veel verschillende plaatsen. De robot moet deze complexe informatie gebruiken om de juiste bewegingen te berekenen en de juiste contactdrukken uit te oefenen. "Dit is misschien niet zo belangrijk in industriële toepassingen, maar op gebieden als verpleging, robots moeten worden ontworpen voor zeer nauw contact met mensen, " legt Gordon Cheng uit.
Credit:Technische Universiteit München
Veelzijdig en robuust
Het robothuidsysteem van Gordon Cheng is ook zeer robuust en veelzijdig. Omdat de huid uit cellen bestaat, en geen enkel stuk materiaal, het blijft functioneel, zelfs als sommige cellen niet meer werken. "Ons systeem is ontworpen om probleemloos en snel te werken met allerlei soorten robots, ", zegt Gordon Cheng. "Nu werken we aan het creëren van kleinere huidcellen met het potentieel om in grotere aantallen te worden geproduceerd."
 Hoe werkt een atoomabsorptiespectrometer?
Hoe werkt een atoomabsorptiespectrometer? - Onderzoekers ontdekken dat ruimte tussen polymeerketens de energieconversie beïnvloedt
- Nieuwe manieren ontwikkelen om de koperproductie te bevorderen
- Hoe de Mollen van HNO3 te vinden
- Hoe zonlicht elektronen activeert om stikstof te breken en ammoniak te vormen
Hoofdlijnen
- Studie van zeedieren suggereert dat het zenuwstelsel meerdere keren onafhankelijk is geëvolueerd
- Het motoreiwit danst in al onze cellen
- Wat gebeurt er met cellen vanwege een natriumbalans?
- Kleine Braziliaanse kikkers zijn doof voor hun eigen roep
- Wat hebben alle levende organismen gemeen?
- Wat is de relatie tussen een chromosoom en een allel?
- De mens als model voor het begrijpen van biologische fundamenten
- Het unieke pentraxine-koolzuuranhydrase-eiwit reguleert het vermogen van vissen om te zwemmen
- Biologisch onderzoek suggereert dat voeding van vaders vóór seks kan bijdragen aan de gezondheid van de baby
- Nieuw productieproces voor perovskietcellen:snel, goedkope weg naar nieuwe soorten zonnecellen

- Van drones tot telefoons, nieuwe technologie maakt tuinieren makkelijker

- Het oog van de piloot volgen

- Race is begonnen om Europa's oplaadnetwerk voor elektrische auto's op te zetten

- Mede-oprichter van WeWork duwde opzij bij overname SoftBank van $ 5 miljard


 Twitter-aandelen stijgen na berichten over belangen van activistische investeerders
Twitter-aandelen stijgen na berichten over belangen van activistische investeerders- Papieren teststrip kan patiënten met hartfalen helpen hun toestand thuis te controleren
- Spinnenkammen temmen weerbarstige nanovezels
- Hoe atomen in chemische formules te tellen
- Dunste optische golfgeleiderkanalen licht binnen slechts drie lagen atomen
- Silicium bros? Niet dit soort!
- Herwild 25% van het VK voor minder klimaatverandering, meer dieren in het wild en een leven dichter bij de natuur
- De ringen van moleculen vormgeven
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
