Wetenschap
Diepgaande leermethode om vliegachtige robots te ontwerpen
Conceptontwerp van vliegen-robots. Krediet:P. Ramdya, EPFL
"Denk maar eens aan wat een vlieg kan doen, " zegt professor Pavan Ramdya, wiens lab bij EPFL's Brain Mind Institute, met het laboratorium van professor Pascal Fua in EPFL's Institute for Computer Science, leidde de studie. "Een vlieg kan over terrein klimmen dat een robot op wielen niet zou kunnen."
Vliegen zijn niet bepaald vertederend voor mensen. We associëren ze terecht met minder dan smakelijke ervaringen in ons dagelijks leven. Maar er is een onverwachte weg naar verlossing:robots. Het blijkt dat vliegen een aantal functies en mogelijkheden hebben die een nieuw ontwerp voor robotsystemen kunnen informeren.
"In tegenstelling tot de meeste gewervelde dieren, vliegen kunnen bijna elk terrein beklimmen, " zegt Ramdya. "Ze kunnen aan muren en plafonds kleven omdat ze zelfklevende kussentjes en klauwen op de uiteinden van hun poten hebben. Hierdoor kunnen ze in principe overal naartoe. Dat is ook interessant, want als je op elk oppervlak kunt rusten, je kunt je energieverbruik beheersen door te wachten op het juiste moment om te handelen."
Het was deze visie om de principes te extraheren die het vlieggedrag bepalen om het ontwerp van robots te informeren die de ontwikkeling van DeepFly3D aandreven, een motion-capture systeem voor de vlieg Drosophila melanogaster, een modelorganisme dat bijna overal in de biologie wordt gebruikt.
In de experimentele opstelling van Ramdya, een vlieg loopt bovenop een kleine zwevende bal - als een miniatuurloopband - terwijl zeven camera's elke beweging registreren. De bovenzijde van de vlieg is vastgelijmd op een onbeweegbaar podium zodat deze altijd op zijn plaats blijft tijdens het lopen op de bal. Hoe dan ook, de vlieg "gelooft" dat hij vrij kan bewegen.
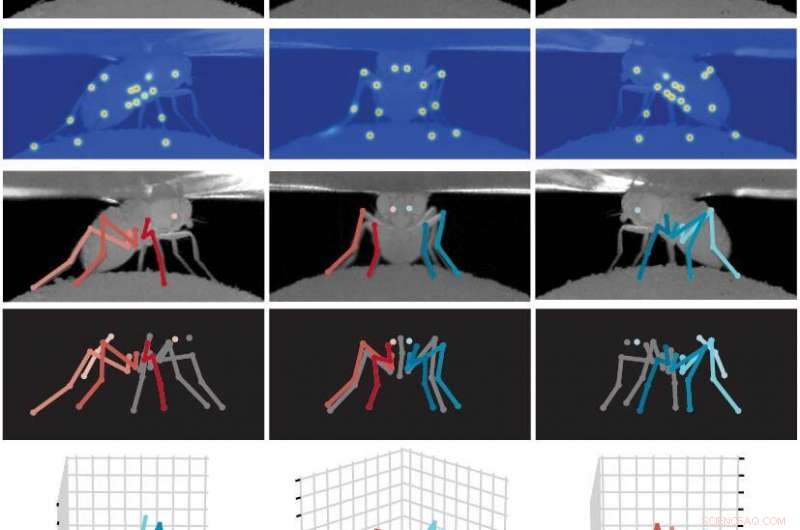
Verschillende poses van de fruitvlieg Drosophila melanogaster worden vastgelegd door meerdere camera's en verwerkt met de DeepFly3D-software. Krediet:P. Ramdya, EPFL
De verzamelde camerabeelden worden vervolgens verwerkt door DeepFly3D, een deep-learning software ontwikkeld door Semih Günel, een doctoraat student die met zowel Ramdya's als Fua's labs werkt. "Dit is een mooi voorbeeld van waar een interdisciplinaire samenwerking noodzakelijk en transformerend was, ", zegt Ramdya. "Door gebruik te maken van computerwetenschap en neurowetenschappen, we hebben een langdurige uitdaging aangepakt."
Het bijzondere aan DeepFly3D is dat het de 3D-houding van de vlieg - of zelfs andere dieren - kan afleiden, wat betekent dat het automatisch gedragsmetingen kan voorspellen en uitvoeren met een ongekende resolutie voor een verscheidenheid aan biologische toepassingen. De software hoeft niet handmatig te worden gekalibreerd en gebruikt camerabeelden om automatisch eventuele fouten in de berekeningen van de vlieghouding te detecteren en te corrigeren. Eindelijk, het gebruikt ook actief leren om zijn eigen prestaties te verbeteren.
DeepFly3D opent een manier om de bewegingen efficiënt en nauwkeurig te modelleren, poseert, en gezamenlijke hoeken van een fruitvlieg in drie dimensies. Dit kan inspireren tot een standaardmanier om 3D-poses ook in andere organismen automatisch te modelleren.
"De vlieg, als modelorganisme, brengt handelbaarheid en complexiteit zeer goed in evenwicht, " zegt Ramdya. "Als we leren hoe het doet wat het doet, we een belangrijke impact kunnen hebben op robotica en medicijnen en, misschien wel het belangrijkste, we kunnen deze inzichten in relatief korte tijd verkrijgen."
 Elektrische veldboost voor waterstroom biedt mogelijk alternatieve waterbehandelingstechnologie
Elektrische veldboost voor waterstroom biedt mogelijk alternatieve waterbehandelingstechnologie- Onderzoek naar oppervlaktespanning zeewater wordt internationale richtlijn
- Bepalen welke samenstelling meer is Acidic
- Welke pH-waarden worden als sterk en zwak beschouwd?
- Nieuwe katalysator voor waterstofproductie is een stap in de richting van schone brandstof
- Frankrijk keert belastingvoordeel op palmolie terug na protest
- Wat op aarde? Fragmenten van oude oceaanbodem, Binnenmantel van de aarde geïdentificeerd in rotsen in het Baltimore-gebied
- Is uw drinkwater veilig?
- Er is een grot in de vorm van een neushoorn in de staat Washington
- Nieuw onderzoek toont aan dat de groei van de Oost-Antarctische ijskap minder was dan eerder werd gesuggereerd
Hoofdlijnen
- Technologie verhoogt melkgift met 9 procent
- Hoe slapende listeria zich in cellen verbergt
- Ontmoet Afrika's vogelmeester van vocale imitatie
- Wat is Aerobic vs. Anaerobic in Biology?
- De machtige Banyan-boom kan eeuwenlang lopen en leven
- Nieuwe studie laat zien hoe mierenkolonies zich anders gedragen in verschillende omgevingen
- Hoe communiceren de lever en de nieren en welke hormonen worden gebruikt?
- Van stroper tot boswachter:de Siberische tijgers van China redden
- Micro-evolutie: definitie, proces, micro versus macro & voorbeelden
- Emirates keert besluit om alle passagiersvluchten op te schorten terug

- Google-ouder Alfabet getroffen door stijgende kosten (update)

- Auto-industrie problemen buffet Ford, Jaguar Landrover

- Fiat Chrysler moet $ 40 miljoen boete betalen voor misleidende verkoopcijfers

- Facebook zegt dat het News Corp-verhalen zal leveren


 'S Werelds meest nauwkeurige klok voor commercieel aftellen
'S Werelds meest nauwkeurige klok voor commercieel aftellen- Turbocharged:hoe Michael in 1 dag 55 procent sterker werd (update)
- Peulvruchten voor een toekomst van duurzame landbouw
- Nieuw inzicht in hoeveel atmosfeer Mars verloor
- Hoe Bunker Busters werken
- Open data toont bliksem, geen brandstichting, was de waarschijnlijke oorzaak van de meeste Victoriaanse bosbranden afgelopen zomer
- Nieuwsmedia moeten desinformatie en nepnieuws bestrijden bij de Amerikaanse presidentsverkiezingen van 2020
- Zien in het donker - hoe plantenwortels water waarnemen door middel van groei
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
