Wetenschap
Een miniatuur rekbare pomp voor de volgende generatie zachte robots

De pomp buigen. Krediet:© Vito Cacucciolo / 2019 EPFL
Zachte robots hebben een duidelijk voordeel ten opzichte van hun starre voorouders:ze kunnen zich aanpassen aan complexe omgevingen, omgaan met kwetsbare objecten en veilig omgaan met mensen. Gemaakt van siliconen, rubber of andere rekbare polymeren, ze zijn ideaal voor gebruik in revalidatie-exoskeletten en robotkleding. Zachte bio-geïnspireerde robots kunnen ooit worden ingezet om afgelegen of gevaarlijke omgevingen te verkennen.
De meeste zachte robots worden aangedreven door starre, luidruchtige pompen die vloeistoffen in de bewegende delen van de machine duwen. Omdat ze door buizen met deze omvangrijke pompen zijn verbonden, deze robots hebben een beperkte autonomie en zijn op zijn best omslachtig om te dragen.
De ketting van zachte robots doorsnijden
Onderzoekers van EPFL's Soft Transducers Laboratory (LMTS) en Laboratory of Intelligent Systems (LIS), in samenwerking met onderzoekers van het Shibaura Institute of Technology in Tokyo, Japan, hebben de eerste volledig zachte pomp ontwikkeld - zelfs de elektroden zijn flexibel. Met een gewicht van slechts één gram, de pomp is volledig stil en verbruikt zeer weinig stroom, die het krijgt van een circuit van 2 cm bij 2 cm dat een oplaadbare batterij bevat. "Als we grotere robots willen aansturen, we koppelen meerdere pompen aan elkaar, " zegt Herbert Shea, de directeur van de LMTS.
Deze innovatieve pomp zou zachte robots van hun ketting kunnen bevrijden. "We beschouwen dit als een paradigmaverschuiving op het gebied van zachte robotica, ", voegt Shea toe. De onderzoekers hebben zojuist een artikel gepubliceerd over hun werk in Natuur .
Zachte pompen kunnen ook worden gebruikt om vloeistoffen te laten circuleren in dunne flexibele buizen die zijn ingebed in slimme kleding, wat leidt tot kledingstukken die verschillende delen van het lichaam actief kunnen koelen of verwarmen. Dat zou voldoen aan de behoeften van chirurgen, atleten en piloten, bijvoorbeeld.
Hoe werkt het?
De zachte en rekbare pomp is gebaseerd op het fysieke mechanisme dat tegenwoordig wordt gebruikt om de koelvloeistof in systemen zoals supercomputers te laten circuleren. De pomp heeft een buisvormig kanaal, 1 mm doorsnee, waarbinnen rijen elektroden zijn gedrukt. De pomp is gevuld met een diëlektrische vloeistof. Wanneer er een spanning wordt aangelegd, elektronen springen van de elektroden naar de vloeistof, waardoor sommige moleculen een elektrische lading krijgen. Deze moleculen worden vervolgens aangetrokken door andere elektroden, meetrekken met de rest van de vloeistof door de buis. "We kunnen de stroom versnellen door het elektrische veld aan te passen, toch blijft het volkomen stil, " zegt Vito Cacucciolo, een postdoc bij het LMTS en de hoofdauteur van de studie.
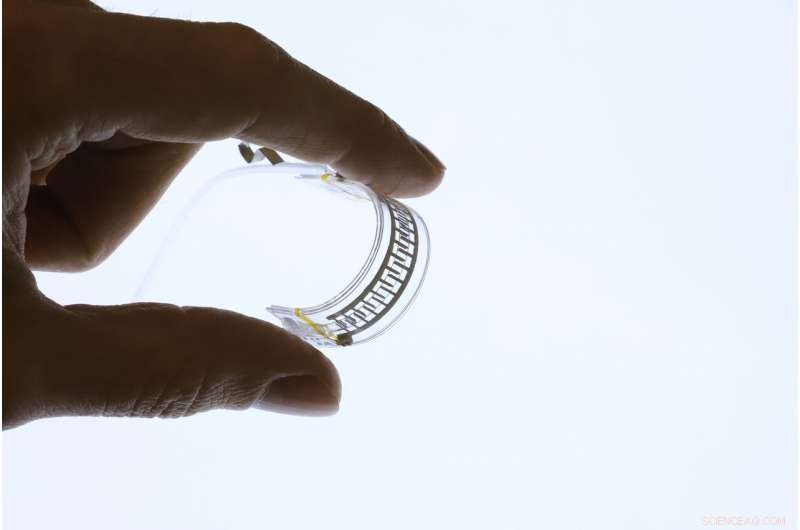
De pomp verbogen. Krediet:© Vito Cacucciolo / EPFL 2019
Kunstspieren ontwikkelen in Japan
De onderzoekers hebben met succes hun pomp geïmplanteerd in een soort robotvinger die veel wordt gebruikt in laboratoria voor zachte robotica. Ze werken nu samen met het laboratorium van Koichi Suzumori in Japan, die door vloeistof aangedreven kunstmatige spieren en flexibele exoskeletten ontwikkelt.
Het EPFL-team heeft ook een stoffen handschoen voorzien van buizen en heeft laten zien dat het mogelijk is om delen van de handschoen naar wens te verwarmen of te koelen met behulp van de pomp. "Het werkt een beetje zoals uw verwarmings- en koelsysteem in huis, ", zegt Cacucciolo. Deze toepassing heeft al bij een aantal bedrijven de interesse gewekt.
 Wat zijn Spectator-ionen?
Wat zijn Spectator-ionen? - Onderzoek naar de relatie tussen het tweelichaam en het collectief
- Twee voordelen van het gebruik van modellen om wetenschappelijke processen te vertegenwoordigen
- Vorming van goudbindingen in realtime gevolgd met behulp van nieuwe moleculaire spectroscopietechniek
- Transparant keramisch pantser biedt superieure ballistische bescherming ten opzichte van traditionele glaslaminaten
- De verschillen tussen fretten en wezels
- Elektriciteitsbron bepaalt voordelen van elektrische voertuigen in China
- Hoe het Iowa Stored Energy Park zal werken
- Toevluchtsoord voor klimaatverandering voor koralen ontdekt (en hoe we het nu kunnen beschermen)
- Californië breidt noodtoestand bij droogte uit naar grote delen van de staat
Hoofdlijnen
- Hightech camera helpt zeugen en biggen te beschermen
- Celademhalingsexperimenten
- Wat zijn 3 functies van de navelstreng?
- Behoefte aan snelheid maakt genoombewerking efficiënt, zo niet beter
- Live hersenactiviteit volgen met de nieuwe NeuBtracker open-source microscoop
- 10 planten verloren in de geschiedenis
- Onderzoekers schijnen de schijnwerpers op illegale handel in wilde orchideeën
- Eerste levensvormen op aarde onthuld in hete lente
- Hoe klimaatverandering subalpiene wilde bloemengemeenschappen kan hervormen
- Opvouwbaar Motorola domineert patentbesprekingen als frissere comeback

- Autoverkopen VS komen tot leven in maart (update)

- Mojo Vision pronkt met displaytechnologie voor augmented reality
- De beste functies selecteren voor detectie-algoritmen voor phishing-aanvallen
- Kunnen bewustzijn en vrije wil de troeven zijn als het gaat om concurreren met robots?

 Wat schattige honden ons kunnen leren over democratie
Wat schattige honden ons kunnen leren over democratie- Onderzoekers ontdekken universele wet voor lichtabsorptie in 2D-halfgeleiders
- Computerstoring in Frankrijk vertraagt honderden vluchten daarbuiten
- Gedetailleerde foto laat zien hoe tandglazuur sterk genoeg is om een leven lang mee te gaan
- Vernietigen waterscooters de planeet?
- De vulkanen van Bali bekijken - vanuit een baan
- Onjuiste breuken veranderen in een gemengd getal
- Hoor geluiden vastgelegd van Mars door NASA's Perseverance rover
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Portuguese | Swedish | German | Dutch | Danish | Norway | Spanish |

-
Wetenschap © https://nl.scienceaq.com
