Wetenschap
Deze robot helpt je voorwerpen op te tillen, door naar je biceps te kijken

Hoofdauteur Joseph DelPreto demonstreert het vermogen van het systeem om zijn bewegingen te spiegelen door spieractiviteit te volgen. Krediet:Joseph DelPreto/MIT CSAIL
Wij mensen zijn erg goed in samenwerken. Bijvoorbeeld, wanneer twee mensen samenwerken om een zwaar voorwerp zoals een tafel of een bank te dragen, ze hebben de neiging om instinctief hun bewegingen te coördineren, voortdurend opnieuw kalibreren om ervoor te zorgen dat hun handen zich op dezelfde hoogte bevinden als die van de andere persoon. Ons natuurlijke vermogen om dit soort aanpassingen te maken, stelt ons in staat om samen te werken aan grote en kleine taken.
Maar een computer of een robot kan nog steeds niet gemakkelijk de leiding van een mens volgen. We programmeren ze meestal expliciet met behulp van machinespraak, of train ze om onze woorden te begrijpen, à la virtuele assistenten zoals Siri of Alexa.
In tegenstelling tot, onderzoekers van MIT's Computer Science and Artificial Intelligence Laboratory (CSAIL) hebben onlangs aangetoond dat een soepelere samenwerking tussen robot en mens mogelijk is door een nieuw systeem dat ze hebben ontwikkeld, waar machines mensen helpen objecten op te tillen door hun spierbewegingen te volgen.
Nagesynchroniseerde RoboRaise, het systeem omvat het plaatsen van elektromyografie (EMG) -sensoren op de biceps en triceps van een gebruiker om de spieractiviteit te controleren. De algoritmen detecteren dan continu veranderingen in de armhoogte van de persoon, evenals discrete op-en-neer handgebaren die de gebruiker kan maken voor een fijnere motoriek.
Het team gebruikte het systeem voor een reeks taken, waaronder het oppakken en monteren van nagemaakte vliegtuigonderdelen. Bij experimenten, gebruikers werkten aan deze taken met de robot en konden deze tot op enkele centimeters van de gewenste hoogte besturen door hun arm op te tillen en vervolgens te spannen. Het was nauwkeuriger wanneer gebaren werden gebruikt, en de robot reageerde correct op ongeveer 70 procent van alle gebaren.
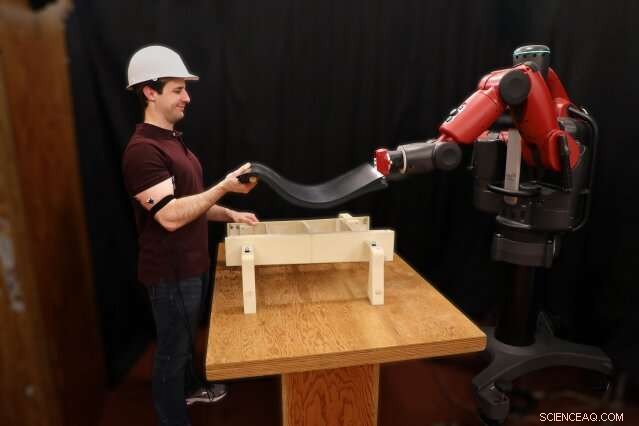
Hoofdauteur Joseph DelPreto demonstreert het vermogen van het systeem om zijn bewegingen te spiegelen door spieractiviteit te volgen. Krediet:Joseph DelPreto/MIT CSAIL
Afgestudeerde student Joseph DelPreto zegt dat hij zich kan voorstellen dat mensen RoboRaise gebruiken om te helpen in productie- en constructieomgevingen, of zelfs als assistent in huis.
"Onze benadering van het optillen van objecten met een robot is bedoeld om intuïtief te zijn en vergelijkbaar met hoe je iets zou kunnen optillen met een andere persoon - door elkaars bewegingen ruwweg te kopiëren en nuttige aanpassingen af te leiden, " zegt DelPreto, hoofdauteur van een nieuw artikel over het project met MIT-professor en CSAIL-directeur Daniela Rus. "Het belangrijkste inzicht is om non-verbale signalen te gebruiken die instructies coderen voor het coördineren, bijvoorbeeld om wat hoger of lager te tillen. Door spiersignalen te gebruiken om te communiceren, wordt de robot bijna een verlengstuk van jezelf dat je vloeiend kunt besturen."
Het project bouwt voort op het bestaande systeem van het team waarmee gebruikers robotfouten onmiddellijk kunnen corrigeren met hersengolven en handgebaren, maakt nu continue beweging mogelijk op een meer collaboratieve manier. "We streven ernaar om mens-robot-interactie te ontwikkelen waarbij de robot zich aanpast aan de mens, in plaats van andersom. Zo wordt de robot een intelligent hulpmiddel voor fysiek werk, ' zegt Rus.
EMG-signalen kunnen lastig zijn om mee te werken:ze maken vaak veel ruis, en het kan moeilijk zijn om precies te voorspellen hoe een ledemaat beweegt op basis van spieractiviteit. Zelfs als je kunt inschatten hoe iemand beweegt, hoe u wilt dat de robot zelf reageert, kan onduidelijk zijn.
RoboRaise omzeilt dit door de mens in controle te geven. Het systeem van het team maakt gebruik van niet-invasieve, sensoren op het lichaam die het afvuren van neuronen detecteren wanneer u spieren aanspant of ontspant. Het gebruik van wearables omzeilt ook problemen met occlusies of omgevingsgeluid, die taken met betrekking tot visie of spraak kunnen compliceren.
Het algoritme van RoboRaise verwerkt vervolgens de activiteit van de biceps om te schatten hoe de arm van de persoon beweegt, zodat de robot het ongeveer kan nabootsen. en de persoon kan zijn arm licht spannen of ontspannen om de robot omhoog of omlaag te bewegen. Als een gebruiker de robot verder van zijn eigen positie moet verwijderen of een tijdje een pose moet aanhouden, ze kunnen alleen maar omhoog of omlaag bewegen voor meer controle; een neuraal netwerk detecteert deze gebaren op elk moment op basis van biceps- en tricepsactiviteit.
Een nieuwe gebruiker kan het systeem zeer snel gebruiken, met minimale kalibratie. Na het plaatsen van de sensoren, ze hoeven alleen hun arm een paar keer aan te spannen en te ontspannen en vervolgens een licht gewicht naar een paar hoogtes te tillen. Het neurale netwerk dat gebaren detecteert, wordt alleen getraind op gegevens van eerdere gebruikers.
Het team testte het systeem met 10 gebruikers door middel van een reeks van drie tilexperimenten:een waarbij de robot helemaal niet bewoog, een andere waar de robot bewoog als reactie op hun spieren, maar niet hielp het object op te tillen, en een derde waar de robot en de persoon samen een object optilden.
Wanneer de persoon feedback had van de robot - wanneer ze hem konden zien bewegen of wanneer ze samen iets optilden - was de bereikte hoogte aanzienlijk nauwkeuriger in vergelijking met het feit dat ze geen feedback hadden.
Het team heeft RoboRaise ook getest op montagetaken, zoals het optillen van een rubberen vel op een basisstructuur. Het was in staat om met succes zowel stijve als flexibele objecten op de basis te tillen. RoboRaise is geïmplementeerd op de Baxter humanoïde robot van het team, maar het team zegt dat het kan worden aangepast voor elk robotplatform.
In de toekomst, het team hoopt dat het toevoegen van meer spieren of verschillende soorten sensoren aan het systeem de vrijheidsgraden zal vergroten, met als uiteindelijk doel nog complexere taken uit te voeren. Aanwijzingen zoals inspanning of vermoeidheid door spieractiviteit kunnen robots ook helpen meer intuïtieve hulp te bieden. Het team testte een versie van het systeem dat biceps- en triceps-niveaus gebruikt om de robot te vertellen hoe stijf de persoon zijn uiteinde van het object vasthoudt; samen, de mens en machine kunnen een object vloeiend rondslepen of strak strak trekken.
Dit verhaal is opnieuw gepubliceerd met dank aan MIT News (web.mit.edu/newsoffice/), een populaire site met nieuws over MIT-onderzoek, innovatie en onderwijs.
 Was de oersoep een stevige pre-eiwitstoofpot?
Was de oersoep een stevige pre-eiwitstoofpot?- Nieuwe fotokatalysatoren kunnen door zonne-energie aangedreven omzetting van koolstofdioxide in brandstof uitvoeren
- At Home Science: Naked Egg Experiment
- Enzymbiofabrieken om navelstrengbloedtransplantaties te verbeteren
- Nieuwe test identificeert snel antibioticaresistente superbacteriën
Hoofdlijnen
- Plant Cell Model Ideeën voor kinderen
- Californische condors keren terug naar de lucht na bijna uitsterven
- De handel in neushoornhoorn legaliseren - reken niet blindelings aan
- Hoe wordt water gevormd tijdens cellulaire ademhaling?
- 3D-verpakking van DNA reguleert celidentiteit
- Schoonmaken van microscoopglaasjes
- Rapport identificeert manieren om de commerciële vissersvloot van Alaska te verjongen
- Hoe Rigor Mortis te onderscheiden van een Cadaveric Spasm
- Woestijnmieren kunnen de betrouwbaarheid van oriëntatiepunten beoordelen terwijl ze op zoek zijn naar de weg naar huis
- Britse autoverkopen stijgen in augustus:branchegegevens

- Robots zijn geoptimaliseerd voor vervelende, repetitieve taken. Kunnen ze worden geautomatiseerd voor complexere werkruimten?
- Disney+ heeft zijn klassiekers, plus Marvel en Star Wars, maar geen R-rated films, beetje eetbuien

- Nieuwe CEO vertelt personeel dat Boeing transparant moet zijn

- NIST virtual reality wil winnen voor de openbare veiligheid


 Immuuncellen weren koolstof-nano-indringers niet altijd af
Immuuncellen weren koolstof-nano-indringers niet altijd af- Tardigrades:vervuilden nu de maan met bijna onverwoestbare kleine wezens
- Hoe weet je of een Bumble Bee mannelijk of vrouwelijk is
- Voorkomen van infectie, genezing vergemakkelijken:nieuwe biomaterialen van spinnenzijde
- Hoe een rots te testen voor goud
- Mogelijk betaalt u te veel voor advertenties op Google, Bing
- Lijst van vissen die bodemvoeders zijn
- Virale marketing:berichtkwaliteit, vertrouwen, en consument die delen op sociale media
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
