Wetenschap
Robots zijn geoptimaliseerd voor vervelende, repetitieve taken. Kunnen ze worden geautomatiseerd voor complexere werkruimten?
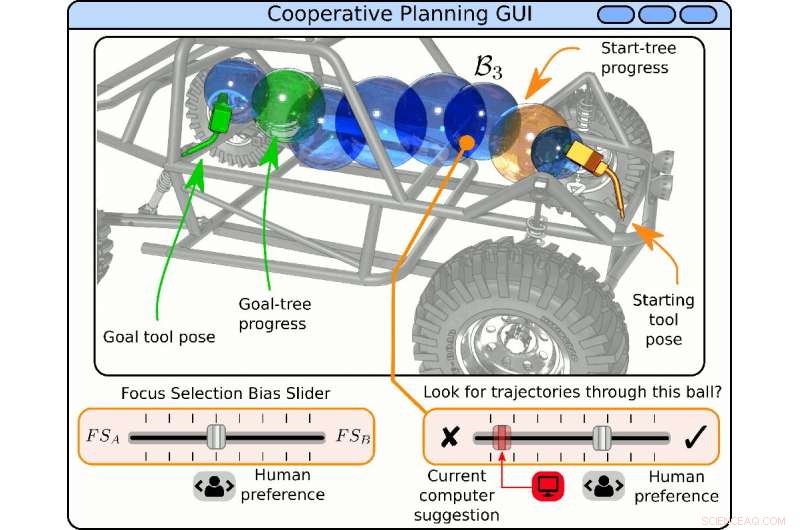
Deze afbeelding toont een grafische gebruikersinterface voor coöperatieve planning, zoals toegepast in een lasomgeving met rolkooien. de padplanner is in eerste instantie belast met het verplaatsen van het lasgereedschap van "startgereedschapshouding" naar "doelgereedschapshouding". Als de padplanner moeilijkheden ondervindt om tot een oplossing te komen, het stelt de menselijke operators op de hoogte, die vervolgens een reeks ballen zal maken die een hint vormen over hoe de robot moet bewegen van "startgereedschapshouding" naar de "doelgereedschapshouding". Menselijke operators kunnen de ballen verplaatsen, verklein de ballen en vervorm in wezen de reeks ballen totdat de padplanner in staat is om de gegeven hints te benutten. Krediet:pradeep rajendran.
Onderzoekers van het USC Viterbi Center for Advanced Manufacturing identificeren een algoritme om robots te optimaliseren om korte, botsingsvrije oplossingen in complexe productieruimten.
Stelt u zich een auto-assemblagefabriek voor:dagelijks moeten duizenden repetitieve taken worden uitgevoerd, zoals het plaatsen van een stuur in een auto. Zodra de robot het beste traject heeft geleerd om van punt A (waar de wielen zijn gestapeld) naar punt B te komen (waar het wiel moet worden geplaatst), het kan dit miljoenen keren uitvoeren, zonder fouten of botsingen.
Echter, als deze taak zelfs maar een klein beetje wordt gewijzigd, bijvoorbeeld door de wielmaat te vergroten, kan de robot de taak niet voltooien.
Om robots te helpen automatiseren om hoogwaardige oplossingen te bieden, zelfs in complexe productiescenario's, onderzoekers van het Centre for Advanced Manufacturing (CAM) van de USC Viterbi School of Engineering hebben een nieuwe benadering geïdentificeerd voor het automatiseren van de paden van robots door hun werkruimten. In onderzoek gepresenteerd op de internationale conferentie over intelligente robots en systemen op 4 november, 2019 in Macao, China, het onderzoeksteam, waaronder professor SK Gupta, Smith International Professor in Mechanical Engineering en CAM-directeur, en Ph.D. kandidaat Pradeep Rajendran, stelde een nieuw algoritme en interface voor padplanning voor die robots begeleidt om de kortste, snelste route van een bronpunt naar een bestemmingspunt in een werkruimte met minimale menselijke input.
"We stellen een aanpak voor om menselijke feedback uit te lokken tijdens de geautomatiseerde padplanning voor manipulators die in zeer complexe werkruimten werken, bijvoorbeeld, satelliet assemblage operaties, "Zei Rajendran. "Typisch, robotoperators gebruiken een automatische padplanner om een traject te plannen voor de robot om de taak binnen de werkruimte te voltooien. Als padplanning mislukt - wat betekent dat het voorgestelde traject niet de gewenste resultaten oplevert - moeten robotoperators handmatig waypoints invoeren - specifieke punten langs het pad om de robot van zijn bron naar zijn bestemming te leiden."
Deze situatie doet zich vaker voor in complexe of krappe werkruimten, zoals de operatie voor de assemblage van satellieten, waar moeilijkere werkruimtegeometrieën, fysieke obstakels en frequentere veranderingen of aanpassingen vereisen dat robots complexe paden uitvoeren. Als resultaat, robotoperators verspillen kostbare tijd met het handmatig invoeren van informatie voor elk scenario, het doel van het gebruik van automatisering in de eerste plaats verslaan.
Het algoritme werkt door een gebruiksvriendelijke interface voor de robot te bieden om de input van de menselijke operator vroeg in de padplanning te verzamelen - het proces van het in kaart brengen van de route die de robot door de werkplek moet nemen om zijn taak te volbrengen. De menselijke operator wordt gewaarschuwd, door visuele aanwijzingen in het programma, naar de meer complexe gebieden die de robot moet navigeren en kan dienovereenkomstig informatie verstrekken, richtlijnen op hoog niveau te produceren. Als resultaat, wanneer de robot kleine veranderingen in zijn taak tegenkomt, zoals de bovengenoemde toename van de wielmaat, kan hij op deze richtlijnen putten en zijn pad dienovereenkomstig aanpassen.
De methode die is bedacht door onderzoekers van het Department of Aerospace and Mechanical Engineering van USC Viterbi, waaronder ook postdoctoraal onderzoeksmedewerker Ariyan Kabir, doctoraat student Shantanu Thakar en CAM-onderzoeker Brual Shah - geeft prioriteit aan automatisering, ervoor te zorgen dat het programma voor padplanning alleen hulp uitlokt wanneer dat nodig is. Het duurt doorgaans 15 tot 30 minuten om handmatig een pad op te geven; met het padplanningsalgoritme, het pad kan binnen enkele seconden worden gegenereerd.
"In de productie van kleine volumes, robots voeren veel niet-repetitieve taken uit die vaak veranderen. Het programmeren van robots voor elk van deze iteraties van taken is niet alleen tijdrovend, het is vervelend en inefficiënt, " zei Rajendran. "Met dit nieuwe algoritme, we demonstreren dat veel niet-repetitieve processen die voorkomen in kleine productietoepassingen gemakkelijk kunnen worden geautomatiseerd, met minimale input van menselijke operators."
 Kristalstructuurvoorspelling van willekeurige legering met meerdere elementen
Kristalstructuurvoorspelling van willekeurige legering met meerdere elementen- Wetenschappers ontwikkelen volledig door zonne-energie aangedreven autonome chemische minifabriek
- Ingenieurs ontwikkelen slim materiaal dat van stijfheid verandert wanneer het wordt gedraaid of gebogen
- Startups online systeem helpt bij kwantitatieve risicobeoordelingen van chemicaliën
- Natuurlijke conserveermiddelen in opmars
- Hoe isoleer ik bacteriën van de bodem?
- Japan lanceert onderzoek naar vermoedelijke Chinese koraalstroperij
- Coronavirus:effect van lockdowns op luchtvervuiling biedt zeldzame blik op koolstofarme toekomst
- Microplastics gevonden in grootste ijskap van Europa
- Bedrijven stemmen in met transparantie over klimaatlobby
Hoofdlijnen
- Hoe gedraag je je in een dierentuin - volgens de wetenschap
- Nieuwe software kan binnen enkele minuten iemands identiteit verifiëren aan de hand van hun DNA
- DNA Extraction by Spooling Method
- Hoe een Western Blot te lezen
- Urban Coopers-haviken overtreffen hun landelijke buren
- Hoe goed kennen mensen zichzelf eigenlijk?
- Parasitaire ooginfectie vormt een aanzienlijke bedreiging voor Britse honden, waarschuw experts
- DNA-replicatie vergelijken en contrasteren in prokaryoten en eukaryoten
- Biogeografie: definitie, theorie, bewijs & voorbeelden
- Uit liefde voor techniek! Seksrobots en virtual reality

- 3 internettaaltrends van 2019, uitgelegd

- Bombardier elektrische hybride trein om de groene ambities van Duitsland op koers te houden

- Hardwareversnellers aan het werk zetten met automatische codevertaling

- Smartphone-video's produceren zeer realistische 3D-gezichtsreconstructies


 Een mooie reactie daarop:nieuwe synthetische routes voor diverse aromatische verbindingen
Een mooie reactie daarop:nieuwe synthetische routes voor diverse aromatische verbindingen- NASA helpt waarschuwen voor schadelijke algenbloei in meren, reservoirs
- Hoe Antilog
- Helderdere flexibele elektroluminescente film door de oogstructuur van nachtdieren aan te nemen
- Nanodeeltjes optimaliseren voor commerciële toepassingen
- Aanhoudende motregen bij temperaturen onder nul op Antarctica
- Menselijke invloed op de atmosfeer van de aarde
- Stormjagers op Mars op zoek naar stoffige geheimen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
