Wetenschap
Ingenieurs bouwen een zacht waarnemingssysteem voor robotica, geïnspireerd door mensen

Een internationaal team van onderzoekers heeft een waarnemingssysteem voor zachte robots ontwikkeld, geïnspireerd op de manier waarop mensen informatie over hun eigen lichaam verwerken in de ruimte en in relatie tot andere objecten en mensen. Ze beschrijven het systeem, waaronder een motion capture-systeem, zachte sensoren, een neuraal netwerk, en een zachte robotvinger, in het nummer van 30 januari van Wetenschap Robotica . Krediet:Universiteit van Californië, San Diego
Een internationaal team van onderzoekers heeft een waarnemingssysteem voor zachte robots ontwikkeld, geïnspireerd op de manier waarop mensen informatie over hun eigen lichaam verwerken in de ruimte en in relatie tot andere objecten en mensen. Ze beschrijven het systeem, waaronder een motion capture-systeem, zachte sensoren, een neuraal netwerk, en een zachte robotvinger, in het nummer van 30 januari van Wetenschap Robotica .
Het uiteindelijke doel van de onderzoekers is om een systeem te bouwen dat de bewegingen en de interne toestand van een robot kan voorspellen zonder afhankelijk te zijn van externe sensoren. net zoals mensen dat elke dag doen. in hun Wetenschap Robotica papier, ze laten zien dat ze dit doel hebben bereikt voor een zachte robotvinger. Het werk heeft toepassingen in mens-robot interactie en draagbare robotica, evenals zachte apparaten om aandoeningen die spieren en botten aantasten te corrigeren.
Het systeem is bedoeld om de verschillende componenten na te bootsen die mensen nodig hebben om door hun omgeving te navigeren:het motion capture-systeem staat voor visie; het neurale netwerk staat in voor hersenfuncties; de sensoren voor aanraking; en de vinger voor het lichaam in interactie met de buitenwereld. Het motion capture-systeem is er om het neurale netwerk te trainen en kan worden weggegooid zodra de training is voltooid.
"De voordelen van onze aanpak zijn het vermogen om complexe bewegingen en krachten te voorspellen die de zachte robot ervaart (wat moeilijk is met traditionele methoden) en het feit dat het kan worden toegepast op meerdere soorten actuatoren en sensoren, " zei Michael Tolley, een professor in mechanische en ruimtevaarttechniek aan de Universiteit van Californië in San Diego en senior auteur van het artikel. "Onze methode omvat ook redundante sensoren, wat de algehele robuustheid van onze voorspellingen verbetert."
-

De zachte robotvinger geeft haptische en bewegingsinformatie aan het systeem. Krediet:Universiteit van Californië, San Diego
-
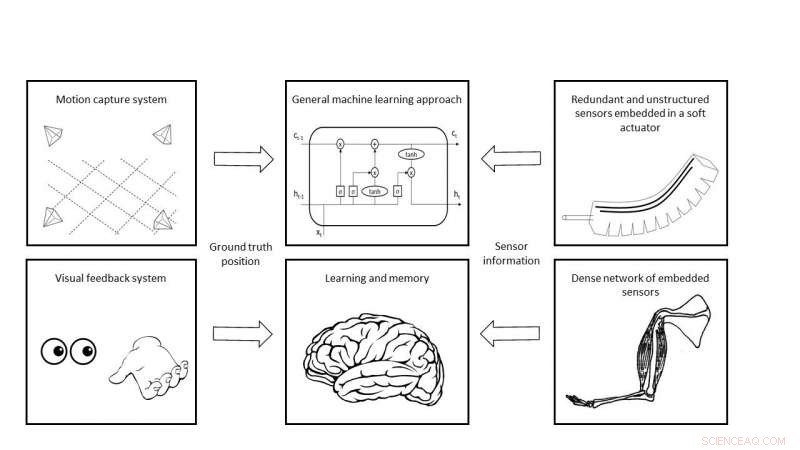
Overzicht van de modelleringsarchitectuur en de parallel met het menselijke waarnemingssysteem. Krediet:Universiteit van Californië, San Diego
Onderzoekers hebben zachte spanningssensoren willekeurig ingebed in de zachte robotvinger, wetende dat ze zouden reageren op een grote verscheidenheid aan bewegingen, en gebruikte machine learning-technieken om de signalen van de sensoren te interpreteren. Hierdoor kon het team waaronder onderzoekers van het Bioinspired Robotics and Design Lab van UC San Diego, om krachten te voorspellen die worden toegepast op, en bewegingen van, de vinger. Deze benadering stelt onderzoekers in staat modellen te ontwikkelen die krachten en vervormingen kunnen voorspellen die worden ervaren door zachte robotsystemen terwijl ze bewegen.
Dit is belangrijk omdat de technieken die traditioneel worden gebruikt in robotica voor het verwerken van sensorgegevens de complexe vervormingen van zachte systemen niet kunnen vastleggen. In aanvulling, de informatie die de sensoren vastleggen is al even complex. Als resultaat, sensorontwerp, plaatsing en fabricage in zachte robots zijn moeilijke taken die enorm zouden kunnen worden verbeterd als onderzoekers toegang hadden tot robuuste modellen. Dit is wat het onderzoeksteam hoopt te bieden.
De volgende stappen omvatten het opschalen van het aantal sensoren om de dichte detectiemogelijkheden van biologische huid beter na te bootsen en het sluiten van de lus voor feedbackcontrole van de actuator.
 Handdesinfecterend middel opnieuw ontwerpen en doneren 7, 000 gallons om COVID-19 te bestrijden
Handdesinfecterend middel opnieuw ontwerpen en doneren 7, 000 gallons om COVID-19 te bestrijden- Wetenschappers behalen nieuwe resultaten in de studie van anorganische pigmenten met apatietstructuur
- Type energie geproduceerd door fotosynthese
- Een nieuw facet van brandstofcelchemie
- Hoe ischemische isotoopproblemen op te lossen
- Liana's verstikken de fruit- en zaadproductie van bomen in tropische bossen
- Hoe herstel van de impact van COVID-19 op de energievraag kan helpen om de klimaatdoelstellingen te halen
- Geografie gebruiken om landbeleid en -beheer te verkennen
- Onderwaterverdediging:nieuwe manieren om duikers in de diepte te beschermen
- Australië beleeft heetste zomer ooit beetje opluchting in zicht
Hoofdlijnen
- Wetenschappers dringen aan op bedreigde lijst van cheeta's
- Nieuwe vogelsoort genoemd naar Harvard-vader van biodiversiteit
- Voorbeelden van genetische kenmerken
- Waar worden mensen blij van?
- Amerikaans sage hoenbeleid keert terug naar af
- Gezondheidsonderzoekers visualiseren een leven in silico
- Bescherming van het wild:professor helpt recreatieverstoring voor dieren in het wild tot een minimum te beperken
- Wat doet een bladcel?
- Overeenkomsten tussen bacteriën en protisten
- Nieuwe autoverwarmingstechnologie geeft geen uitstoot

- De prijs van AI-kunst:is de zeepbel gebarsten?
- Apple zal naar verluidt al in maart een veel goedkopere iPhone uitbrengen

- Boeing-leverancier Spirit AeroSystems ontslaat 2, 800 arbeiders

- Amazon-werknemers van over de hele wereld bundelen hun krachten in Berlijn


 Nieuwe technologie levert hightech film die elektromagnetische interferentie blokkeert
Nieuwe technologie levert hightech film die elektromagnetische interferentie blokkeert- Een nieuwe studie vindt onderzoekslacunes in milieuwetenschappelijke disciplines in het Noordpoolgebied
- Wetten op de bijenteelt
- Eerste openbare voorspellingen van ViEWS, een systeem voor vroegtijdige waarschuwing bij politiek geweld
- Noordoost-gouverneurs traag om regionaal klimaatpact te omarmen
- Oproep voor dringende maatregelen tegen klimaatverandering om de wereldwijde voedselvoorziening veilig te stellen
- Converteren naar inches centimeter
- Nieuw onderzoek biedt oplossing voor raadsel van koolstofopslag in de oceaan
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
