Wetenschap
Een gedecentraliseerd algoritme voor het genereren van banen voor systemen met meerdere robots
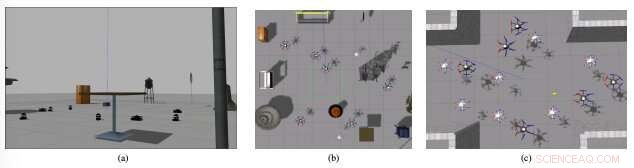
Snapshots terwijl de robots door verschillende onbekende omgevingen navigeren met behulp van het algoritme dat in dit werk wordt voorgesteld. Krediet:Govind Aadithya R et al.
Onderzoekers van het SRM Institute of Science and Technology in India hebben onlangs een gedecentraliseerd algoritme voor het genereren van banen ontwikkeld voor systemen met meerdere agenten. Hun algoritme, gepresenteerd in een paper dat vooraf is gepubliceerd op arXiv, kan botsingsvrije trajecten voor robots genereren indien voorzien van een begintoestand en gewenste eindhouding.
"Govind en zijn team benaderden me ambitieus op zoek naar mijn suggestie voor hun bachelorproject, "Sivanathan K, senior onderzoeker die het onderzoek begeleidde, vertelde TechXplore. "Het kennen van hun wiskundige vermogen, Ik vond dat ze een uitdagend probleem toegewezen moesten krijgen dat de toekomst wacht om op te lossen. Terwijl de wereld op weg is naar autonome auto's, Ik stelde voor om een gedecentraliseerd algoritme te ontwikkelen voor autonome voertuigen om kruispunten te navigeren. We waren van mening dat de prestaties van het algoritme niet aan de normen voldeden, dus hebben we het werk uitgebreid tot het ontwikkelen van een algoritme waarmee autonome voertuigen door een onbekende omgeving kunnen navigeren, botsing met andere robots/obstakels vermijden."
Multi-robotsystemen omvatten een aantal robotagenten of autonome voertuigen die samenwerken aan verschillende taken. Deze systemen kunnen interessante toepassingen hebben op een aantal gebieden, inclusief vervoer, amusement, veiligheid en verkenning van de ruimte.
Wanneer meerdere robots samenwerken aan een bepaalde taak, hun trajecten vereisen een zorgvuldige planning om ervoor te zorgen dat de robots niet met elkaar in botsing komen en dat hun dynamische limieten niet worden overschreden. Tot dusver, de meeste benaderingen voor het genereren van trajecten zijn gecentraliseerd, wat betekent dat ze vooraf trajecten genereren en deze vervolgens doorgeven aan individuele robots.
Hoewel gecentraliseerde benaderingen goed werken in bekende omgevingen en met een beperkt aantal robots, ze zijn erg moeilijk toe te passen op grotere schaal. In recente jaren, daarom, onderzoekers hebben gewerkt aan gedecentraliseerde benaderingen die continu trajecten kunnen herplannen, reageren op onverwachte veranderingen of obstakels in de omgeving.
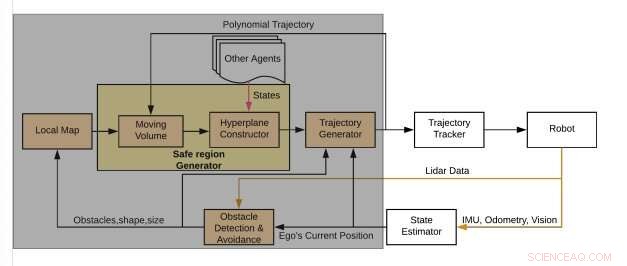
Het systeemoverzicht van een individuele agent. De oranje pijlen vertegenwoordigen onbewerkte gegevens, rood staat voor gegevens van externe bronnen en zwart staat voor verwerkte gegevens en stroomzijde. De focus van dit werk is het gearceerde gedeelte. Krediet:Govind Aadithya R et al.
Het team van onderzoekers van het SRM Institute heeft een nieuw gedecentraliseerd algoritme ontwikkeld voor het genereren van trajecten van multi-agentsystemen. Hun aanpak volgt een proces in twee stappen, het genereren van botsingsvrije convexe gebieden waarin een robot wordt beperkt, door de posities van andere robots te voorspellen.
"Onze aanpak heeft twee subdoelen. De eerste is de identificatie van de omgeving, waaronder het genereren van kaarten voor het zelf en het voorspellen van een traject voor anderen in de omgeving om het veilige gebied van het ego (vanuit het oogpunt van het betreffende voertuig) te identificeren, "Govind Aadithya R, een van de onderzoekers die het onderzoek heeft uitgevoerd, Vertelde TechXplore. "Daarna komt het doel van navigatie binnen de veilige regio om de gewenste bestemming te bereiken, waarvoor we het traject van het ego genereren met de beschikbare informatie en het regelmatig opnieuw plannen om rekening te houden met veranderingen die rond het ego plaatsvinden. Om ervoor te zorgen dat het ego zich langs het gespecificeerde pad beweegt, de toestanden worden gevolgd met behulp van een trajecttracker."
Govind en zijn collega's gebruikten een eenvoudige methode voor het detecteren van obstakels, met behulp van lokale, op vormen gebaseerde kaarten om veilige regio's voor individuele agenten te formuleren. Op basis van deze gegevens, hun algoritme voorspelt trajecten voor andere robots en neemt deze op in het model om botsingen te voorkomen door het formaat van de regio's waarin een robot kan navigeren zonder te botsen te wijzigen.
"Voor mij, een van de meest betekenisvolle conclusies van dit werk is dat continue controle op botsingen van het allergrootste belang is voor veilige navigatie zonder botsingen, " Shravan Krishnan, een andere onderzoeker die bij het onderzoek betrokken was, vertelde TechXplore. "Ook, voor het vermijden van botsingen, we ontdekten dat complexe kaarttechnieken niet van het grootste belang zijn, maar nog steeds een noodzaak zijn bij optimaal gebruik van de ruimte. Dit houdt in dat voor conservatieve manoeuvres, de obstakelrepresentaties op basis van eenvoudige geometrie zijn voldoende, maar voor dynamische en agressieve manoeuvres die volledige ruimte gebruiken, complexe geometrieën zijn een noodzaak."
De onderzoekers evalueerden hun aanpak in simulaties op het Gazebo-platform, het gebruik van ROS met platte luchtrobots en niet-holonomische robots op wielen; in zowel kruispuntachtige als ongestructureerde omgevingen. Hun algoritme was in staat om effectief vloeiende trajecten te genereren in beperkte omgevingen, botsingen tussen robots te vermijden.
"Hiermee vooruitgaan, we willen het algoritme uitbreiden in 3D, nog een dimensie toevoegen, "Vijay Arvindh B, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "We werken momenteel aan de gebreken die moeten worden verholpen om het algoritme in 3D te evalueren."
© 2019 Wetenschap X Netwerk
 De waterstofproductie versnellen door de magische topologische oppervlaktetoestanden
De waterstofproductie versnellen door de magische topologische oppervlaktetoestanden- Onderzoek toont aan dat druk ongewoon hoge elektrische geleidbaarheid induceert in polyjodide
- Forensisch chemicus stelt zweetteststrip voor als vervanging voor ademanalyse
- Geavanceerde microscopie onthult ongebruikelijke DNA-structuur
- Wetenschappers stellen een nieuwe methode voor om gevaarlijke stikstofhoudende vloeistoffen op te sporen
- Onderzoekers helpen in kaart brengen en zoeken naar hydrothermale bronnen in de Golf van Californië
- Lessen over klimaatverandering uit Afrika:kennis is de sleutel
- Combinaties van gemarginaliseerde identiteiten kunnen klimaatadaptatie in Peru beperken
- NOAA-NASA Suomi NPP vangt branden en spuitbussen in heel Amerika op
- Hoeveel bacteriën leven er op aarde?
Hoofdlijnen
- Huidige vee-injecties verhogen het risico op letsel, onderzoek vindt
- Analyse van oud DNA onthult een voorheen niet-herkend geslacht van uitgestorven paarden dat ooit door Noord-Amerika zwierf
- Wat is een zuivere eigenschap en een hybride eigenschap?
- Verrassende ontdekking - hoe de Afrikaanse tseetseevlieg echt je bloed drinkt
- Welke functie vervullen spillen tijdens mitose?
- Pas op voor de huisdieren bij het hanteren van de Halloween-snoepvangst
- In de mangoestenmaatschappij immigranten zijn een bonus - als ze tijd krijgen om zich te vestigen
- Nieuw boek van biologen beschrijft een nieuw tijdperk in de studie van evolutie
- Hoe uw dieet het dierenwelzijn kan verbeteren
- Bestrijd aanstootgevende taal op sociale media met onbewaakte overdracht van tekststijl

- VS raakt datingoperator om valse berichten over liefdesbelangen

- Ontwikkelaar opent hub om Amerikaanse offshore windindustrie te laten groeien

- Machine learning gebruikt om boeren te helpen bij het selecteren van optimale producten die geschikt zijn voor hun bedrijf

- Samsung en Apple staan weer voor de rechter over het ontwerp van de iPhone. Dit is waarom.


 Egypte:archeologen ontdekken oude tombe met mummies
Egypte:archeologen ontdekken oude tombe met mummies- Nieuwe katalysator kan betere lithium-zwavelbatterijen mogelijk maken, voeding van de volgende generatie elektronica
- Door te bezuinigen op milieu-uitgaven, de overheid snijdt kansen
- De geschiedenis van windvinnen
- Harde röntgenflits breekt snelheidsrecord
- Onderzoekers ontwikkelen nieuwe methode om atoomplaten te isoleren en nieuwe materialen te maken
- Nieuwe waarnemingen van zwart gat dat een ster verslindt onthullen snelle schijfvorming
- Klittenbandachtige voedselsensor detecteert bederf en besmetting
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | German | Dutch | Danish | Norway | Swedish |

-
Wetenschap © https://nl.scienceaq.com
