Wetenschap
Nieuwe vliegende robot bootst snelle insectenvlucht na

DelFly Nimble in stationaire (zwevende) vlucht. Credit:Henri Werij, TU Delft
Een nieuwe op insecten geïnspireerde vliegende robot, ontwikkeld door TU Delft onderzoekers van het Micro Air Vehicle Laboratory (MAVLab), wordt gepresenteerd in Wetenschap (14-09-2018). Experimenten met deze eerste autonome, vrij vliegende en behendige flapperende robot verbetert het begrip van hoe fruitvliegen agressieve ontsnappingsmanoeuvres beheersen. Afgezien van zijn potentieel in onderzoek naar insectenvluchten, de uitzonderlijke vliegeigenschappen van de robot openen nieuwe drone-toepassingen.
Vliegende dieren drijven zowel de vlucht als de controle door met hun vleugels te klapperen. Hierdoor kunnen kleine natuurlijke vliegers zoals insecten dicht bij een bloem zweven, maar ook om snel aan gevaar te ontsnappen. Dierenvluchten hebben altijd de aandacht getrokken van biologen, die niet alleen hun complexe vleugelbewegingspatronen en aerodynamica bestuderen, maar ook hun sensorische en neuromotorische systemen tijdens zulke behendige manoeuvres. Onlangs, vliegende dieren zijn ook een inspiratiebron geworden voor robotica-onderzoekers, die lichtgewicht vliegende robots proberen te ontwikkelen die wendbaar zijn, energiezuinig en zelfs schaalbaar tot insectengrootte.
TU Delft-onderzoekers van het MAVLab hebben een nieuwe op insecten geïnspireerde vliegende robot ontwikkeld; tot nu toe ongeëvenaard in zijn prestaties, met een eenvoudig en gemakkelijk te produceren ontwerp. Net als bij vliegende insecten, de fladderende vleugels van de robot, 17 keer per seconde slaan, niet alleen de liftkracht genereren die nodig is om in de lucht te blijven, maar bestuur ook de vlucht via kleine aanpassingen in de vleugelbeweging. Geïnspireerd door fruitvliegjes, de besturingsmechanismen van de robot zijn zeer effectief gebleken, waardoor het ter plaatse kan zweven en met hoge behendigheid in elke richting kan vliegen.
"De robot heeft een topsnelheid van 25 km/u en kan zelfs agressieve manoeuvres uitvoeren, zoals 360-graden flips, die op lussen en looprollen lijken, " zegt Matěj Karásek, de eerste auteur van de studie en hoofdontwerper van de robot. "Bovendien, de 33 cm spanwijdte en 29 gram robot heeft een uitstekende energie-efficiëntie voor zijn grootte, het toestaan van vijf minuten zwevende vlucht of meer dan 1 km vliegbereik op een volledig opgeladen batterij."
Onderzoek naar ontsnappingsmanoeuvres van fruitvliegen
De vliegprestaties van de robot, gecombineerd met de programmeerbaarheid, maken het ook zeer geschikt voor onderzoek naar insectenvlucht. Hiertoe, De TU Delft heeft samengewerkt met Wageningen Universiteit. "Toen ik de robot voor het eerst zag vliegen, Ik was verbaasd over hoe sterk zijn vlucht leek op die van insecten, vooral bij het manoeuvreren. Ik dacht meteen dat we het konden gebruiken om de vluchtcontrole en dynamiek van insecten te onderzoeken, " zegt prof. Florian Muijres van de groep Experimentele Zoölogie van Wageningen University &Research. Vanwege het eerdere werk van prof. Muijres over fruitvliegen, het team besloot de robot te programmeren om de veronderstelde controleacties van de insecten na te bootsen tijdens snelle ontsnappingsmanoeuvres, zoals die om meppen te voorkomen.
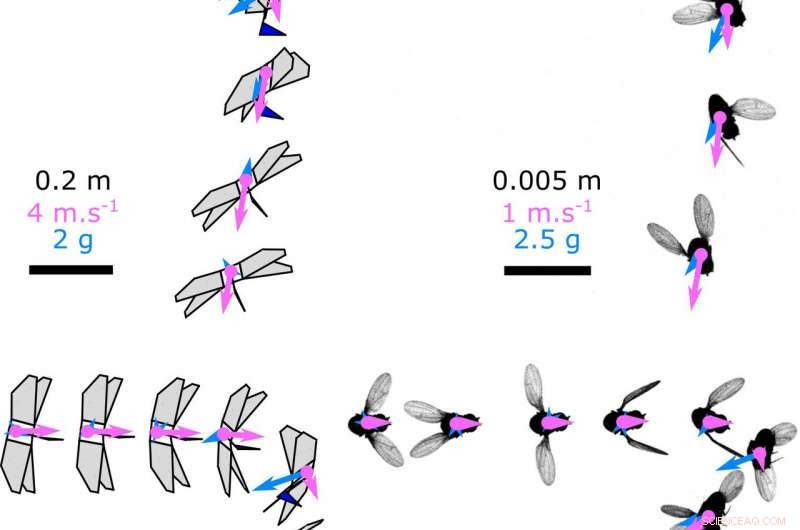
DelFly Nimble (links) maakt snelle bochten die sterk lijken op die van fruitvliegjes wanneer we ze proberen te meppen (rechts). Credit:TU Delft (CC BY-SA 4.0)
De manoeuvres die door de robot werden uitgevoerd, leken sterk op die bij fruitvliegen. De robot kon zelfs demonstreren hoe fruitvliegen de draaihoek regelen om hun ontsnappingsprestaties te maximaliseren. "In tegenstelling tot dierproeven, we hadden de volledige controle over wat er in het 'brein' van de robot gebeurde. Hierdoor konden we een nieuw passief aerodynamisch mechanisme identificeren en beschrijven dat de vliegen helpt, maar mogelijk ook andere vliegende dieren, bij het sturen van hun richting tijdens deze snelle bochten, ", voegt Karásek eraan toe.
Potentieel voor toekomstige toepassingen
Binnen het DelFly-project ontwikkelt het MAVLab al meer dan 10 jaar op insecten geïnspireerde vliegende robots. De wetenschappelijke leider van MAVLab, Prof. Guido de Croon, zegt, "Op insecten geïnspireerde drones hebben een groot potentieel voor nieuwe toepassingen, omdat ze lichtgewicht zijn, veilig in de buurt van mensen, en efficiënter kunnen vliegen dan meer traditionele drone-ontwerpen, vooral op kleinere schaal. Echter, tot nu, deze vliegende robots hadden niet voldoende behendigheid, en ze vereisten een te complex productieproces." De robot in deze studie, genaamd de DelFly Nimble, bouwt voort op gevestigde productiemethoden, maakt gebruik van kant-en-klare componenten, en zijn vluchtduurzaamheid is lang genoeg om interessant te zijn voor toepassingen in de echte wereld.

DelFly Nimble in voorwaartse vlucht. Krediet:Matej Karasek, TU Delft (CC BY-SA 4.0)
De DelFly Nimble wordt verder ontwikkeld binnen het TTW-project, "Zo lenig als een bij, " wat een samenwerking is tussen de TU Delft en Wageningen Universiteit, gefinancierd door de Nederlandse wetenschapsstichting NWO.
 Drone- en landsat-beelden tonen langdurige verandering in vegetatiebedekking langs intermitterende rivier
Drone- en landsat-beelden tonen langdurige verandering in vegetatiebedekking langs intermitterende rivier- Studie zegt dat door China gesteunde dam Mekong . zou vernietigen
- Vissen profiteren als grote dammen een nieuwe manier van werken aannemen
- 3D-modellen helpen wetenschappers de impact van overstromingen te meten
- Overgaan op bietensap en bier om het gevaar van strooizout aan te pakken
Hoofdlijnen
- Gebruik van microscopen in Science
- Sumatraanse tijgers op weg naar herstel in gevaar UNESCO-werelderfgoed
- Onderzoek naar parasieten effent de weg voor infectietherapieën
- Hoe beïnvloedt de temperatuur het metabolisme?
- Zijn mannen of vrouwen betere navigators?
- Landen in de Stille Oceaan kunnen door klimaatverandering 50 - 80% van de vis in lokale wateren verliezen
- Wat een grote handtekening kan zeggen over je persoonlijkheid
- Een nieuwe manier om mRNA-genomen af te leveren:nucleocapsiden met evolutionaire eigenschappen
- Waar vindt ademhaling plaats?






 nieuwe studie, detaillering van 22 jaar durend wereldwijd burgerwetenschappelijk project werpt licht op raadselachtige bedreigde walvishaaien
nieuwe studie, detaillering van 22 jaar durend wereldwijd burgerwetenschappelijk project werpt licht op raadselachtige bedreigde walvishaaien- Verkeerde uitspraak:waarom je moet stoppen met het corrigeren van fouten van mensen
- Pandemie brengt grotere risico's met zich mee, benadrukt voor Californische raciale minderheden, poll vondsten
- NASA bedekt orkaan Isaacs haveloze centrum
- Een gestresste baas is een slechte baas, onderzoek concludeert
- Studie:Toename van cannabisteelt of woningbouw kan van invloed zijn op de watervoorraden
- Winterstormen teisteren grote delen van de VS
- Een deukje maken:Japanse sonde bereidt zich voor om asteroïde te ontploffen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
