Wetenschap
Hoe bouw je een robot die de bewegingen van dieren nabootst - en waarom zou je dat willen?

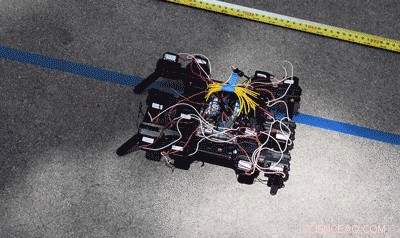
Een robot met vier poten is geïnspireerd op de beweging van een kat. Krediet:Foto/Daiming Yang
Van glijden en lopen tot vliegen of zwemmen, dieren kunnen relatief gemakkelijk bewegen en communiceren met hun omgeving. Echter, het bouwen van een robot met dezelfde mogelijkheden is veel moeilijker.
"Robotici kijken met veel jaloezie naar wezens in de natuurlijke wereld, " zei Satyandra "S.K." Gupta, die een Smith International Professorship in Mechanical Engineering heeft aan de USC Viterbi School of Engineering.
“Inspiratie halen uit de natuur biedt nieuwe mogelijkheden om nieuwe robots te realiseren. bio-geïnspireerde robotica is naar voren gekomen als een belangrijke specialisatie op het gebied van robotica, " zei Gupta, associate afdelingsvoorzitter van de afdeling Aerospace and Mechanical Engineering en directeur van het Centre for Advanced Manufacturing.
Door natuurlijke bewegingen na te bootsen, deze wezenachtige robots kunnen gaan waar traditionele robots dat niet kunnen, zoals het moeilijke terrein van rampgebieden. Ze kunnen worden gebruikt om levens te redden, de beveiliging verbeteren of afgelegen locaties verkennen. In aanvulling, het aanpassen van biologische eigenschappen kan leiden tot robuustere of energiezuinigere robots.
Robots die dieren nabootsen:nieuwe mogelijkheden
In "Biologisch geïnspireerde robotica, "een undergraduate cursus gegeven door Gupta, studenten keken naar de natuur voor nieuwe mogelijkheden in robotontwerp. Na het leren over de fundamenten van traditionele robotica en de rol van biologisch geïnspireerd ontwerp, studenten kregen de opdracht om hun eigen robot te bouwen en te programmeren op basis van de bewegingen van dieren.
Krediet:Ashleen Knutsen
Daiming Yang, Chenchen Huang en Shijing Lu kozen ervoor om een vierpotige robot te bouwen die de beweging van een kat nabootst.
In tegenstelling tot honden of paarden, katten lopen met hun voorpoten naar voren gebogen in plaats van naar achteren, die "singulariteiten" kunnen creëren in robotbewegingsanalyse, zei Yang.
Een ander team koos ervoor om een robot te maken die zijwaarts liep als een krab.
"Ons team probeerde de passief stabiele dynamiek [reeksen vallen] vast te leggen die krabben maken als ze langzaam lopen, " zei Pamela Denny, wiens teamgenoten Mary Bessell en Yan Zhang waren. "De moeilijkste taak was om de robot in elkaar te zetten en alle wrijving van de gewrichten te verwijderen. Dit was een zeer gedetailleerde en complexe taak omdat er 12 gewrichten moesten worden ingesteld, uitlijnen en aanpassen."

Studenten kijken naar de vierbenige, katachtige robot baant zich een weg over de baan. Krediet:Satyandra "S.K." Gupta
Eind april, de negen teams presenteerden hun projecten aan de klas en demonstreerden het unieke vermogen van hun robot. Door te lopen, kruipen of zijwaarts stappen, elke robot baande zich een weg naar beneden over een baan die 30 keer langer was dan de lengte van zijn lichaam, wat het succes van een semester-lange inspanning betekent.
"Ons team was zo blij om een krab te maken die echt werkte, "Zei Denny. "Het was erg leuk en ik raad de les ten zeerste aan."
 Chemici maken een molecuul dat kan helpen bij de behandeling van hartaandoeningen en het opsporen van virussen
Chemici maken een molecuul dat kan helpen bij de behandeling van hartaandoeningen en het opsporen van virussen- Ferrofluide oppervlaktesimulaties gaan verder dan alleen de huid
- Geleidend papier kan toekomstige flexibele elektronica mogelijk maken
- Synthetische fysiologen ontwikkelen nieuwe receptor uitgeschakeld door groen licht
- Een nieuwe microscoop onthult het wonder van moleculaire zuurstof
- Frankrijk gaat landbouwchemicaliën in de lucht controleren
- Filippijnse vulkaan spuwt lavafonteinen, 56, 000 mensen vluchten (update)
- Slechte problemen en hoe ze op te lossen
- Hoe een Trump-grensmuur de natuur zou beïnvloeden?
- Zonder werk in lockdown, touroperators hielpen bij het vinden van koraalverbleking op de afgelegen riffen van West-Australië
Hoofdlijnen
- Wetenschappers lokaliseren jaloezie in de monogame geest
- Hoe Agarose Gel te interpreteren
- Hoe Dopamine werkt
- Hoe overleef je een massale uitsterving?
- Ocean meeting haalt meer dan $7 miljard op voor mariene bescherming
- Kunnen we Neanderthalers terugbrengen?
- De functie van veel eiwitten blijft onduidelijk
- Mariene robots detecteren walvissen in de diepe oceaan
- De levenscyclus van Gymnosperms
- SRNL-stralingsdetectiesystemen in de havens van Tacoma en NY/NJ

- EU:Facebook verandert voorwaarden om te laten zien dat het geld verdient met data

- T-Mobile belooft consumentenvoordelen als Sprint-deal OKd

- Vijf manieren waarop AI je auto net zo slim kan maken als een menselijke passagier

- Twitter-medewerkers vertelden dat ze vanuit huis moesten werken vanwege angst voor virussen


 Impuls (natuurkunde): definitie, vergelijking, berekening (met voorbeelden)
Impuls (natuurkunde): definitie, vergelijking, berekening (met voorbeelden) - Plaats van de volgende grote aardbeving op de San Andreas-breuk?
- Hoe COVID het arbeidsrecht verandert
- Afbeelding:ESA's eerste geautomatiseerde overdrachtsvoertuig
- Wat als we konden voorspellen wanneer een atleet geblesseerd zou raken?
- De stijgende kosten van natuurbrandbestrijding vallen grotendeels buiten de controle van Forest Services
- Superblocks-model zou jaarlijks bijna 700 vroegtijdige sterfgevallen in Barcelona kunnen voorkomen
- Nieuw onderzoek houdt rekening met toekomstige interacties met computergegenereerde mensen in virtual reality
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
