Wetenschap
Afbeelding:DLR's Rollin Justin robot

Krediet:DLR
Aanstaande vrijdag 17 augustus, ESA-astronaut Alexander Gerst zal deze humanoïde robot Rollin' Justin leiden - gevestigd in de vestiging van het DLR German Aerospace Center in Oberpfaffenhofen, Duitsland - van aan boord van het internationale ruimtestation, vliegen met 28.800 km/u en 400 km boven de aarde.
Dit is het nieuwste experiment in het METERON-project (Multi-Purpose End-to-End Robotic Operations Network) van meerdere ruimteagentschappen, onderzoeken hoe astronauten in een baan om robots toezicht kunnen houden op buitenaardse planeten, waardoor mensen onbekende omgevingen kunnen verkennen zonder het gevaar en de kosten van de landing.
Thomas Krueger van ESA van het Human Robot Interaction Lab van het Agentschap legt uit:"DLR's Rollin' Justin beschikt over een hoge mate van autonomie. Voor Alexander zal het meer zijn als het toezicht houden op Justin dan het uitvoeren van directe afstandsbediening.
"Hij zal zijn tablet op het ISS gebruiken om visueel te identificeren welke items de robot moet behandelen tussen een set zonnepanelen op een gesimuleerd Marsoppervlak. Het werkingsprincipe is vergelijkbaar met een point-and-click-avonturenspel, maar met exponentieel hogere inzet van ruimterobotica."
Hoofdonderzoeker voor het experiment is Neal Lii van DLR:"In plaats van elk gewricht en elke beweging van de robot te bevelen, die een hoge mentale belasting van de mens vraagt, we vertrouwen op de intelligentie van de robot om kleine taakpakketten uit te voeren onder bevel van de ISS-bemanning. Wat we met deze SUPVIS Justin-experimenten zoeken, is robots demonstreren als echte collega's, waar astronauten abstracte opdrachten geven die de robots lokaal kunnen berekenen en vervolgens uitvoeren. Ons model is gecontroleerde autonomie, met astronauten die een team van robots kunnen managen om een bepaald doel te bereiken.
"Dit wordt ons derde SUPVIS-Justin-orbitaalexperiment. Het eerste werd in augustus vorig jaar uitgevoerd met ESA-astronaut Paolo Nespoli. Paolo raakte er zo enthousiast over dat hij zelfs collega-bemanningsleden Randy Bresnik en Jack Fischer rekruteerde om het ook uit te proberen NASA-astronaut Scott Tingle nam deel aan de tweede sessie in maart 2018, ons van geweldige feedback te voorzien.
"We willen zien hoe we de interactie zo gemakkelijk en intuïtief mogelijk kunnen maken, terwijl de complexiteit van de taken wordt opgebouwd bij elk opeenvolgend ISS-grondexperiment. Beginnend met eenvoudiger in- en uitschakelen van taken, we zijn gevorderd tot het ophalen van activa, installatie, en handige reparaties voor deze sessie. Dit vertegenwoordigen enkele van de meest behendige telerobotische taken die tot nu toe vanuit de ruimte moeten worden uitgevoerd."
 Heet en gehinderd:hitte treft ons allemaal, maar ouderen lopen de grootste gezondheidsrisico's
Heet en gehinderd:hitte treft ons allemaal, maar ouderen lopen de grootste gezondheidsrisico's- Onderzoek voor een olie (palm) verandering
- Aloe Vera Science Experiments
- Culturele evolutie veroorzaakte grootschalige historische achteruitgang van grote zoogdieren in heel China
- Extremofiele microben gevonden in huishoudelijke boilers
Hoofdlijnen
- Geen toverstaf nodig:wetenschappers stellen een manier voor om elke cel in een ander celtype te veranderen
- Orgelsystemen betrokken bij homeostase
- Feiten over de Spleen
- Science Fair-projecten met nagellak
- Wat is de neurochemie van geluk?
- Hoe honden en katten hun dag in de rechtbank kunnen krijgen
- Tijgers klampen zich vast aan overleving in steeds meer gefragmenteerde bossen op Sumatras
- Hoe epigenetica werkt
- Hoe CFU uit verdunning te berekenen
- Nederlandse radioantenne vertrekt op Chinese missie naar de maan

- Anemische melkweg onthult tekortkomingen in ultra-diffuse melkwegvormingstheorie
- Afbeelding:Hubble vangt starbursts in een balkspiraalstelsel

- Video:Wat is ruimteweer?

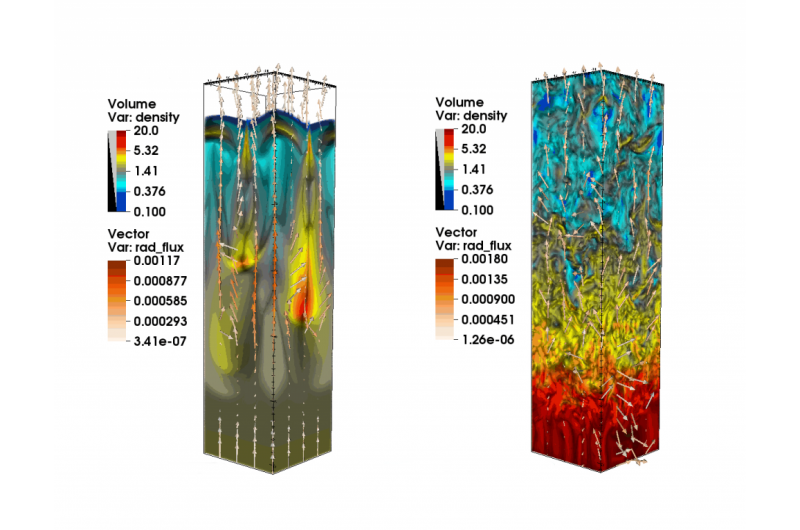
- Stellaire simulatoren:astrofysici zullen supercomputers gebruiken om de drijvende krachten achter massaverlies in massieve sterren te onderzoeken

 Kunstblad als minifabriek voor medicijnen
Kunstblad als minifabriek voor medicijnen- Hoe de straal van een boog te vinden
- Waarom verlaten dronepiloten het leger?
- Een kans voor de Pluto-huggers? Wetenschapper leidt inspanningen om de planetaire status van underdogs te herstellen
- Zelfherstellende elektroluminescente (EL) apparaten
- Theorie zou de push voor spintronische apparaten kunnen versnellen
- Kleiner door cellen zien:een natuurlijke eencellige biomagnifier voor beeldvorming onder de golflengte
- Bijna de helft van de wereld leeft van minder dan $ 5,50 per dag:Wereldbank
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
