Wetenschap
Autonome boten kunnen elkaar richten en vastklikken
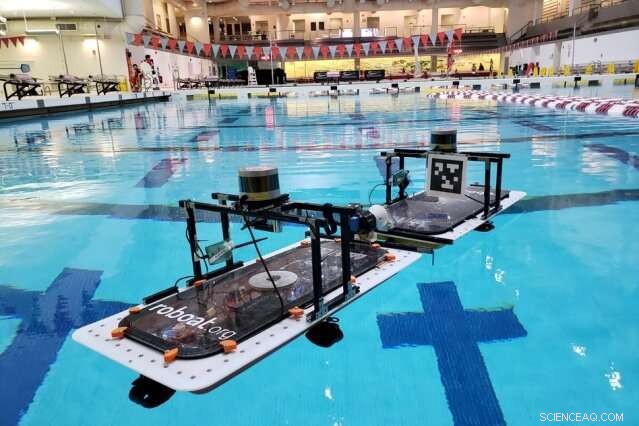
MIT-onderzoekers hebben hun vloot van autonome "roboats" de mogelijkheid gegeven om elkaar automatisch te richten en vast te grijpen - en blijven proberen als ze falen. De roboats worden ontworpen om mensen te vervoeren, afval verzamelen, en zelf assembleren tot drijvende constructies in de grachten van Amsterdam. Krediet:Massachusetts Institute of Technology
De stad Amsterdam ziet een toekomst voor zich waarin vloten van autonome boten over de vele kanalen varen om goederen en mensen te vervoeren, afval verzamelen, of zelf assembleren tot drijvende podia en bruggen. Om die visie te bevorderen, MIT-onderzoekers hebben nieuwe mogelijkheden gegeven aan hun vloot van robotboten - die worden ontwikkeld als onderdeel van een lopend project - waarmee ze elkaar kunnen richten en vastgrijpen, en blijf proberen als het niet lukt.
Ongeveer een kwart van de oppervlakte van Amsterdam bestaat uit water, met 165 grachten die langs drukke stadsstraten slingeren. Een aantal jaar geleden, MIT en het Amsterdam Institute for Advanced Metropolitan Solutions (AMS Institute) werkten samen aan het "Roboat"-project. Het idee is om een vloot van autonome robotboten te bouwen - rechthoekige rompen uitgerust met sensoren, stuwraketten, microcontrollers, GPS-modules, camera's, en andere hardware - die intelligente mobiliteit op het water biedt om opstoppingen in de drukke straten van de stad te verminderen.
Een van de doelstellingen van het project is het creëren van roboat-eenheden die on-demand transport over waterwegen bieden. Een ander doel is om de roboat-eenheden te gebruiken om automatisch "pop-up"-structuren te vormen, zoals loopbruggen, prestatie stadia, of zelfs voedselmarkten. De structuren zouden dan automatisch op gezette tijden kunnen worden gedemonteerd en omgevormd tot doelstructuren voor verschillende activiteiten. Aanvullend, de roboat-eenheden kunnen worden gebruikt als flexibele sensoren om gegevens te verzamelen over de infrastructuur van de stad, en lucht- en waterkwaliteit, onder andere.
in 2016, MIT-onderzoekers testten een prototype van een roboat die door de Amsterdamse grachten voer, vooruit gaan, achteruit, en lateraal langs een voorgeprogrammeerd pad. Vorig jaar, onderzoekers ontwierpen goedkope, 3D-geprint, kwartschaalversies van de boten, die efficiënter en wendbaarder waren, en was uitgerust met geavanceerde algoritmen voor het volgen van banen.
In een paper gepresenteerd op de International Conference on Robotics and Automation, de onderzoekers beschrijven roboat-eenheden die nu dockingstations kunnen identificeren en verbinden. Besturingsalgoritmen leiden de roboats naar het doel, waar ze automatisch tot op de millimeter nauwkeurig worden aangesloten op een op maat gemaakt vergrendelingsmechanisme. Bovendien, de roboat merkt of hij de aansluiting heeft gemist, maakt een back-up, en probeert het opnieuw.
De onderzoekers testten de vergrendelingstechniek in een zwembad bij MIT en in de Charles River, waar het water ruwer is. In beide gevallen, de roboat-eenheden waren meestal in staat om verbinding te maken in ongeveer 10 seconden, vanaf ongeveer 1 meter afstand, of ze slaagden na een paar mislukte pogingen. In Amsterdam, het systeem zou vooral handig kunnen zijn voor het 's nachts ophalen van afval. Roboat-eenheden konden rond een kanaal varen, lokaliseren en vastklikken op platforms met afvalcontainers, en breng ze terug naar de inzamelpunten.
"In Amsterdam, kanalen werden ooit gebruikt voor transport en andere dingen waar de wegen nu voor worden gebruikt. Wegen in de buurt van grachten zijn nu erg overbelast - en hebben lawaai en vervuiling - dus de stad wil meer functionaliteit toevoegen aan de grachten, " zegt eerste auteur Luis Mateos, een afgestudeerde student in het Department of Urban Studies and Planning (DUSP) en een onderzoeker in het MIT Senseable City Lab. "Zelfrijdende technologieën kunnen tijd besparen, kosten en energie, en de stad vooruit te helpen."
"Het doel is om roboat-eenheden te gebruiken om nieuwe mogelijkheden op het water tot leven te brengen, " voegt co-auteur Daniela Rus toe, directeur van het Computer Science and Artificial Intelligence Laboratory (CSAIL) en de Andrew en Erna Viterbi Professor of Electrical Engineering and Computer Science. "Het nieuwe vergrendelingsmechanisme is erg belangrijk voor het maken van pop-upstructuren. Roboat heeft geen vergrendeling nodig voor autonoom transport op het water, but you need the latching to create any structure, whether it's mobile or fixed."
Joining Mateos on the paper are:Wei Wang, a joint postdoc in CSAIL and the Senseable City Lab; Banti Gheneti, a graduate student in the Department of Electrical Engineering and Computer Science; Fabio Duarte, a DUSP and Senseable City Lab research scientist; and Carlo Ratti, director of the Senseable City Lab and a principal investigator and professor of the practice in DUSP.
Making the connection
Each roboat is equipped with latching mechanisms, including ball and socket components, on its front, rug, and sides. The ball component resembles a badminton shuttlecock—a cone-shaped, rubber body with a metal ball at the end. The socket component is a wide funnel that guides the ball component into a receptor. Inside the funnel, a laser beam acts like a security system that detects when the ball crosses into the receptor. That activates a mechanism with three arms that closes around and captures the ball, while also sending a feedback signal to both roboats that the connection is complete.
On the software side, the roboats run on custom computer vision and control techniques. Each roboat has a LIDAR system and camera, so they can autonomously move from point to point around the canals. Each docking station—typically an unmoving roboat—has a sheet of paper imprinted with an augmented reality tag, called an AprilTag, which resembles a simplified QR code. Commonly used for robotic applications, AprilTags enable robots to detect and compute their precise 3-D position and orientation relative to the tag.
Both the AprilTags and cameras are located in the same locations in center of the roboats. When a traveling roboat is roughly one or two meters away from the stationary AprilTag, the roboat calculates its position and orientation to the tag. Typisch, this would generate a 3-D map for boat motion, including roll, pitch, and yaw (left and right). But an algorithm strips away everything except yaw. This produces an easy-to-compute 2-D plane that measures the roboat camera's distance away and distance left and right of the tag. Met behulp van die informatie, the roboat steers itself toward the tag. By keeping the camera and tag perfectly aligned, the roboat is able to precisely connect.
The funnel compensates for any misalignment in the roboat's pitch (rocking up and down) and heave (vertical up and down), as canal waves are relatively small. Indien, echter, the roboat goes beyond its calculated distance, and doesn't receive a feedback signal from the laser beam, it knows it has missed. "In challenging waters, sometimes roboat units at the current one-quarter scale, are not strong enough to overcome wind gusts or heavy water currents, " Mateos says. "A logic component on the roboat says, "You missed, so back up, recalculate your position, and try again.""
Future iterations
The researchers are now designing roboat units roughly four times the size of the current iterations, so they'll be more stable on water. Mateos is also working on an update to the funnel that includes tentacle-like rubber grippers that tighten around the pin—like a squid grasping its prey. That could help give the roboat units more control when, zeggen, they're towing platforms or other roboats through narrow canals.
In the works is also a system that displays the AprilTags on an LCD monitor that changes codes to signal multiple roboat units to assemble in a given order. Aanvankelijk, all roboat units will be given a code to stay exactly a meter apart. Vervolgens, the code changes to direct the first roboat to latch. After, the screen switches codes to order the next roboat to latch, enzovoort. "It's like the telephone game. The changing code passes a message to one roboat at a time, and that message tells them what to do, " Mateos says.
Darwin Caldwell, the research director of Advanced Robotics at the Italian Institute of Technology, envisions even more possible applications for the autonomous latching capability. "I can certainly see this type of autonomous docking being of use in many areas of robotic refueling and docking … beyond aquatic/naval systems, " hij zegt, "including inflight refueling, space docking, cargo container handling, [and] robot in-house recharging."
Dit verhaal is opnieuw gepubliceerd met dank aan MIT News (web.mit.edu/newsoffice/), een populaire site met nieuws over MIT-onderzoek, innovatie en onderwijs.
 Sensorpatch van textiel gemaakt met geleidende garens kan drukpunten voor geamputeerden detecteren
Sensorpatch van textiel gemaakt met geleidende garens kan drukpunten voor geamputeerden detecteren- Nieuw polymeermateriaal kan ervoor zorgen dat batterijen zelfherstellend worden, recyclebaar
- Een theorie zo helder als glas
- Verdere kennis nodig over de verschillen tussen melkeiwitten
- Hoe equivalente eenheden te berekenen
- Waarom het voorspellen van het weer en klimaat nog moeilijker is voor de regenachtige noorderburen van Australië
- Wetenschappers lossen mysterie van onverklaarbare heldere nachten op
- Californiërs hard getroffen door weekend vol angst voor bosbranden
- Hoop op herstel van koraal kan afhangen van goed ouderschap
- 2017 al gekenmerkt door klimaatextremen:UN
Hoofdlijnen
- Commerciële voorouderstests kunnen onthullen hoeveel Neanderthaler-DNA u heeft
- Wat zijn de niveaus van organisatie in de biologie?
- Voorbeelden van sensorische adaptatie
- Doden lindebomen bijen?
- 25 soorten onthuld voor 25 Genomes Project
- Plantverdediging volgens het iron-maiden-principe
- Waarom is fotosynthese belangrijk voor mensen?
- De vreemde empathie van plaatsvervangende schaamte
- Wat is het oudste levende wezen op aarde?
- Wetenschappers vinden een manier om brandstofcellen beter te laten werken blijf schoon in de kou

- Hoe wegen te financieren en ervoor te zorgen dat elektrische voertuigen hun deel betalen?

- Geavanceerd onderwatermijnsysteem kan ondergelopen mijnen een nieuw leven geven

- Het systeem helpt planners bij het identificeren, prioriteit geven aan snelwegprojecten

- Introductie van hoogwaardige niet-fullereen organische zonnecellen


 Glycolyse: definitie, stappen, producten en reactanten
Glycolyse: definitie, stappen, producten en reactanten - Amerikaanse economie om uit te breiden, maar in een langzamer tempo, bereiken van ongeveer 2% groei in 2020:economie
- Laat DNA de cellen weten wat eiwitten moeten maken?
- Coronavirus:Strategische Nationale Voorraad was klaar, maar niet hiervoor
- Rusland schuwt het Amerikaanse maanprogramma terwijl de samenwerking in de ruimte wordt bedreigd
- NGO's verwerpen plan van VN-luchtvaartagentschap voor biobrandstoffen
- De aarde had zojuist de heetste september ooit
- Hoe werkgevers sociale mobiliteit kunnen stimuleren door de manier waarop ze rekruteren te veranderen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
