Wetenschap
Vormgecodeerde dynamische assemblage van mobiele micromachines
Vormgecodeerde assemblage van magnetische microactuators in de vorm van een microvoertuig. Krediet:natuurmaterialen, doi:10.1038/s41563-019-0407-3
Veldgerichte en zelfrijdende colloïdale assemblage kan worden gebruikt om micromachines te bouwen om complexe bewegingen en functies uit te voeren, hoewel hun integratie als heterogene componenten met gespecificeerde structuren, dynamiek en functies binnen micromachines is een uitdaging. In een recente studie over Natuurmaterialen , Yunus Alapan en medewerkers van de afdelingen fysieke intelligentie en complexe materialen in Duitsland en Zwitserland beschreven de dynamische zelfassemblage van mobiele micromachines met gewenste configuraties met behulp van voorgeprogrammeerde fysieke interacties tussen structurele en motorische eenheden.
Ze dreven de assemblage aan met behulp van diëlektroforetische interacties (DEP) gecodeerd in een driedimensionale vorm (3-D) van afzonderlijke onderdelen. Ze volgden het protocol door de nieuwe micromachines te assembleren met magnetische en zelfrijdende motoronderdelen voor herconfigureerbare voortbeweging en extra vrijheidsgraden die tot nu toe niet werden gerealiseerd met conventionele monolithische microrobots. De site-selectieve assemblagestrategie was veelzijdig en kon worden gedemonstreerd op verschillende, herconfigureerbaar, hiërarchische en driedimensionale (3D) mobiele micromachines. De wetenschappers anticiperen op de ontwerpprincipes die in het werk worden gepresenteerd om de ontwikkeling van meer geavanceerde micromachines te bevorderen en te inspireren die zijn geïntegreerd in hiërarchische systemen met meerdere schalen.
Mobiele micromachines bieden een aanzienlijk potentieel om de microscopische wereld te onderzoeken en te manipuleren en om functionele ordening/assemblages te creëren op micro- en mesoschaal. Een micromachine kan uit meerdere onderdelen bestaan, materialen of chemicaliën om meerdere functies aan te pakken, inclusief bediening, voelen, transport en levering. Functionele modi en prestaties van een micromachine kunnen worden bepaald door de collectieve organisatie en interactie van de onderdelen ervan.
Bijvoorbeeld, magnetische deeltjes die interageren onder roterende magnetische velden, kunnen samenkomen in kettingen of wielen die dicht bij vaste oppervlakken kunnen bewegen. evenzo, wetenschappers hebben door licht geactiveerde microzwemmers ontwikkeld in levende kristallen en hebben zelfrotatie mogelijk gemaakt door het chemicaliënverbruik te reguleren. Om een hogere complexiteit te ontwerpen, bio-ingenieurs en materiaalwetenschappers moeten programmeerbare fysieke interacties in afzonderlijke onderdelen mogelijk maken voor vorm- en materiaalspecifieke acties onder externe invloeden. Voorbeelden hiervan zijn de ontwikkeling van samengestelde microstructuren die zijn samengesteld als colloïden met behulp van virtuele elektrische en magnetische mallen.
Hoewel nieuwe benaderingen veelbelovend zijn gebleken om programmeerbare structurele assemblages te bouwen, deze moeten nog worden vertaald in mobiele micromachine-assemblages. In het huidige werk, Alapan et al. introduceerde een gericht assemblageproces om mobiele samengestelde micromachines te bouwen met behulp van diëlektroforetische (DEP) krachten om een nauwkeurig gecontroleerde verdeling van elektrische veldgradiënten rond een lichaam te coderen door de 3D-geometrie te moduleren.
De resultaten toonden locatieselectieve en directionele microactuatoren met een veelzijdige vormgecodeerde assemblagestrategie. Ze toonden de mogelijkheid van verbeterde versterking tussen de actuatoren en het lichaam door de DEP-krachten af te stemmen om controle over rotatie te bieden. Alapan et al. implementeerde een nieuwe ontwerpstrategie van gerichte assemblage om de operationele dynamiek tussen functionele componenten te regelen met behulp van vormgecodeerde DEP-krachten. Het experimentele werk zal een rijke ontwerpruimte bieden om functionele micromachines en mobiele microbots te ontwikkelen om complexe taken uit te voeren.
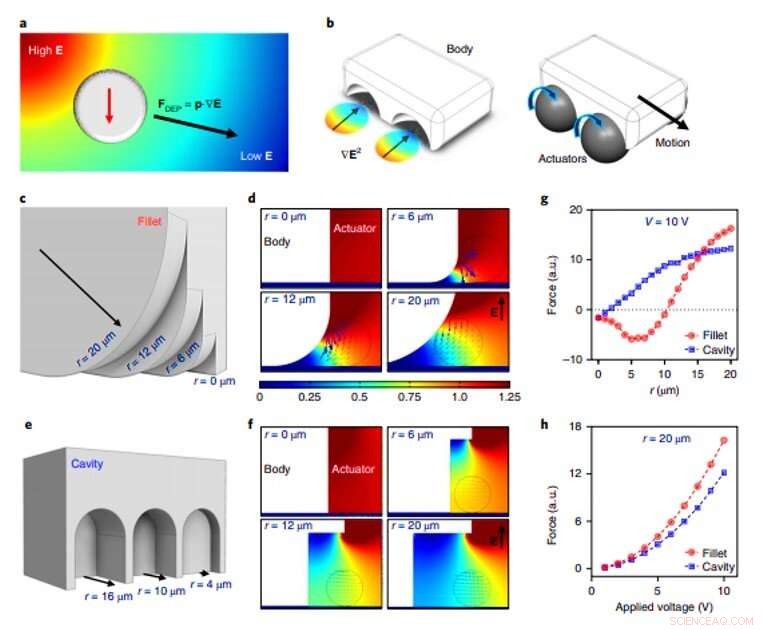
Ruimtelijke codering van DEP-attractiesites door de 3D-geometrie te moduleren. (een), Een negatief gepolariseerd deeltje, met een lagere relatieve permittiviteit dan het medium (εp<εm) ervaart een DEP-kracht naar de lagere veldmagnitudes onder een niet-uniform elektrisch veld. (B), DEP-krachten kunnen worden benut voor de gecodeerde assemblage van functionele componenten door lokale elektrische veldgradiënten te regelen die rond een lichaam worden gegenereerd via de geometrie ervan. (c-f), Verschillende 3D oppervlakteprofielen (filet of holte) van een vast lichaam veranderen de elektrische veldsterkte rond het lichaam (c, e), het creëren van lokale gradiënten rond de oppervlakteprofielen, afhankelijk van de kenmerkdimensie, r (d, F). Pijlen vertegenwoordigen elektrische veldgradiënten binnen het cirkelvormige gebied dat een microactuator vertegenwoordigt (10 m diameter), die zich op het punt van maximale kracht bevindt. Kleurenbalk genormaliseerde elektrische veldsterkte (E/E0)2. (G, H), Negatief gepolariseerde kleinere actuatoren ervaren een DEP-kracht naar (F> 0) of weg (F<0) van de inspringing vanwege de veldgradiënt rond het oppervlakteprofiel. De grootte en richting van de DEP-kracht zijn afhankelijk van het profieltype en de kenmerkgrootte (g), evenals de aangelegde spanning (h). Krediet:natuurmaterialen, doi:10.1038/s41563-019-0407-3
Alapan et al. programmeerde eerst de veldgradiënten rond een constructie om de assemblage van micromachine-onderdelen op gewenste locaties aan te drijven met behulp van DEP-interacties. Het werkingsprincipe van het apparaat onder elektrische velden was gebaseerd op de vormafhankelijke regeling van elektrische velden rond polariseerbare lichamen van de geassembleerde micromachine. Om de lokale hellingen te programmeren, ze onderzochten hoe niet-elektrische velden gemoduleerd konden worden rond verschillende geometrieën.
De wetenschappers demonstreerden vervolgens gecontroleerde zelfassemblage van mobiele micromachines beïnvloed door elektrische velden, waar ze zich eerst richtten op de assemblage van een eenvoudig microvoertuig. Het experimentele microvoertuig bevatte een groot niet-magnetisch diëlektrisch bolvormig lichaam en meerdere kleinere magnetische microactuators die rond het grotere lichaam waren georganiseerd. Toen ze een elektrisch veld in de Z-as aanbrachten, het niet-magnetische lichaam genereerde lokale elektrische veldgradiënten om kleinere microactuators rond zijn polen aan te trekken. De nieuw geassembleerde magnetische actuators dienden als aandrijfwielen en Alapan et al. zou het microvoertuig kunnen sturen door de richting van het magnetische veld te veranderen door een verticaal roterend magnetisch veld aan te leggen.
Terwijl ze de snelheid van het microvoertuig verhoogden door het aantal microactuators te vergroten, toen de spanning in het systeem toenam, nam de snelheid van het microvoertuig af. De wetenschappers veronderstelden dat dit te wijten was aan een verhoogde mechanische koppeling tussen de microdeeltjes en het substraat tijdens DEP-interacties. De onderzoekers gebruikten de methode om willekeurig verdeelde, niet-magnetische deeltjes met magnetische microactuators door een elektrisch veld aan te leggen, vertaalde ze vervolgens naar een nieuwe positie met behulp van een roterend magnetisch veld voor vrijgave bij het uitschakelen van het elektrische veld.
Assemblage en vertaling van een samengesteld microvoertuig met magnetische actuatoren. Krediet:natuurmaterialen, doi:10.1038/s41563-019-0407-3
Om de rotatievrijheidsgraden van het microvoertuig te regelen, Alapan et al. zou de sterkte van de aantrekkende DEP-krachten tussen het passieve lichaam en microactuators kunnen reguleren om hun mechanische koppeling af te stemmen. Bijvoorbeeld, bij lage spanningen, de kleine aantrekkelijke DEP-krachten leidden tot een los, op smering gebaseerd koppelingsfenomeen waardoor microactuators vrij rond de paal konden bewegen. De roterende gewrichten die in het onderzoek zijn ontwikkeld, kunnen cruciaal worden voor specifieke biologische systemen tijdens de ontwikkeling van synthetische moleculaire, nano- en micromachines voor toepassing bij mechanische energieoverdracht.
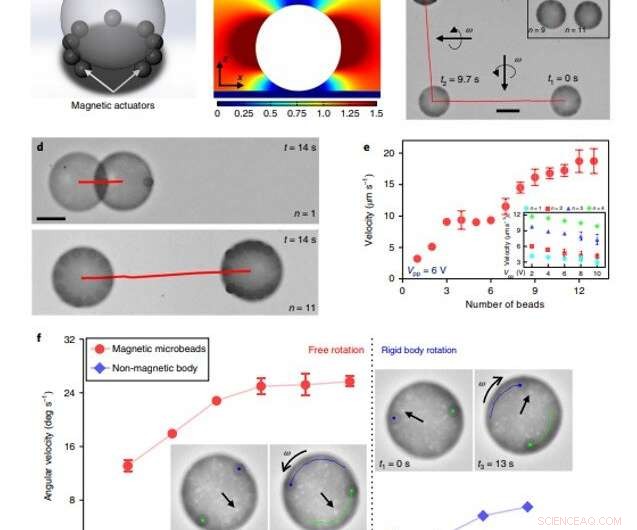
Omkeerbare montage van magnetische microactuators met een niet-magnetisch lichaam met behulp van DEP-krachten. (een, B), Verschillende magnetische microdeeltjes (10 m diameter) kunnen worden aangetrokken nabij een bolvormig niet-magnetisch lichaam (60 m diameter) (a) naar gebieden met een lagere elektrische veldsterkte rond de polen (b). Kleurenbalk genormaliseerde elektrische veldsterkte (E/E0)2. (C), De geassembleerde microrobot vertaalt zich via rollende beweging van de microactuators onder een roterend magnetisch veld (ω). De microrobot kan worden bestuurd door de richting van het aangelegde magnetische veld te veranderen. Schaalbalk, 50 µm. inzet, het aantal magnetische microactuators (n) dat rond het lichaam is gemonteerd, kan worden afgestemd door de gecontroleerde opname van microactuators. (NS, e), Het aantal magnetische microactuators, evenals de aangelegde spanning (inzet), bepaal de snelheid van de geassembleerde microrobots. Schaalbalk in d, 30 µm. (F), Wanneer een roterend magnetisch veld in het x-y-vlak wordt aangelegd, actuatoren draaien vrij rond het niet-magnetische lichaam bij lage spanningen. Met verhoogde spanning, actuatoren koppelen mechanisch aan het niet-magnetische lichaam, wat resulteert in de starre lichaamsrotatie van de microrobot. Foutbalken geven sd aan. van drie experimentele replica's. Krediet:natuurmaterialen, doi:10.1038/s41563-019-0407-3
De onderzoekers realiseerden vervolgens programmeerbare zelfassemblage van mobiele micromachines met vormgecodeerde fysieke interacties door micromachineframes te ontwerpen met specifieke 3D-geometrieën om elektrische veldgradiënten te genereren. Het 3D-raamwerk trok selectief micro-actuatoren naar de gewenste locaties op het frame van de micromachine zelf die de wetenschappers hebben gefabriceerd met behulp van twee-fotonlithografie. Voor het eerste ontwerp de wetenschappers creëerden een microcar met vierwielzakken om DEP-krachten te genereren en de montage van magnetische microactuators in de zakken te leiden. Ze voerden on-demand zelfassemblage van de microcar uit binnen enkele seconden na het aanleggen van een elektrisch veld voor vrije rotatie van magnetische wielen in de zakken als gevolg van een verticaal roterend magnetisch veld. Toen ze het elektrische veld op een hoge waarde zetten, de magnetische micro-actuatoren zijn zelf-geassembleerd in de docking-sites voor een stevige koppeling tussen het micro-rotorframe en magnetische micro-actuatoren. Toen ze een horizontaal roterend magnetisch veld aanbrachten, het micromotorsamenstel draaide als een stijf lichaam.
De wetenschappers breidden het prototype uit om herconfigureerbare micromachines te bouwen die worden aangedreven door zelfrijdende micromotoren. Voor deze, ze ontwierpen micromachines geassembleerd met zelfrijdende Janus silica (SiO 2 ) microdeeltjes met een gouden dop (Au). Dankzij de frequentieafhankelijke zelfaandrijving en de DEP-respons van de Janus-microdeeltjes konden ze mobiele micromachines ontwerpen met een herconfigureerbare ruimtelijke organisatie en kinematica. Deze experimentele opstelling demonstreerde ook een vorm van zelfreparatie.

RECHTS:Vormgecodeerde herconfigureerbare assemblage van micromachines met zelfrijdende microactuators voor frequentie-afstembare voortbeweging. (een), Janus SiO2-microdeeltjes met een Au-kap kunnen actief voortbewegen op basis van sDEP bij hoge frequenties en ICEP bij lage frequenties. De voortbewegingsrichting is in de richting van de Au-cap in sDEP en omgekeerd in ICEP. (B), Het Janus-deeltje ervaart een DEP-kracht naar hogere en lagere elektrische veldsterkten bij hoge en lage frequenties, respectievelijk. (c–e), Een microcar-carrosserie met halfcilindrische en gefileerde montageplaatsen is ontworpen om frequentie-afstembare selectieve aantrekking van microactuators te genereren. De Janus-deeltjes worden aangetrokken naar de equatoriale lijn van de halve cilinders bij hoge frequenties en naar de gefileerde plaats bij lage frequenties. Kleurenbalk genormaliseerde elektrische veldsterkte (E/E0)2. De voortstuwing van Janus-deeltjes geassembleerd op de halfcilindrische plaatsen resulteert in rotatie van het microcar-lichaam, terwijl assemblage op de gefileerde site lineaire translatie genereert. F, G, On-demand herconfiguratie van de voortbewegingsmodus wordt bereikt door de frequentie af te stemmen en de ruimtelijke indeling van de assemblage te reorganiseren. Schaalbalken, 25 µm. LINKS:Hiërarchische assemblage van meerdere micromachines via vormgecodeerde DEP-interacties. (a-c), Hiërarchische assemblage in twee stappen vindt plaats door de assemblage van micromachine-eenheden 1 en 2 met zelfrijdende Janus-deeltjes (i) en door de laterale assemblage van unit 1 en unit 2 (ii). Micromachine-eenheden zijn ontworpen voor selectieve laterale montage, waar onderkanten van richels in de grotere eenheid 2 lage elektrische velden genereren die de kleinere eenheid 1 aantrekken. Kleurenbalk genormaliseerde elektrische veldsterkte (E/E0)2. (NS, e), Parallelle montage van mobiele micromachines handhaaft de lineaire beweging van de eenheden, terwijl anti-parallelle montage resulteert in roterende beweging. Schaalbalken, 25 µm. Krediet:natuurmaterialen, doi:10.1038/s41563-019-0407-3
Alapan et al. breidde de waargenomen vormgecodeerde DEP-interacties uit om fysieke interacties tussen de mobiele micromachines te definiëren door de weg vrij te maken voor hiërarchische multi-machine-assemblages. Als bewijs van principe, ze ontwierpen een hiërarchische assemblage op twee niveaus tussen de samenstellende micromachines.
- Op het eerste niveau; zelfrijdende actuatoren geassembleerd met twee microstructuureenheden om mobiele micromachines te vormen die lineair vertaalden
- Op het tweede niveau; de tweede unit zijdelings geassembleerd met unit 1 vanwege het genereren van lage elektrische velden
De wetenschappers breidden het in het huidige werk geïntroduceerde ontwerp uit tot 3D-manipulatie van micro-actuatoren en de assemblage van micromachines met een aanzienlijk potentieel voor toepassing op lab-on-a-chip-apparaten om continu transport te vergemakkelijken, sorteren, digitale manipulatie van micro-objecten en het genereren van microfluïdische stroming. Op deze manier, Yunus Alapan en collega's ontwierpen en implementeerden programmeerbare zelfassemblage met behulp van vormgestuurde dynamische assemblage van micromachines van modulaire structurele en motorische subeenheden om ongekende controle over dynamiek en functies te bieden. De methode kan een oplossing bieden voor het engineeren van multifunctionele / materiële microrobots, aangezien de wetenschappers erin zijn geslaagd om de heterogene componenten voor detectie, lading laden en bedienen samen in één stap.
Voor toepassingen zonder elektrische velden zoals in vivo biomedische toepassingen, de wetenschappers zullen streven naar het optimaliseren van en voortbouwen op de onomkeerbare assemblage van microcomponenten voor geoptimaliseerde prestaties. Het werk heeft een aanzienlijk potentieel om multifunctionele, herconfigureerbare micromachines en levensgeïnspireerde complexe hiërarchische systemen in materiaalkunde voor toepassingen in microrobotica, colloïdale wetenschap, geneeskunde en autonome microsystemen.
© 2019 Wetenschap X Netwerk
 Gassen gebruikt in neonborden
Gassen gebruikt in neonborden - Video:Hoe lood (misschien) de ondergang van het oude Rome veroorzaakte
- Carbonaatstandaarden zorgen voor betere paleothermometers
- Verbeterde osteogene activiteit van pre-osteoblasten op aan het oppervlak gemodificeerde 3D-geprinte steigers
- Kleine microplastics glippen niet meer door de kieren met nieuwe detectiemethode
- China's Belt and Road-risico's Klimaatdoelen van Parijs:analyse
- NASA-infraroodgegevens analyseren wolkentoptemperaturen in tropische cycloon Claudia
- Wat is de Tree Equity-score van uw stad?
- Portugal, een land dat hulpeloos vatbaar is voor bosbranden
- Het veiligstellen van de natuurlijke koolstofopslag in het VK
Hoofdlijnen
- Rollende dobbelstenen voor specificatie van celgrootte in epidermis van planten
- Angiospermen: definitie, levenscyclus, soorten en voorbeelden
- Wanneer wordt een mutatie in een DNA-molecuul doorgegeven aan nakomelingen?
- Hoe een celvorm zijn functie beïnvloedt
- Bacteriën als pacemaker voor de darm
- Een konijn ontleden
- Team ontdekt nieuwe mechanismen voor DNA-stabiliteit
- Wat zijn de stadia van de celcyclus?
- Hoeveel Valence-elektronen heeft natrium?
- Onderzoekers leveren bewijs bij mensen van RNA-interferentie met behulp van gerichte nanodeeltjes

- Nanodeeltjes gebruiken om arteriosclerose te bestrijden

- Het meten van de temperatuur van tweedimensionale materialen op atomair niveau
- Een microlab op een chip detecteert bloedgroep binnen enkele minuten
- Onderzoekers oogsten snel 2D-materialen, ze dichter bij commercialisering brengen

 Alpha Magnetic Spectrometer-metingen onthullen eigenschappen van kosmisch helium
Alpha Magnetic Spectrometer-metingen onthullen eigenschappen van kosmisch helium- Persoonlijke en sociale factoren beïnvloeden de terugkeer naar het werk na een slechte gezondheid
- Amerikaans debat over internetaansprakelijkheid slaat over op wereldwijde handelsovereenkomsten
- Romeins theater ontdekt aan de voet van de Westelijke Muur van Jeruzalem
- Vloeibaar nanofoam:een game-wisselaar voor toekomstige voetbalhelmen
- Halfgeleider shish kabob nanostructuren combineren eigenschappen van verschillende dimensies
- Hoe Brexit het klimaatbeleid van het VK ten goede kan komen
- Microben die samenwerken vermenigvuldigen de conversiemogelijkheden van biomassa
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
