Wetenschap
Eerste proefvaarten van een revolutionaire nieuwe onderzeese robot
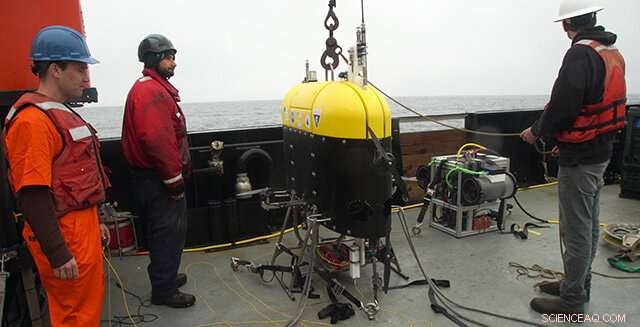
Ingenieurs van Woods Hole Oceanographic Institution en de scheepsbemanning van de R/V Rachel Carson bereiden zich voor om de Mesobot in Monterey Bay te lanceren. MBARI's "SmartClump" bevindt zich op de achtergrond, in afwachting van inzet. Krediet:Erik Olsen/WHOI
Eind juni voegden onderzoekers van MBARI zich bij ingenieurs van Woods Hole Oceanographic Institution (WHOI) om een nieuw soort onderzeese robot te testen die is ontworpen om nieuwe wegen voor onderzoek in de mesopelagische, ook bekend als de schemerzone van de oceaan. Dit voertuig, de Mesobot, is ontstaan bij WHOI en is de afgelopen twee jaar ontwikkeld met kritische inbreng van wetenschappers en ingenieurs van MBARI, Stanford universiteit, en de Universiteit van Texas Rio Grande Valley. Mesobot is speciaal ontworpen om zwemmende en ronddrijvende dieren te volgen en te bestuderen tot wel 1, 000 meter (3, 300 voet) onder het oppervlak gedurende maximaal 24 uur aan een stuk.
De Mesobot zal eerdere midwater-werkzaamheden van MBARI en andere instellingen uitbreiden en versterken. Al decenia, MBARI-onderzoekers onder leiding van Bruce Robison en Steve Haddock en anderen hebben op afstand bediende voertuigen (ROV's) gebruikt om dergelijke midwaterdieren te bestuderen. Hoewel zelden gezien, deze wezens ondersteunen belangrijke visserijen zoals tonijn en zwaardvis, zorgen voor voedsel voor andere grote dieren zoals haaien en walvissen, en helpen het klimaat op aarde te reguleren door koolstof van het oppervlak naar diepe wateren te verplaatsen.
Het project wordt gefinancierd door de National Science Foundation, WIE, MBARI, en het Audacious Project ondergebracht bij TED.
Het multi-institutionele team ontwierp de Mesobot om minder storend te zijn voor diepzeedieren dan de meeste ROV's, het uitrusten met 4K-camera's bij weinig licht, rode lichten die minder zichtbaar zijn voor dieren in de mesopelagische, en groot, langzaam draaiende propellers die verstoringen in het water minimaliseren. Met geavanceerde computersoftware kan het voertuig dieren of objecten onder water tot 24 uur per keer volgen terwijl ze hun dagelijkse verticale migratie doorlopen.

Deze foto toont de Mesobot die een gesimuleerd zeedier volgt (wit object aan een touwtje) in de testtank van MBARI. Krediet:WHOI/ Erik Olsen
De Mesobot is een hybride tussen een ROV, die wordt aangedreven en bestuurd met behulp van een ketting die aan een oppervlakteschip is bevestigd, en een autonoom onderwatervoertuig (AUV), die aan de oppervlakte is geprogrammeerd en onder water zonder menselijke tussenkomst werkt.
Aan het begin van elke duik, operators besturen Mesobot vanaf het oppervlak als een ROV, met behulp van een dunne glasvezelkabel. De onderzoekers laten dan de ketting los en spoelen hem terug op het schip, terwijl de robot zelfstandig doorgaat als AUV.
MBARI-medewerkers zijn bij verschillende aspecten van het project betrokken. Hoofdingenieur Kakani Katija, Senior wetenschapper Bruce Robison, en mechanisch ingenieur Brett Hobson waren betrokken bij het conceptuele ontwerp van het voertuig. Het hoofdcomputersysteem van het voertuig is gebaseerd op een ontwerp dat is ontwikkeld voor MBARI's langeafstands-AUV. Het diervolgsysteem wordt ontworpen door Software Engineer Mike Risi, samen met Katija en MBARI Adjunct en Stanford University Professor Steve Rock, gebaseerd op een systeem dat al is getest op verschillende MBARI ROV's.
Tijdens het recente veldprogramma de ingenieurs van het team hebben de Mesobot in elkaar gezet en getest in MBARI's enorme indoor zoutwatertesttank. Na te hebben bevestigd dat het voertuig naar behoren werkte, ze namen het mee naar zee op MBARI's onderzoeksschip Rachel Carson voor drie dagen veldtesten in open water in Monterey Bay.

Lancering van de Mesobot vanaf het dek van MBARI's onderzoeksschip Rachel Carson. Krediet:WHOI/ Erik Olsen
Tijdens de veldproeven de Mesobot maakte vijf duiken, elk enkele honderden meters onder het oppervlak. Deze tests hielpen de ontwerpers om voertuigsystemen te testen onder reële omstandigheden en om hun methoden te verfijnen om het voertuig vanaf de zijkant van een rollend schip te lanceren. Het beheren van de dunne ketting bood een bijzonder, maar verwacht, uitdaging. "De reeks wetenschappelijke instrumenten aan boord van de Rachel Carson en de deskundige scheepsbehandeling en het dekwerk waren cruciaal voor ons succes, " zei Mesobot-ontwerper en hoofdingenieur Dana Yoerger.
Om het voertuig en zijn koord in de gaten te houden, het team gebruikte MBARI's "SmartClump, " een verzwaarde bundel sensoren en camera's die aan een ketting zijn bevestigd. Dit geeft piloten en wetenschappers een overheadperspectief dat onderwateroperaties veiliger en efficiënter maakt.
Uiteindelijk hopen de onderzoekers de Mesobot te gebruiken om een dag lang onderzoek te doen naar individuele dieren of groepen dieren terwijl ze deelnemen aan "dagelijkse verticale migratie" - de grootste dierenmigratie op aarde. Veel zeedieren (waaronder delicate, zachte gelei) migreren honderden meters naar het oceaanoppervlak in de schemering en dalen dan weer af in de diepte bij zonsopgang. Dit fenomeen wordt nog steeds slecht begrepen. De onderzoekers hopen dat de Mesobot individuele dieren tijdens hun migratie kan volgen om meer te weten te komen over hoe en waarom ze deze inspannende dagelijkse reis ondergaan.
 Vanuatu beveelt evacuatie van eiland met rommelende vulkaan
Vanuatu beveelt evacuatie van eiland met rommelende vulkaan- Hoe klimaatverandering emigratie uit Midden-Amerika stimuleert
- Het omzetten van voedselafval in diervoeder kan een deel van de uitstoot van vee wegnemen
- Twijfel over de ware hoogte van Everest stimuleert nieuwe expeditie
- Animal Behaviour Science Fair Projectideeën
Hoofdlijnen
- Een universele voedsel- en alarmsignaal gevonden in zoogdierbloed
- De nadelen van Western Blotting
- Ocean meeting haalt meer dan $7 miljard op voor mariene bescherming
- Wat zijn de functies van mRNA & tRNA?
- Waarom bevatten de testen veel glad ER?
- Verschillende soorten cellulaire communicatie
- Wanneer gebeurt er wanneer mitose verkeerd gaat en in welke fase zal het verkeerd gaan?
- Gel elektroforese lezen
- Het verschil tussen genomisch DNA en plasmide DNA
- Matige tot sterke La Nina dit jaar:UN

- Onderzoekers ontdekken aanvullend bewijs voor enorme zonnestormen
- Beperk klimaatverandering op een gemakkelijke manier:hak geen grote bomen om

- Een ethicus weegt mee op ons morele falen om op te treden tegen klimaatverandering

- 3 redenen waarom het afvangen en opslaan van koolstof onnodig is vastgelopen

 Gletsjersmelt om Alaskas Alsek-rivier om te leiden, wereldberoemde raftingroute in gevaar brengen
Gletsjersmelt om Alaskas Alsek-rivier om te leiden, wereldberoemde raftingroute in gevaar brengen- Het bestuderen van de impact van onderzeese vulkanen op de biologische activiteit in de oceaan
- Een gecombineerde invloed van drie oceanen op recordbrekende regenval boven China in juni 2020
- Doemdenken over nieuwe technologie helpt het beter te maken
- Een nieuw permafrostgasmysterie
- Uber levert tientallen miljoenen maskers in virusveiligheidsmaatregel
- Andromedas heldere röntgenmysterie opgelost door NuSTAR
- UFO's:hoe bereken je de kans dat een buitenaards ruimteschip is gespot?
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
