Wetenschap
Team onderzoekt collectieve aansturing van een elastisch netwerk van minirobots
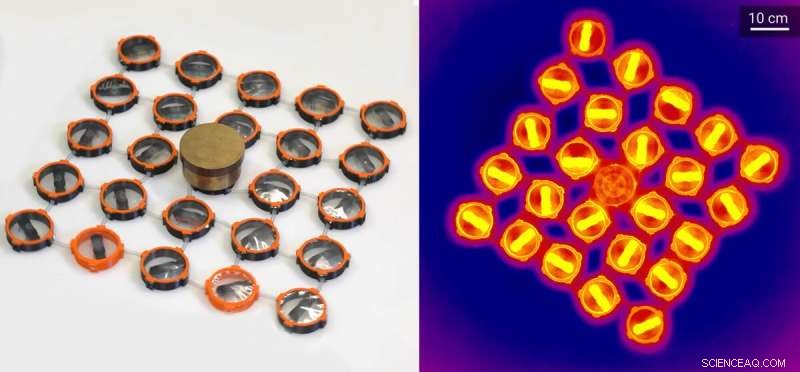
Collectieve bediening binnenin een elastisch netwerk van hexbugs. Krediet:ESPCI Parijs
De fysica van collectieve beweging is de afgelopen dertig jaar goed bestudeerd. Tot nu toe hebben wetenschappers zich gericht op de studie van "vloeibare" bewegingen, zoals die van zwermen vogels of scholen vissen. Nu hebben onderzoekers van het Gulliver-laboratorium (ESPCI Paris-PSL / CNRS) met behulp van een ingenieus experimenteel apparaat de mogelijkheid van collectieve bewegingen in elastische vaste structuren onthuld. Hun werk werpt licht op het mechanisme en de parameters die deze zogenaamde 'collectieve aandrijving' besturen. Dit werk is gepubliceerd in het tijdschrift Nature Physics .
Binnen het Gulliver-laboratorium bestudeert het team van Olivier Dauchot, een CNRS-onderzoeker, al enkele jaren collectieve bewegingen. Het concentreerde zich aanvankelijk op een eenvoudige vraag:hoe reproduceren we in het laboratorium de collectieve bewegingen die in de natuur worden waargenomen, zoals die van vogels of vissen? Om dit te doen, zette het team experimenten op met 'actieve materie', d.w.z. materie waarvan de elementaire entiteiten autonoom bewegen:lopende granen, zwemdruppels, minirobots - een ware dierentuin van actieve (maar niet levende) systemen, waarmee ze in staat waren om collectieve bewegingen te reproduceren en te bestuderen. Onlangs heeft hun onderzoek zich gericht op het fenomeen van files wanneer het systeem dichter wordt. Van vloeistof wordt het systeem geleidelijk vast. Is collectieve beweging mogelijk binnen een actieve vaste stof?
Eenvoudige ingrediënten om een ingewikkeld systeem te begrijpen
"Als actieve deeltjes hebben we gekozen voor Hexbugs. Dit zijn kleine gemotoriseerde robots, die je in winkels kunt vinden. Als stevig elastisch materiaal hebben we een netwerk van cilinders gemaakt die door veren aan elkaar zijn verbonden. Door in elk van de cilinders een Hexbug te plaatsen die het netwerk vormen, vormen we een actieve vaste stof", legt Paul Baconnier uit, die zijn scriptie over dit onderwerp aan het maken is. Elke Hexbug vervormt het netwerk door te proberen te bewegen, terwijl hij wordt onderworpen aan de verplaatsingen die worden veroorzaakt door de inspanningen van zijn buren. Opmerkelijk is dat het onder bepaalde voorwaarden mogelijk is dat uit dit getouwtrek een gesynchroniseerde collectieve beweging ontstaat.
Wanneer de actieve vaste stof eenvoudig op de vloer wordt geplaatst, worden de Hexbugs spontaan uitgelijnd en begint de hele vaste stof door het laboratorium te bewegen. Wat als we de vaste stof aan de randen vasthaken? In dit geval wordt een nieuw type collectieve beweging waargenomen in de vaste stof:alle elementen van het netwerk oscilleren op een periodieke en gesynchroniseerde manier rond hun evenwichtspositie.
Om dit fenomeen van "collectieve activering" te verklaren, varieerden de onderzoekers de parameters van het experiment, zoals de stijfheid van de veren of de vorm van het netwerk. Ze toonden aan dat collectieve activering het resultaat is van de combinatie van de activiteit van de Hexbugs en de elasticiteit van de netwerkverbindingen, waardoor de structuur kan vervormen en elke Hexbug zichzelf kan oriënteren als reactie op deze vervorming. Het team heeft het waargenomen gedrag gemodelleerd en numeriek gereproduceerd, ook in systemen met enkele duizenden actieve agenten. Deze spontane collectieve activering doet denken aan de bewegingen die worden waargenomen in bepaalde cellulaire dynamica, met name in bepaalde huidweefsels, die daarom beter kunnen worden begrepen in het licht van dit werk. + Verder verkennen
De volgende generatie robots zullen vormveranderaars zijn
 Schijnbare Atlantische opwarmingscyclus waarschijnlijk een artefact van klimaatforcering
Schijnbare Atlantische opwarmingscyclus waarschijnlijk een artefact van klimaatforcering- NASA-NOAA-satelliet analyseert tyfoon Wutip
- Bestrijdingsmiddelenmengsels groter probleem dan eerder gedacht
- Vermindering van fosfor in meren in China dankzij overheidsinspanningen
- Deeltjes aan het oceaanoppervlak en de zeebodem zijn niet zo verschillend
Hoofdlijnen
- Hoe neemt een slijmvorm beslissingen zonder hersenen?
- Bioom: definitie, types, kenmerken en voorbeelden
- Arctisch, grote visserslanden zijn het erover eens dat er niet gevist wordt in het noordpoolgebied, voor nu
- Het immuunsysteem van planten kan zich aanpassen aan niet-levende omgevingsstressoren, onthult nieuwe studie
- Waarom hebben cellen voedsel nodig?
- Kleine Braziliaanse kikkers zijn doof voor hun eigen roep
- Onderzoek suggereert vrouwelijk voordeel in levensverwachting gerelateerd aan fundamentele biologische wortels
- Wat is een Zygote?
- Onderzoeksartikelen werpen licht op een decennium lang stamcelmysterie
- Kwantumfaseovergang ontdekt in een quasi-2D-systeem dat puur uit spins bestaat
- Rekbaar hologram kan schakelen tussen meerdere afbeeldingen

- Supermans laservisie een stap dichter bij de realiteit

- Primordiale zwarte gaten hebben mogelijk geholpen bij het smeden van zware elementen

- Nieuwe benadering om vloeistofweerstand op het lichaam te meten tijdens het zwemmen

 Loodhoudende benzine raakt leeg, eeuw na eerste waarschuwingen:UN
Loodhoudende benzine raakt leeg, eeuw na eerste waarschuwingen:UN- Geen aannames nodig om aardoliereservoirs te simuleren
- Eerste uitrol van Ariane 6 mobiele portaal
- Hoe werken piëzoresistieve druksensoren?
- Australië kan binnenkort zonneschijn naar Azië exporteren via een kabel van 3800 km
- Door meer grote vissen in zee te laten, wordt de CO2-uitstoot verminderd
- Onderzoekers ontwikkelen techniek om elektronenspinspanning te regelen en te meten
- Natuurbranden hebben invloed op de waterkwaliteit
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
