Wetenschap
Hoe u robots aan de lopende band kunt helpen schakelen en bijna alles oppakken
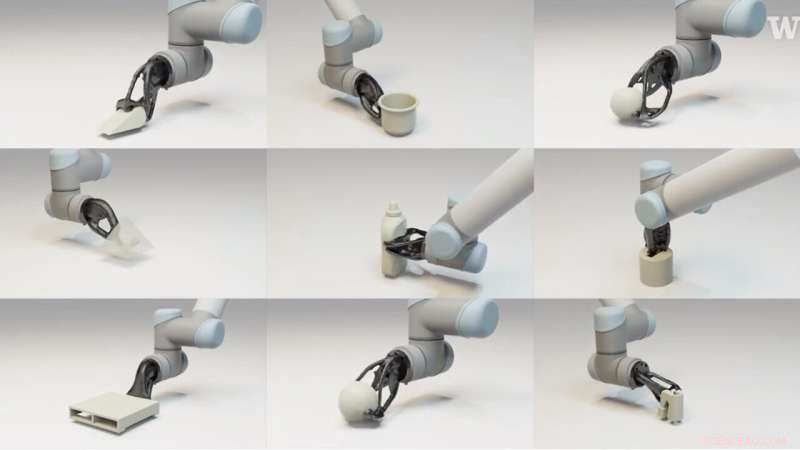
Krediet:Universiteit van Washington
Aan het begin van de COVID-19-pandemie verlegden autofabrikanten zoals Ford hun productiefocus snel van auto's naar maskers en ventilatoren.
Om deze omschakeling mogelijk te maken, vertrouwden deze bedrijven op mensen die aan een lopende band werkten. Het zou voor een robot te uitdagend zijn geweest om deze overgang te maken, omdat robots gebonden zijn aan hun gebruikelijke taken.
Theoretisch zou een robot bijna alles kunnen oppakken als zijn grijpers voor elke taak kunnen worden verwisseld. Om de kosten laag te houden, kunnen deze grijpers passief zijn, wat betekent dat grijpers objecten oppakken zonder van vorm te veranderen, vergelijkbaar met hoe de tang op een vorkheftruck werkt.
Een team van de Universiteit van Washington heeft een nieuwe tool ontwikkeld die een 3D-printbare passieve grijper kan ontwerpen en de beste weg kan berekenen om een object op te pakken. Het team heeft dit systeem getest op een reeks van 22 objecten, waaronder een 3D-geprint konijntje, een deurstopper-vormige wig, een tennisbal en een boormachine. De ontworpen grijpers en paden waren succesvol voor 20 van de objecten. Twee daarvan waren de wig en een piramidevorm met een gebogen sleutelgat. Beide vormen zijn een uitdaging voor meerdere soorten grijpers om op te pakken.
Het team zal deze bevindingen op 11 augustus presenteren op SIGGRAPH 2022.
"We produceren nog steeds de meeste van onze artikelen met assemblagelijnen, die echt geweldig zijn, maar ook erg rigide. De pandemie heeft ons laten zien dat we een manier moeten hebben om deze productielijnen gemakkelijk opnieuw te gebruiken", zegt senior auteur Adriana Schulz, een UW-assistent-professor in de Paul G. Allen School of Computer Science &Engineering. "Ons idee is om aangepaste tooling te maken voor deze productielijnen. Dat geeft ons een heel eenvoudige robot die één taak kan uitvoeren met een specifieke grijper. En als ik de taak verander, vervang ik gewoon de grijper."
Passieve grijpers kunnen niet worden aangepast aan het object dat ze oppakken, dus traditioneel zijn objecten ontworpen om bij een specifieke grijper te passen.
"De meest succesvolle passieve grijper ter wereld is de tang op een vorkheftruck. Maar het nadeel is dat vorkheftrucktangen alleen goed werken met specifieke vormen, zoals pallets, wat betekent dat alles wat je wilt vastpakken op een pallet moet staan," zei co-auteur Jeffrey Lipton, UW-assistent-professor werktuigbouwkunde. "Hier zeggen we 'Oké, we willen de geometrie van de passieve grijper niet vooraf definiëren.' In plaats daarvan willen we de geometrie van elk object nemen en een grijper ontwerpen."
Voor elk object zijn er veel mogelijkheden voor hoe de grijper eruit zou kunnen zien. Daarnaast is de vorm van de grijper gekoppeld aan de weg die de robotarm aflegt om het object op te pakken. Als het verkeerd is ontworpen, kan een grijper tegen het object botsen op weg naar het oppakken. Om deze uitdaging aan te gaan, hadden de onderzoekers een paar belangrijke inzichten.
"De punten waar de grijper contact maakt met het object zijn essentieel om de stabiliteit van het object in de greep te houden. We noemen deze reeks punten de 'grijpconfiguratie'", zegt hoofdauteur Milin Kodnongbua, die dit onderzoek voltooide als een UW-student. op de Allenschool. "Bovendien moet de grijper contact maken met het object op die bepaalde punten, en de grijper moet een enkel solide object zijn dat de contactpunten met de robotarm verbindt. We kunnen zoeken naar een invoegbaan die aan deze vereisten voldoet."
Bij het ontwerpen van een nieuwe grijper en baan begint het team door de computer een 3D-model te geven van het object en zijn oriëntatie in de ruimte - hoe het bijvoorbeeld op een lopende band zou worden gepresenteerd.
"Eerst genereert ons algoritme mogelijke grijpconfiguraties en rangschikt ze op basis van stabiliteit en enkele andere statistieken", zei Kodnongbua. "Dan neemt het de beste optie en co-optimaliseert om te vinden of een invoegtraject mogelijk is. Als het er geen kan vinden, gaat het naar de volgende grijpconfiguratie op de lijst en probeert het de co-optimalisatie opnieuw uit te voeren."
Zodra de computer een goede match heeft gevonden, voert hij twee sets instructies uit:een voor een 3D-printer om de grijper te maken en een met het traject voor de robotarm zodra de grijper is afgedrukt en bevestigd.
Het team koos een verscheidenheid aan objecten om de kracht van de methode te testen, waaronder enkele uit een dataset van objecten die de standaard zijn voor het testen van het vermogen van een robot om manipulatietaken uit te voeren.
"We hebben ook objecten ontworpen die een uitdaging zouden zijn voor traditionele grijprobots, zoals objecten met zeer ondiepe hoeken of objecten met interne greep - waar je ze moet oppakken met het insteken van een sleutel", zegt co-auteur Ian Good, een UW-promovendus op de afdeling werktuigbouwkunde.
De onderzoekers voerden 10 testpickups uit met 22 vormen. Voor 16 vormen waren alle 10 pickups succesvol. Hoewel de meeste vormen ten minste één succesvolle pick-up hadden, hadden twee dat niet. Deze fouten waren het gevolg van problemen met de 3D-modellen van de objecten die aan de computer werden gegeven. Voor één - een kom - beschreef het model de zijkanten van de kom als dunner dan ze waren. Voor het andere - een object dat eruitziet als een kopje met een eivormig handvat - had het model niet de juiste oriëntatie.
Het algoritme ontwikkelde dezelfde grijpstrategieën voor objecten met dezelfde vorm, zelfs zonder menselijke tussenkomst. De onderzoekers hopen dat dit betekent dat ze passieve grijpers kunnen maken die een klasse objecten kunnen oppakken, in plaats van dat ze voor elk object een unieke grijper moeten hebben.
Een beperking van deze methode is dat passieve grijpers niet kunnen worden ontworpen om alle objecten op te pakken. Hoewel het gemakkelijker is om objecten met een verschillende breedte of uitstekende randen op te pakken, zijn objecten met gelijkmatig gladde oppervlakken, zoals een waterfles of een doos, moeilijk vast te pakken zonder bewegende delen.
Toch werden de onderzoekers aangemoedigd om te zien dat het algoritme het zo goed deed, vooral met enkele van de moeilijkere vormen, zoals een kolom met een sleutelgat bovenaan.
"Het pad dat ons algoritme daarvoor bedacht heeft, is een snelle versnelling naar beneden tot waar het heel dicht bij het object komt. Het leek erop dat het tegen het object zou botsen, en ik dacht:"Oh nee. Wat als we het niet goed hebben gekalibreerd?'" zei Good. "En dan komt het natuurlijk ongelooflijk dichtbij en pakt het dan perfect op. Het was dit ontzagwekkende moment, een extreme achtbaan van emoties."
Yu Lou, die dit onderzoek als masterstudent aan de Allen School afrondde, is ook co-auteur van dit artikel.
 Nieuwe methode voor het genereren van krachtige, specifieke bindende eiwitten voor nieuwe medicijnen
Nieuwe methode voor het genereren van krachtige, specifieke bindende eiwitten voor nieuwe medicijnen- Glanzende megakristallen die zichzelf bouwen
- Een test van 25 minuten kan de eerste diagnose van urineweginfecties vereenvoudigen, strijd tegen antibioticaresistentie
- Gebruik van Alkali
- Ingenieurs 3D-print vormveranderende slimme gel
- Droogte in Europa:Duitse industrie loopt gevaar door dalend Rijnpeil
- Dodelijke Indonesische tsunami werd ontketend door aardverschuiving in Palu Bay, studie suggereert:
- Australië spant zich in om duizenden te bereiken die zijn gestrand door bosbranden
- Crowded Plate-technieken in Microbiology
- Gevaarlijke koude rillingen, sneeuw in het Midwesten; koude grepen Noordoost
Hoofdlijnen
- De patronen van klimaatverandering
- Wetenschappers ontdekken dat genen worden aangestuurd door nanovoetballen
- Hoe maak je een werkend hart Model
- Wanneer zijn genetische variaties ontstaan die ons menselijk maken?
- Radiometrische datering: definitie, hoe werkt het, gebruik & voorbeelden
- Tribunelichten van 9/11 kunnen gevaarlijk zijn voor vogels studie zegt:
- Nieuwe mechanismen ontdekt die bacteriën gebruiken om zichzelf te beschermen tegen antibiotica
- G2-fase: wat gebeurt er in deze subfase van de celcyclus?
- Hoe gentherapie werkt
- Vrienden met voordelen:kan Facebook je liefdesleven aanpakken?

- Kinderen hebben mogelijk meer hulp nodig bij het vinden van antwoorden op hun vragen in het informatietijdperk

- Vermijd de politiek en laat kunstmatige intelligentie uw stem bepalen bij de volgende verkiezingen

- Big Data-mining voor betere prestaties van contactcenters

- Ghosn:een magnaat vol verrassingen


 Kwantumwaarnemers hebben mogelijk recht op hun eigen feiten
Kwantumwaarnemers hebben mogelijk recht op hun eigen feiten- Filippijnse vulkaan nog steeds levensbedreigend ondanks stilte
- Hoe blockchain en machine learning de belofte van omnichannelmarketing kunnen waarmaken
- Slangeneieren identificeren
- Spin-opruimingsmethode brengt praktische kwantumcomputers dichter bij de realiteit
- Hoe zal COVID-19 er in de verre toekomst voor geologen uitzien?
- Vage antiterreurwetten kunnen ertoe leiden dat liefdadigheidsinstellingen zich terugtrekken uit activiteiten
- Yeti-onderzoek onthult nieuwe informatie over Himalaya en Tibetaanse beren
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
