Wetenschap
Kijk naar kleine elektromechanische robots die sneller zijn dan cheeta's voor hun formaat
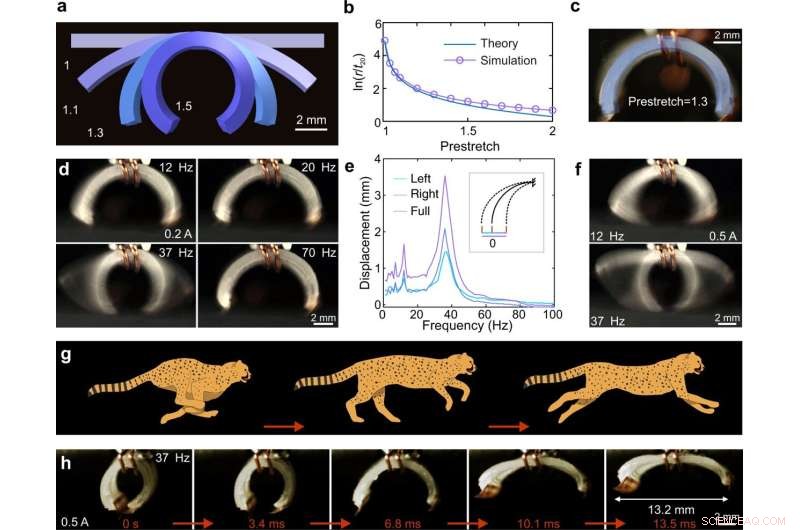
Ontwerp en karakterisering van kleinschalige SEMR's. a Gesimuleerde vorm van de dubbellaagse film met verschillende voorrekken:1.0, 1.1, 1.3 en 1.5. b Gesimuleerde en berekende straal van de dubbellaagse film als functie van de toegepaste voorrek. c Over elkaar geplaatste afbeeldingen van de experimentele en gesimuleerde SEMR-vormen (zijaanzicht) met een voorrek van 1,3. d Momentopnamen van de SEMR-trillingen voor 0,2 A blokgolfstroom met verschillende frequenties (aanvullende film 2). De frames van 37 Hz en 12 Hz komen overeen met de belangrijkste en de op één na grootste spectrale maxima, die te zien zijn in e. e Horizontale verplaatsing van de linkervoet van de robot onderworpen aan een 0,2 A blokgolfstroom bij verschillende frequenties (aanvullende film 2). De robot is bovenop een magneet gemonteerd en in het midden geklemd met koperdraden. De inzet illustreert drie verplaatsingen (Links, Rechts en Volledig). Ze komen overeen met de maximale verplaatsing van de referentie "0"-positie (geen stroom) naar respectievelijk links (extensie), rechts (contractie) en hun som. De bovenste curve (Full) toont het volledige bereik van de voetverplaatsing. f Frames van de trillingstest voor 0,5 A blokgolfstromen bij frequenties van 12 Hz en 37 Hz (aanvullende film 2) illustreren het bewegingsbereik weg en dichtbij de resonantiefrequentie. g Illustratie van een rennende cheeta. h Snapshots van de high-speed cameravideo (aanvullende film 2), die stadia van de robotbeweging laten zien die worden aangedreven door een blokgolfstroom (0,5 A, 37 Hz). Krediet:Natuurcommunicatie (2022). DOI:10.1038/s41467-022-32123-4
Een team van onderzoekers van de Johannes Kepler University in Oostenrijk heeft een reeks kleine, bestuurbare elektromechanische robots ontwikkeld die voor hun grootte met hoge snelheden kunnen lopen, rennen, springen en zwemmen. In hun paper gepubliceerd in het tijdschrift Nature Communications, de groep beschrijft hoe ze hun robots hebben gebouwd en stelt mogelijke toepassingen voor.
Zoals de onderzoekers opmerken, kunnen veel dieren snel bewegen, bijvoorbeeld cheeta's of gazellen. Deze eigenschappen zijn geëvolueerd om de dieren te helpen prooien te vangen of te ontwijken door roofdieren. Het creëren van robots met vergelijkbare snelheidscapaciteiten is al vele jaren een doel van wetenschappers, maar het is moeilijk gebleken om dit te bereiken. In deze nieuwe poging bouwden de onderzoekers een reeks robots met behulp van zachte, kleine elektromagnetische actuatoren met ingebedde vloeibaar-metalen spoelen die snel zijn voor hun grootte.
Om hun robots te maken, printten de onderzoekers vloeibare metalen spoelen op verschillende substraten met verschillende gewenste eigenschappen, zoals buigbaarheid. De spoelen waren zo bedrukt dat verschillende delen van het substraat op de gewenste manier konden worden gemanipuleerd - bijvoorbeeld door slechts één deel te buigen, zou een achterkant kunnen zwiepen als een staart bij het zwemmen als een vis. Buigen van andere delen toegestaan voor lopen, springen en sturen. De onderzoekers voegden ook andere elementen toe om de prestaties te verbeteren, zoals zaagtand- of L-vormige voeten. Alle robots werden bestuurd met behulp van een magnetisch veld en gevoed via een ketting of batterijpakket.
De onderzoekers gebruikten lichaamslengtes per seconde (BL/s), wat vergelijkingen mogelijk maakt met niet alleen andere kleine robots, maar ook met robots van alle soorten en maten, en zelfs met dieren. Een Formule I-raceauto kan bijvoorbeeld met ongeveer 50 BL/s bewegen.
Bij het testen van hun robots ontdekten de onderzoekers dat hun aangebonden lopende robot ter grootte van een postzegel kon bewegen met ongeveer 70 BL/s op het beste oppervlak en ongeveer 35 BL/s op willekeurige oppervlakken - zijn ongebonden robot, belast met een batterijpakket, kon slechts 2,1 BL/s aan. Ze ontdekten ook dat hun vastgebonden zwemrobot kon zwemmen met ongeveer 4,8 BL/s. Om de resultaten in perspectief te plaatsen:een cheetah rent tussen de 20 en 30 BL/s. + Verder verkennen
Kleine visvormige robot 'zwemt' rond en pikt microplastics op
© 2022 Science X Network

Hoofdlijnen
- Resultaten van Landmark NASA DNA Twin Study zijn binnen
- Evolutie in je achtertuin - koolmezen passen hun snavel misschien aan aan vogelvoeders
- Vijf olifanten gedood door trein in India
- Onderzoekers vinden een veelbelovende manier om muggen te slim af te zijn
- Een benadering van het hele lichaam om chemosensorische cellen te begrijpen
- Voedselgeur verbetert de aantrekkelijkheid van mannelijke vliegen
- Virussen kennis ontsloten door nieuwe metagenomics-technologieën
- Uitsterven dreigt voor twee zeldzame vogelsoorten na verwoestende orkanen
- Controversiële onkruidverdelger houdt EU in de knoop (Update)
- Robots lopen, praten, bier schenken en de CES tech show overnemen

- Simulatie voor nettransmissie, verdeling

- Ziekenhuis gebruikt drones om bloedmonsters tussen gebouwen te vliegen

- MOOSE:een platform om complexe multifysica-simulaties te maken

- Na de overname van Fox Studio, Disney kijkt naar het volgende hoofdstuk


 Hot ring produceert draadloos microgolf-aangedreven ultrasone pulsen
Hot ring produceert draadloos microgolf-aangedreven ultrasone pulsen- Wat is een poolmolecuul?
- Kortetermijnmodellering voorspelt droogte voor Zuidoost-VS
- Volkswagen zegt gezien bestuurswisselingen, kan nieuwe CEO benoemen
- Hoe is ontbossing van invloed op het weer?
- Hoe de kwadratische formule te gebruiken om een kwadratische vergelijking op te lossen
- Hadden dinosaurussen veren?
- Risico van uitsterven van zeevruchten:mariene tweekleppigen in gevaar?
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
