Wetenschap
Een versterkend leerkader om de voetbalschietvaardigheden van viervoetige robots te verbeteren
Krediet:Ji et al.
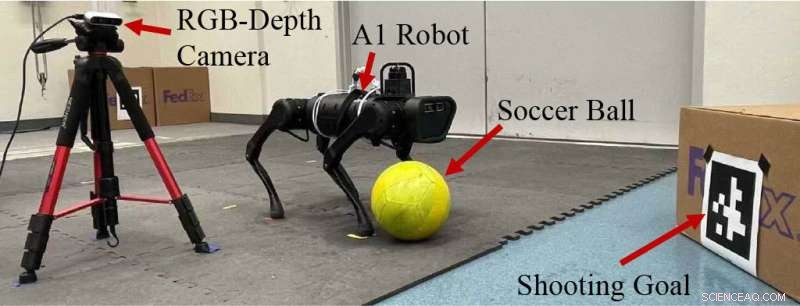
Onderzoekers University of California, Berkeley (UC Berkeley), Université de Montréal en Mila hebben onlangs een hiërarchisch leerkader voor versterking ontwikkeld om de precisie van quadrupedale robots bij voetbalschieten te verbeteren. Dit raamwerk, geïntroduceerd in een paper dat vooraf is gepubliceerd op arXiv, werd ingezet op een Unitree A1, een viervoetige robot ontwikkeld door UnitreeRobotics.
"Menselijke benen zijn niet alleen voor voortbeweging, maar kunnen ook worden gebruikt voor manipulatie zoals voetballen, en we willen quadrupedale robots in staat stellen dit vermogen ook te bereiken", vertelde Zhongyu Li, een van de onderzoekers die het onderzoek uitvoerde, aan TechXplore. "Er is een opmerkelijke competitie in de robotica-gemeenschap genaamd 'RoboCup' (Robot World Cup), die onderzoekers al tientallen jaren uitnodigt om hun robots te trainen om voetbalwedstrijden te spelen."
Recente ontwikkelingen hebben de creatie van betrouwbaardere hardware en geavanceerde besturingsalgoritmen voor robots mogelijk gemaakt. Als gevolg hiervan zijn robots nu wendbaarder en kunnen ze mogelijk complexere taken aan, waaronder samen met mensen voetballen. Het door Li en zijn collega's ontwikkelde raamwerk zou kunnen helpen om het vermogen van viervoetige robots om de bal te schieten tijdens voetbalwedstrijden te verbeteren.
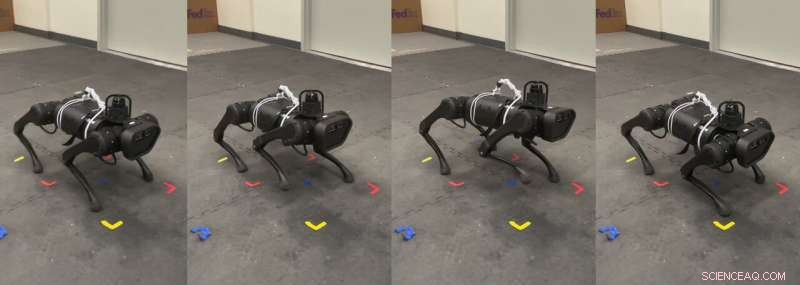
Het nieuwe raamwerk heeft twee belangrijke componenten:een motion control-beleid en een motion planning-beleid. Met de motion control-component kan de robot een willekeurig traject volgen voor de teen op zijn trappende been. Het bewegingsplanningsbeleid selecteert daarentegen een optimaal teentraject om een nabijgelegen voetbal (gedetecteerd door een externe camera) naar een doellocatie (bijvoorbeeld de doelpaal) te schieten.
Krediet:Ji et al.
"Ons ontwerp stelt ons in staat om de uitdaging van de precieze voetbaltaak te ontkoppelen in de twee subtaken:controle en planning," zei Li. "We kunnen ons eerst concentreren op het trainen van een robuust controlebeleid dat op de hardware kan werken, en vervolgens zo'n controller hergebruiken om de planningsstrategie te leren. Om de bal precies op doelen in de echte wereld te schieten, wordt de planner getraind met behulp van de echte -wereldgegevens wanneer de robot de echte voetbal schiet."
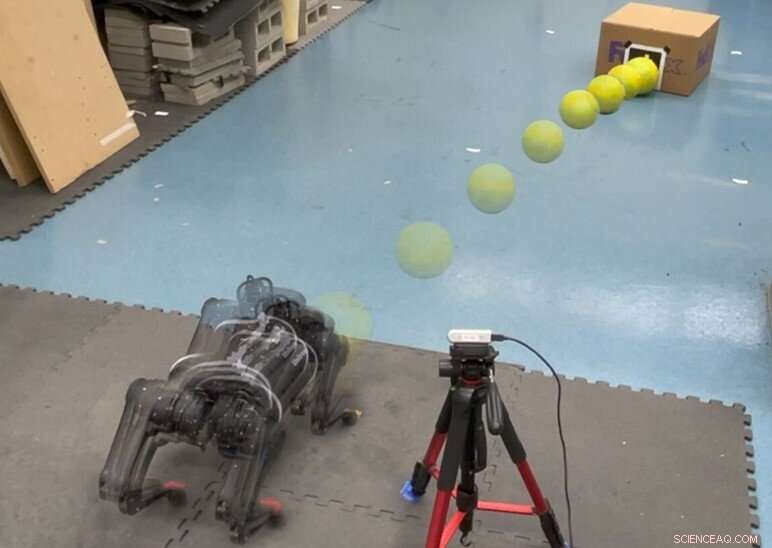
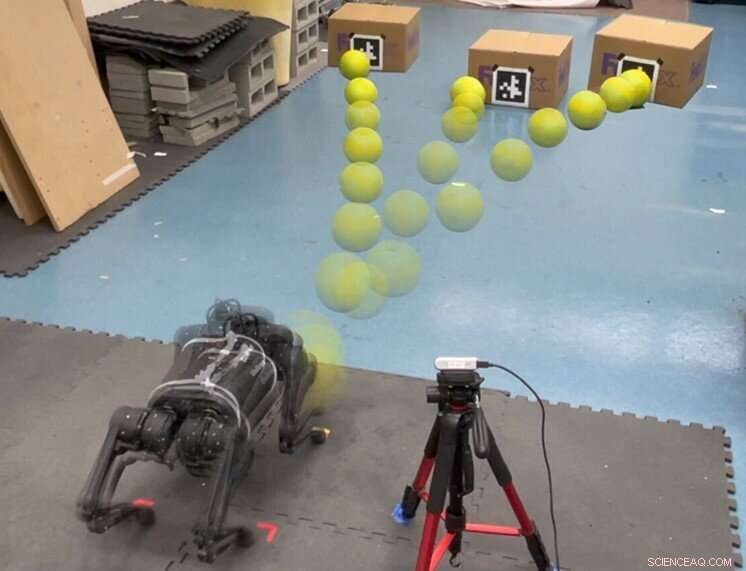
Li en zijn collega's testten hun raamwerk in een reeks real-world tests, met behulp van een A1-viervoeter. Ze ontdekten dat de robot een vervormbare voetbal met hoge precisie naar willekeurige doelen kon schieten. Dit is een zeer complexe taak om aan te pakken, omdat de robot zijn schoppende been snel moet zwaaien en momentum moet krijgen zonder zijn evenwicht te verliezen.
"De voetbal introduceert meer uitdagingen omdat de robot niet alleen moet omgaan met het moeilijk te modelleren zachte contact met de vervormbare bal, maar ook met de onzekerheden van de rollende wrijving tussen de bal en de grond," zei Li. "De methodologie die we hebben ontwikkeld om dergelijke problemen aan te pakken, kan mogelijk nuttig zijn voor taken waarbij dynamische robots, zoals robots met poten, moeten communiceren met zachte objecten, zoals bal, touwen, riem, kleding, enz."
-

Krediet:Ji et al.
-
Krediet:Ji et al.
-
Krediet:Ji et al.
In de toekomst kan het raamwerk dat door dit team van onderzoekers is gecreëerd, worden gebruikt om de prestaties van robots in voetbaltoernooien te verbeteren, met name Robocup. Ondertussen zijn Li en zijn collega's van plan andere raamwerken en machine learning-modellen te bedenken om de prestaties van robots in andere elementen van voetbal te verbeteren.
"Ons langetermijndoel is om viervoetige robotvoetbalspelers te ontwikkelen die op een dag kunnen concurreren met mensen", voegde Li eraan toe. "We ontwikkelen complexere voetbalvaardigheden met behulp van quadrupedal-robots en hopelijk kunnen we in de nabije toekomst een volledig autonoom voetbalspel starten met quadrupedal-robots." + Verder verkennen
Een Q-learning-algoritme om schoten te genereren voor lopende robots in voetbalsimulaties
© 2022 Science X Network
 Video:Waarom je geen verse olijven kunt kopen
Video:Waarom je geen verse olijven kunt kopen- Nieuw onderzoek zet glucosetransporteiwitten om in wateroplosbare vorm
- Grootschalige bereiding van op polymeer gebaseerde fosforescentie bij kamertemperatuur via klikchemie
- Nieuwe techniek volgt individuele eiwitbeweging op levende cellen
- Hoe de aanwezigheid van insecticiden in groenten en fruit te detecteren
Hoofdlijnen
- Wetenschappers visualiseren de structuur van de belangrijkste DNA-reparatiecomponent met een bijna-atomaire resolutie
- Antidepressiva uit urine maken vissen minder bang voor roofdieren
- Hoe groeit schimmel op voedsel?
- Cowbird-kuikens doen het het beste met twee grasmusnesten - niet vier, niet nul, studievondsten
- Landschaps- en klimaatfactoren kunnen de prevalentie van de ziekte van Lyme voorspellen
- Paarden kunnen onze lichaamstaal lezen, zelfs als ze ons niet kennen
- Hibernerende ribosomen helpen bacteriën te overleven
- Wat levert glycolyse op?
- Verander je geliefde in een boom met Bios Urn
- Beveiligingsteam besprak de zwakte in bare-metal services

- VS openen onderzoek naar 4 autofabrikanten over emissiepact in Californië

- Dankzij nieuwe technologie kunnen softwarecomponenten met weinig rekenwerk van elkaar worden geïsoleerd

- China mengt zich in blockchain-race met VS

- Snelle kwantumcryptografische communicatie met belangrijke distributiesnelheden van meer dan 10 Mbps


 Een simpel duwtje is niet genoeg om nepnieuws aan te pakken, maar deze tactieken kunnen helpen
Een simpel duwtje is niet genoeg om nepnieuws aan te pakken, maar deze tactieken kunnen helpen- Robuuste en goedkope katalysatoren voor waterstofproductie
- NASA ziet orkaan Oscar overgaan naar extratropisch laag
- Beperking van klimaatverandering niet de belangrijkste drijfveer bij regeneratieve veeteelt
- Het delen van controle met robots kan de productie veiliger maken, efficiënter
- Onderzoekers bouwen een model dat bedrijfssluitingen in steden voorspelt met 80% nauwkeurigheid
- Egypte ontdekt oude haven gebruikt door tempelbouwers
- Chemici ontwikkelen een veelbelovende methode voor medicijnsynthese
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
