Wetenschap
Neuromorfe controllers om de controle tijdens de landing in microluchtvoertuigen te verbeteren

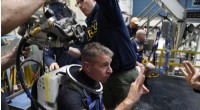
Afbeelding van de experimentele opstelling van de onderzoekers, met een MAV die boven de plaid zweeft waar hij zou moeten landen. Credit:Hagenaars et al.
Vliegende insecten kunnen efficiënt door hun omgeving navigeren, visuele prikkels verwerken om obstakels te vermijden en veilig te landen op verschillende ondergronden. In de afgelopen tien jaar of zo, onderzoeksteams over de hele wereld hebben geprobeerd deze mogelijkheden te repliceren in autonome micro-luchtvoertuigen (MAV's) met behulp van mechanismen die vergelijkbaar zijn met die waargenomen bij insecten.
Onderzoekers van het MAVLab van de TU Delft proberen al jaren op insecten geïnspireerde technieken te ontwikkelen die navigatie- en landingsstrategieën in kleine drones kunnen verbeteren. In een recent artikel dat vooraf is gepubliceerd op arXiv, ze introduceerden een nieuwe strategie voor het maken van neuromorfe controllers die de landingen in MAV's zouden kunnen verbeteren.
"In het MAVLab van de TU Delft, we bestuderen de autonome vlucht van kleine drones, "Jesse Hagenaars, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. “Dit is een grote uitdaging, omdat onze drones (soms zo licht als 20 gram) extreem beperkte bronnen hebben op het gebied van energie, voelen en verwerken. Daarom halen we veel inspiratie uit de natuur, en vooral, van vliegende insecten."
In eerder werk, onderzoekers van het MAVLab ontwikkelden een reeks bio-geïnspireerde technieken voor op zicht gebaseerde bewegingsschatting met behulp van spiking neurale netwerken (SNN's). SNN's zijn een klasse van kunstmatige neurale netwerken die neurale netwerken in het menselijk brein nauw nabootsen, activeringspieken gebruiken om informatie te berekenen en te analyseren.
In hun nieuwe studie de Hagenaars en zijn collega's wilden hun technieken nog een stap verder brengen, ze gebruiken om de vlucht en landing van MAV's te besturen. Om dit te doen, gingen ze een samenwerking aan met het Nationaal Onderzoeksinstituut voor Informatica en Wiskunde (CWI), die een hoog niveau van expertise heeft in de ontwikkeling van spiking neurale netwerken.
"Het uiteindelijke doel van ons onderzoek is om bewegingsschatting en controle te verbinden om te eindigen met een volledig bio-geïnspireerde pijplijn, die veel efficiënter zal zijn in termen van energieverbruik dan traditionele op visie gebaseerde controlebenaderingen, ' zei Hagenaars. 'Voorlopig, om de haalbaarheid van het besturingsgedeelte aan te tonen, we hebben onze aanpak toegepast op landingsmanoeuvres."
De meeste eerder ontwikkelde technieken om MAV's te besturen tijdens op zicht gebaseerde landingen zijn gebaseerd op proportionele controllers en conventionele ANN's. Controllers op basis van SNN's hebben het potentieel om vergelijkbare of zelfs betere resultaten te behalen met een veel grotere energie-efficiëntie.
In tegenstelling tot conventionele kunstmatige neurale netwerken (ANN's), waarin elk individueel neuron bij elke tijdstap een reële waarde doorgeeft, SNN's geven alleen een binaire piek af wanneer ze voldoende stimulatie ontvangen. Aangezien elke individuele piek of berekening een bepaalde hoeveelheid energie vereist, SNN's zijn over het algemeen veel energiezuiniger dan conventionele ANN's, omdat ze over het algemeen worden geïmplementeerd met behulp van wat bekend staat als 'neuromorfe hardware'.
"Hoewel we onze spiking-controllers niet op neuromorfe hardware hebben geïmplementeerd, we zijn wel een stap verder gegaan op het gebied van energie-efficiëntie, door het aantal pieken te minimaliseren dat door het netwerk wordt gebruikt om controle uit te voeren, "Zei Hagenaars. "Dit werd gedaan door het aantal pieken als doelstelling op te nemen tijdens de evolutionaire optimalisatie van de controllers."
Hagenaars en zijn collega's trainden hun op SNN gebaseerde controllers met behulp van simulatietools, en evalueerde vervolgens hun prestaties in real-world omgevingen. Hun experimenten leverden veelbelovende resultaten op, met de controllers die snelle en veilige MAV-landingen mogelijk maken, terwijl SNN-pieken en dus energieverbruik tot een minimum worden beperkt.
interessant, de onderzoekers ontdekten ook dat spiking-controllers die minder spikes produceren (d.w.z. minder energie verbruiken) presteerden net zo goed als anderen die meer pieken produceren. In feite, het beperken van het aantal inkomende pieken leek de overdracht van de landingsmogelijkheden van een controller van gesimuleerde omgevingen naar de echte wereld te vereenvoudigen.
"Allereerst, dit werk is het eerste dat spiking neurale netwerken integreert in de regelkring van een echte vliegende robot, ' zei Hagenaars. 'Ten tweede, we minimaliseren de pieksnelheid van de controllers aanzienlijk, wat zou resulteren in aanzienlijke energiebesparingen bij implementatie op neuromorfe hardware. Naast het zo klein mogelijk maken van de spikingnetwerken, we nemen de netwerkpieksnelheid op als een doelstelling in de evolutie met meerdere doelstellingen."
Hagenaars en zijn collega's van de TU Delft waren een van de eersten die SNN's gebruikten voor het besturen van vliegende robots in echte omgevingen. De controllers die ze hebben gemaakt, kunnen onderzoekers uiteindelijk helpen om de prestaties en energie-efficiëntie van zowel bestaande als nieuw ontwikkelde MAV's te verbeteren, vooral tijdens de landing.
"Ons recente artikel was alleen gericht op bio-geïnspireerde controle op basis van een bepaalde bewegingsschatting, Hagenaars zei. "De eigenlijke methode om deze beweging te schatten was, echter, niet erg bio-geïnspireerd. Daarom, we willen onze controller nu combineren met de bio-geïnspireerde bewegingsschattingsmethode (ook gebaseerd op spiking-netwerken) die eerder door het MAVLab is ontwikkeld, om te eindigen met een volledig bio-geïnspireerde pijplijn."
Tot dusver, de onderzoekers hebben hun controllers alleen getest op conventionele chips, maar de energiebesparingen die ze voorspelden, kunnen alleen worden gerealiseerd met behulp van neuromorfe hardware. In hun toekomstige werk, ze hopen ze dus ook te implementeren op neuromorfe chips, zoals Intel's Loihi-chip.
© 2020 Wetenschap X Netwerk
 Hoe robotwiskunde en smartphones onderzoekers naar een doorbraak in de ontdekking van medicijnen hebben geleid
Hoe robotwiskunde en smartphones onderzoekers naar een doorbraak in de ontdekking van medicijnen hebben geleid- Wetenschappers kijken naar vetmetabolisme in levende vissen, observeer real-time lipidenbiochemie
- Klassieke wetenschap thuis: olifantentandpasta
- Chemicus creëert nieuwe katalysatoren voor klikreacties
- Hoe gebogen oppervlakken in alle vormen uitzetten en samentrekken?
- Gebrek aan water is de belangrijkste stressfactor voor stadsbomen
- Hoe beïnvloeden Landforms en waterdiepten het klimaat?
- Ondanks beloften van IOC, duurzaamheid van de Olympische Spelen neemt af
- Uw drinkwater kan zouter zijn dan u denkt (zelfs als u in een hoofdstad woont)
- Chemische stoffen van opkomende zorg in kaart gebracht in drie Grote Meren
Hoofdlijnen
- Stamcelvaccins: de nieuwe grens in kanker-therapie?
- Genieten criminele psychopaten van de angst van andere mensen?
- Welke mechanismen zorgen voor de nauwkeurigheid van DNA-replicatie?
- Welke elementen worden in levende organismen gevonden?
- Bij voetbalsucces draait alles om vaardigheid:studeren
- Ondanks de wet stijgt het aantal doden door loodvergiftiging in New Hampshire
- Onderzoekers maken een kaart van het microbiële landschap van de darmen
- 25 soorten onthuld voor 25 Genomes Project
- De ecologische kosten van oorlog:conflict een consequente moordenaar van Afrikaanse megafauna
- Diep ademhalen:nieuwe rebreather helpt marineduikers onder de golven
- Harvard-forum onderzoekt de veiligheid van zelfrijdende voertuigen

- Fitbit lanceert $ 149 Charge 4 met GPS-tracking

- Afvalwarmte omzetten in waterstofbrandstof
- Franse toezichthouder beveelt Google auteursrechten te betalen aan mediagroepen


 Verenigde Staten, China-team onderzoekt energiewinning
Verenigde Staten, China-team onderzoekt energiewinning- Het kritieke punt bij het doorbreken van het glasprobleem
- Nieuw lichtgewicht metaal zo vormbaar als aluminium plaatwerk met 1,5 keer hogere sterkte
- Abell 2384:De brug buigen tussen twee clusters van sterrenstelsels
- Op weg naar Parijs:het veranderende landschap van CO2-reductie
- Veranderingen in de Antarctische mariene ecosystemen
- Wat zijn de bronnen van het Amazone-regenwoud?
- Heremietkreeftenles over ongelijkheid in rijkdom
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
