Wetenschap
Een raamwerk om zelfherconfigureerbare robotsystemen te evalueren en te vergelijken
Krediet:Tan et al.
Zelfherconfigureerbare robots (SRR's) die automatisch van vorm kunnen veranderen en zich kunnen aanpassen aan hun omgeving, hebben de laatste tijd veel belangstelling getrokken binnen de robotica-onderzoeksgemeenschap. Deze robots kunnen verschillende nuttige toepassingen hebben, omdat ze een hoge mate van autonomie kunnen verwerven in het waarnemen van hun omgeving, evenals bij het plannen en uitvoeren van passende acties. Hoewel eerdere studies methoden hebben geïntroduceerd om deze robots in subgroepen te classificeren, er is nog steeds geen standaardprocedure om hun prestaties te evalueren.
Met dit in gedachten, onderzoekers van Sun Yat-sen University in China en de en Singapore University of Technology and Design hebben onlangs een raamwerk ontwikkeld voor de taxonomie en evaluatie (TAEV) van zelf-herconfigureerbare robots. hun studie, te zien in IEEE-toegang , werd gefinancierd door het Singapore National Robotics R&D Program Office.
"Tot dusver, onderzoekers hebben een kwalitatieve benadering ontwikkeld voor het classificeren van SRR's, maar geen kwantitatieve methoden die de ontwerper kunnen leiden, fabrikant en robotgebruiker, "Abdullah Aamir Hayat, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Dit motiveerde ons om een raamwerk en evaluatiemethode voor SRR's te ontwikkelen."
In SRR's, het vermogen om van vorm te veranderen om een bepaalde taak te voltooien, is voornamelijk afhankelijk van het type mechanismen dat door de robots wordt gebruikt en hun mate van autonomie. Hoewel sommige SRR-systemen volledig autonoom zijn, andere vereisen een zekere mate van handmatige telebediening.
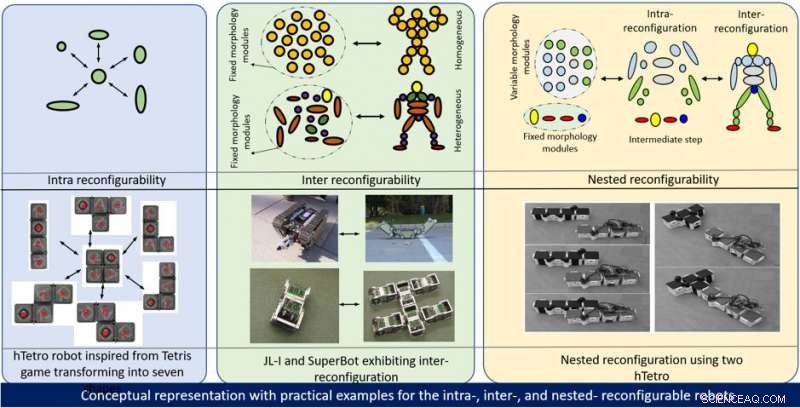
Op mechanisch vlak is de robots kunnen worden ingedeeld in drie hoofdcategorieën:die met een intra-, onder-, en geneste herconfiguratie. Het verschil tussen intra- en inter-herconfiguraties ligt in het aantal configuraties dat beschikbaar is voor de robot en de schaal van deze configuraties.
Het onderscheid tussen intra- en inter-herconfigureerbaarheid is dat de eerste een enkele robotmodule omvat die de morfologie kan veranderen zonder enige montage of demontage, en de laatste twee of meer modules omvat die kunnen worden gemonteerd of gedemonteerd. Het integreren van zowel de inter als de intra levert de geneste herconfigureerbaarheid op. Krediet:Tan et al.
Intra-herconfigureerbaarheid omvat een enkele robotmodule die zijn morfologie kan veranderen zonder enige montage of demontage, terwijl herconfigureerbaarheid twee of meer modules omvat die kunnen worden gemonteerd of gedemonteerd. Eindelijk, geneste herconfiguratie, bedacht door Prof. Mohan Rajesh Elara en Prof. Kristin L. Wood, combineert kenmerken van zowel de intra- als inter-reconfiguraties.
In hun krant Hayat en hun collega's hebben statistieken geïntroduceerd die kunnen worden gebruikt om SRR's te evalueren, het kwantificeren van hun mate van autonomie en het aantal beschikbare configuraties. Deze statistieken werden gecombineerd om een TAEV-raamwerk te creëren dat onderzoekers en fabrikanten zou kunnen begeleiden bij het evalueren van hun robotsystemen.
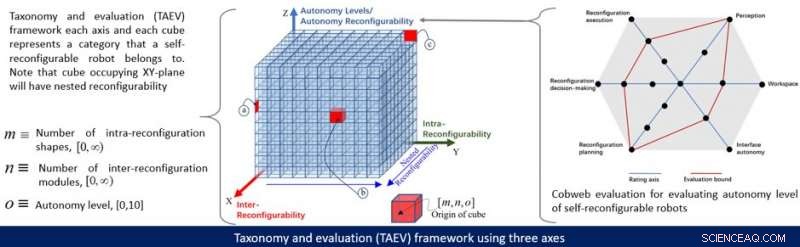
"Ons werk kwantificeert de herconfigureerbaarheid van mechanismen door een index toe te wijzen op basis van een aantal betekenismorfologie en het aantal betrokken modules, Hayat legde uit. "Deze indices worden weergegeven op de twee assen (X- en Y-) in het frame met drie assen. De derde as (Z-) wordt toegewezen aan de index die wordt gegeven door het autonomieniveau dat wordt berekend met behulp van het spinnenwebevaluatiemodel dat bestaat uit zes prestatie-indicatoren, namelijk herconfiguratieplanning, besluitvorming, interface-autonomie, perceptie, en werkruimte."
Het belangrijkste voordeel van het door Hayat en zijn collega's ontwikkelde raamwerk is dat het een unieke index toewijst aan een bepaalde SRR binnen de 3D-taxonomieruimte die ze in hun paper hebben geschetst. Als resultaat, het zou kunnen worden gebruikt om afwegingsstudies te ontwerpen en benaderingen te bedenken om de prestaties van verschillende SRR's voor dezelfde taak te beoordelen of te vergelijken.
"Het generieke raamwerk dat we hebben gepresenteerd, kan worden toegepast op tal van bestaande SRR's, waardoor ze niet alleen kwalitatief kunnen worden ingedeeld op basis van hun grootte, voortbeweging, enz. maar ook kwantitatief, integratie van het mechanisme en de autonomie van de robots, ' zei Hayat.
In de toekomst, dit kader voor TAEV zou kunnen helpen om SRR's effectiever te evalueren, terwijl ze ook hun beperkingen en functies identificeren die kunnen worden verbeterd. Zowel onderzoekers als fabrikanten zouden het kunnen gebruiken om de prestaties van verschillende robots bij dezelfde taken te vergelijken of om verschillende versies van dezelfde robot te evalueren. In hun krant Hayat en hun collega's bespreken ook andere mogelijke toepassingen voor het nieuwe raamwerk, met behulp van bestaande robots als voorbeelden.
"Onze bevindingen suggereren dat er een enorm potentieel is voor nieuwe robotontwerpen met autonomie om de driedimensionale ruimte te bezetten en dat geneste herconfigureerbare architecturen veel praktische toepassingen kunnen hebben, " zei Hayat. "Met dit in gedachten, onze groep werkt aan de implementatie van nieuwe intra-, onder-, en geneste herconfigureerbare robotarchitecturen voor het uitvoeren van onderhoudstaken, namelijk autonoom schoonmaken en toezicht houden."
© 2020 Wetenschap X Netwerk
 Nanodeeltjes met multifunctionele medicijnprecursor voor synergetische tumortherapie
Nanodeeltjes met multifunctionele medicijnprecursor voor synergetische tumortherapie- Wetenschappers fabriceren nieuwe ternaire keramische fosfor voor warmwitte LED's
- Mijnafval kan worden gebruikt als ingrediënt voor goedkopere productie van waterstofbrandstof
- Vuurmierengifverbindingen kunnen leiden tot huidbehandelingen
- Ongeneeslijk kankereiwit wordt medicamenteus, dankzij struik
- Het aantal klimaatontkenners in Australië is meer dan het dubbele van het wereldwijde gemiddelde, nieuwe enquête vondsten
- Everest:ik reisde de doodszone in om 's werelds hoogste weerstation te installeren
- Beweeg over Jules Verne:wetenschappers zetten oceaandobbers in om in het binnenste van de aarde te kijken
- Groot-Brittannië roept fracking op na ommezwaai van regering
- Hoe vis voedsel verkrijgen?
Hoofdlijnen
- Verschillen en overeenkomsten tussen Unicellular & Cellular
- Neteldieren controleren bacteriën op afstand
- Stijgende CO2 zorgt ook voor overlast in zoetwater, studie suggereert:
- Spin eet spin:wetenschappers ontdekken 18 nieuwe op spinnen jagende pelikaanspinnen in Madagaskar
- Studie onderzoekt de impact van leeuwen die naast giraffenpopulaties leven
- Oorsmeer zoals ijskernen - ontsluiten het verleden verborgen in oordopjes voor walvissen
- Metabolisme heeft een directe invloed op de kans op het ontwikkelen van malaria
- Wat is een zuivere eigenschap en een hybride eigenschap?
- Cellulaire ademhaling bij de mens
- Stanford-onderzoekers helpen bij het ontwikkelen van een op privacy gerichte app voor coronaviruswaarschuwing

- EBay heroverweegt toekomst van StubHub en geclassificeerde zaken

- Er is een reden waarom AI zo slecht is in gesprekken

- Door crisis getroffen Nissan-topman treedt af te midden van loononderzoek

- Sri Lanka keert premie voor hybride auto's terug


 Hoe u duizenden gratis films en tv-programma's kunt streamen
Hoe u duizenden gratis films en tv-programma's kunt streamen- Timmerwerk op maat met hulp van robots
- Keramiek hoeft niet broos te zijn:materiaalwetenschappers creëren materialen door ontwerp
- Dubbellaagse zonnecel vestigt record voor efficiënt stroomopwekking
- Virus getroffen Jaguar spoedt auto-onderdelen naar VK in koffers:rapporten
- NASA ziet tropische storm Florence nog steeds de afschuiving voelen
- Patronen van straatnetwerken onthullen een zorgwekkende wereldwijde trend naar stadsuitbreiding
- Kenmerken van Landforms
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
