Wetenschap
Autonoom systeem verbetert milieubemonstering op zee
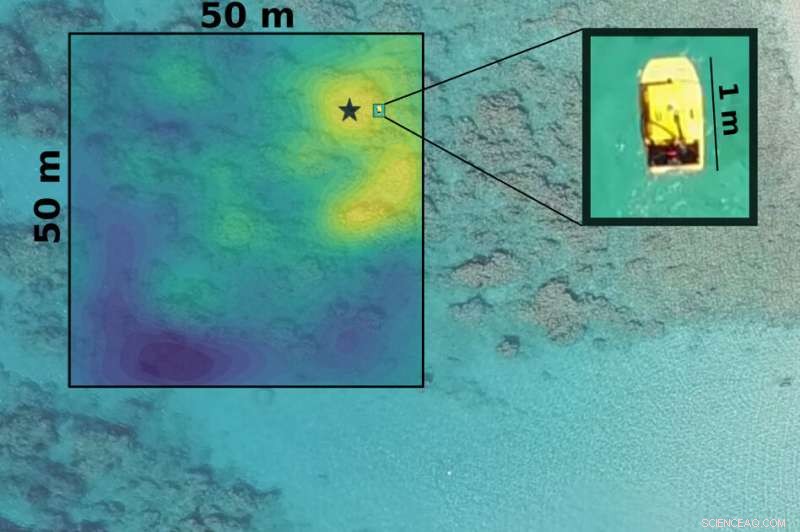
Zelfs in onontgonnen wateren, een door MIT ontwikkeld robotsysteem kan op efficiënte wijze waardevolle, moeilijk te vinden plekken om monsters te verzamelen. Wanneer geïmplementeerd in autonome boten die worden ingezet voor de kust van Barbados (foto), het systeem vond snel de meest blootgestelde koraalkop - wat betekent dat het zich op de ondiepste plek bevond - wat handig is om te bestuderen hoe blootstelling aan de zon koraalorganismen beïnvloedt. Krediet:Massachusetts Institute of Technology
Een autonoom robotsysteem, uitgevonden door onderzoekers van het MIT en de Woods Hole Oceanographic Institution (WHOI), snuffelt efficiënt de wetenschappelijk meest interessante, maar moeilijk te vinden, bemonsteringsplekken in uitgestrekte, onontgonnen wateren.
Milieuwetenschappers zijn vaak geïnteresseerd in het verzamelen van monsters op de meest interessante locaties, of "maxima, " in een omgeving. Een voorbeeld kan een bron zijn van lekkende chemicaliën, waar de concentratie het hoogst is en grotendeels onaangetast door externe factoren. Maar een maximum kan elke kwantificeerbare waarde zijn die onderzoekers willen meten, zoals waterdiepte of delen van koraalrif die het meest aan lucht zijn blootgesteld.
Pogingen om maximaal zoekende robots in te zetten, lijden onder efficiëntie- en nauwkeurigheidsproblemen. Algemeen, robots zullen heen en weer bewegen als grasmaaiers om een gebied te bestrijken, wat tijdrovend is en veel oninteressante monsters verzamelt. Sommige robots detecteren en volgen hoge concentratiesporen naar hun lekbron. Maar ze kunnen worden misleid. Bijvoorbeeld, chemicaliën kunnen vast komen te zitten en zich ophopen in spleten ver van een bron. Robots kunnen die plekken met hoge concentraties als de bron identificeren, maar zijn nergens dichtbij.
In een paper dat wordt gepresenteerd op de International Conference on Intelligent Robots and Systems (IROS), de onderzoekers beschrijven "PLUIMEN, " een systeem waarmee autonome mobiele robots veel sneller en efficiënter een maximum kunnen bereiken. PLUMES maakt gebruik van probabilistische technieken om te voorspellen welke paden waarschijnlijk tot het maximum zullen leiden, tijdens het navigeren door obstakels, verschuivende stromingen, en andere variabelen. Terwijl het monsters verzamelt, het weegt wat het heeft geleerd om te bepalen of het een veelbelovend pad moet blijven of het onbekende moet zoeken - dat mogelijk waardevollere monsters bevat.
belangrijk, PLUMES bereikt zijn bestemming zonder ooit verstrikt te raken in die lastige plekken met hoge concentraties. "Dat is belangrijk, omdat het gemakkelijk is om te denken dat je goud hebt gevonden, maar je hebt echt het goud van de dwaas gevonden, ", zegt co-eerste auteur Victoria Preston, een doctoraat student in het Computer Science and Artificial Intelligence Laboratory (CSAIL) en in het MIT-WHOI Joint Program.
De onderzoekers bouwden een door PLUMES aangedreven robotboot die met succes de meest blootgestelde koraalkop in het Bellairs Fringing Reef in Barbados detecteerde, wat betekent:het bevond zich op de ondiepste plek - wat handig is om te bestuderen hoe blootstelling aan de zon koraalorganismen beïnvloedt. In 100 gesimuleerde proeven in verschillende onderwateromgevingen, een virtuele PLUMES-robot verzamelde ook consequent zeven tot acht keer meer monsters van maxima dan traditionele dekkingsmethoden in toegewezen tijdsbestekken.
"PLUMES doet de minimale hoeveelheid exploratie die nodig is om het maximum te vinden en concentreert zich vervolgens snel op het verzamelen van waardevolle monsters daar, " zegt co-eerste auteur Genevieve Flaspohler, een doctoraat student en in CSAIL en het MIT-WHOI Joint Program.
Naast Preston en Flaspohler op het papier zijn:Anna P.M. Michel en Yogesh Girdhar, beide wetenschappers van de afdeling Toegepaste Oceaanfysica en Engineering aan de WHOI; en Nicolaas Roy, een professor in CSAIL en in de afdeling Lucht- en Ruimtevaart.
Navigeren in een afweging tussen exploiteren en verkennen
Een belangrijk inzicht van PLUMES was het gebruik van technieken van waarschijnlijkheid tot redenering bij het navigeren door de notoir complexe afweging tussen het exploiteren van wat er is geleerd over de omgeving en het verkennen van onbekende gebieden die mogelijk waardevoller zijn.
"De grootste uitdaging bij maximaal zoeken is om de robot een evenwicht te laten vinden tussen het exploiteren van informatie van plaatsen waarvan hij al weet dat ze hoge concentraties hebben en het verkennen van plaatsen waarvan hij niet veel weet, " zegt Flaspohler. "Als de robot te veel onderzoekt, het zal maximaal niet genoeg waardevolle monsters verzamelen. Als het niet genoeg onderzoekt, het kan het maximum volledig missen."
Gedropt in een nieuwe omgeving, een door PLUMES aangedreven robot gebruikt een probabilistisch statistisch model, een Gaussiaans proces genaamd, om voorspellingen te doen over omgevingsvariabelen, zoals chemische concentraties, en schattingsonzekerheden inschatten. PLUMES genereert vervolgens een verdeling van mogelijke paden die de robot kan nemen, en gebruikt de geschatte waarden en onzekerheden om elk pad te rangschikken op hoe goed het de robot in staat stelt te verkennen en te exploiteren.
Aanvankelijk, PLUMES kiest paden die willekeurig de omgeving verkennen. Elk monster, echter, geeft nieuwe informatie over de beoogde waarden in de omgeving, zoals plekken met de hoogste concentraties chemicaliën of de kleinste diepten. Het Gauss-procesmodel maakt gebruik van die gegevens om mogelijke paden te verkleinen die de robot kan volgen vanuit zijn gegeven positie om te bemonsteren van locaties met een nog hogere waarde. PLUMES gebruikt een nieuwe objectieve functie - die vaak wordt gebruikt bij machine learning om een beloning te maximaliseren - om te bepalen of de robot kennis uit het verleden moet benutten of het nieuwe gebied moet verkennen.
"Hallucinerende" paden
De beslissing waar het volgende monster wordt verzameld, is afhankelijk van het vermogen van het systeem om alle mogelijke toekomstige acties vanaf de huidige locatie te 'hallucineren'. Om dit te doen, het maakt gebruik van een aangepaste versie van Monte Carlo Tree Search (MCTS), een techniek voor padplanning die populair is geworden voor het aandrijven van kunstmatige-intelligentiesystemen die complexe games beheersen, zoals Go en Schaken.
MCTS gebruikt een beslissingsboom - een kaart van verbonden knopen en lijnen - om een pad te simuleren, of opeenvolging van bewegingen, nodig om tot een laatste winnende actie te komen. Maar bij spelletjes de ruimte voor mogelijke paden is eindig. In onbekende omgevingen, met realtime veranderende dynamiek, de ruimte is in feite oneindig, plannen uiterst moeilijk maken. De onderzoekers ontwierpen "continuous-observation MCTS, " die gebruikmaakt van het Gauss-proces en de nieuwe objectieve functie om deze onpraktische ruimte van mogelijke echte paden te doorzoeken.
De wortel van deze MCTS-beslissingsboom begint met een "belief"-knooppunt, wat de volgende onmiddellijke stap is die de robot kan nemen. Dit knooppunt bevat de volledige geschiedenis van de acties en observaties van de robot tot op dat moment. Vervolgens, het systeem breidt de boom uit vanaf de wortel naar nieuwe lijnen en knopen, kijken naar verschillende stappen van toekomstige acties die leiden tot verkende en onontgonnen gebieden.
Vervolgens, het systeem simuleert wat er zou gebeuren als het een monster zou nemen van elk van die nieuw gegenereerde knooppunten, gebaseerd op een aantal patronen die het heeft geleerd van eerdere waarnemingen. Afhankelijk van de waarde van het uiteindelijke gesimuleerde knooppunt, het hele pad krijgt een beloningsscore, met hogere waarden gelijk aan meer veelbelovende acties. Beloningsscores van alle paden worden teruggedraaid naar het hoofdknooppunt. De robot selecteert het pad met de hoogste score, zet een stap, en verzamelt een echt monster. Vervolgens, het gebruikt de echte gegevens om zijn Gauss-procesmodel bij te werken en herhaalt het "hallucinatie"-proces.
"Zolang het systeem blijft hallucineren dat er mogelijk een hogere waarde is in onzichtbare delen van de wereld, het moet blijven ontdekken, "zegt Flaspohler. "Als het uiteindelijk op een plek samenkomt, schat het dat het het maximum is, omdat het onderweg geen hogere waarde kan hallucineren, het stopt dan met verkennen."
Nutsvoorzieningen, de onderzoekers werken samen met wetenschappers van de WHOI om door PLUMES aangedreven robots te gebruiken om chemische pluimen op vulkanische locaties te lokaliseren en de methaanuitstoot in smeltende kustestuaria in het noordpoolgebied te bestuderen. Wetenschappers zijn geïnteresseerd in de bron van chemische gassen die vrijkomen in de atmosfeer, maar deze testlocaties kunnen honderden vierkante mijlen beslaan.
"Ze kunnen [PLUMEN gebruiken om] minder tijd te besteden aan het verkennen van dat enorme gebied en zich echt concentreren op het verzamelen van wetenschappelijk waardevolle monsters, ' zegt Preston.
Dit verhaal is opnieuw gepubliceerd met dank aan MIT News (web.mit.edu/newsoffice/), een populaire site met nieuws over MIT-onderzoek, innovatie en onderwijs.
 Notatiesysteem stelt wetenschappers in staat polymeren gemakkelijker te communiceren
Notatiesysteem stelt wetenschappers in staat polymeren gemakkelijker te communiceren- Batterij doorbraak met behulp van 2016 Nobelprijs molecuul
- 'S Werelds langste flessenborstelpolymeer ooit gesynthetiseerd
- 3D-atoomstructuur van TRPML1-ionkanaal gepubliceerd
- Wat gebeurt er wanneer waterstof en zuurstof combineren?
- Klimaatverandering zal naar verwachting de schadelijke algenbloei in zoetwater in de VS aanzienlijk doen toenemen
- DR Congo herziet mijnbouwcode om het meeste uit batterijaangedreven kobaltboom te halen
- Wolkenspotters helpen golfachtige formatie om officiële erkenning te verkrijgen
- Wat zijn interne golven die de Indonesische onderzeeër mogelijk tot zinken hebben gebracht?
- Nieuwe studie toont belofte voor lange termijn weersvoorspellingen in Zuid-Amerika
Hoofdlijnen
- Habitat: definitie, soorten en voorbeelden
- Wat is het voordeel van het gebruik van vlekken om naar cellen te kijken?
- Wat zijn de functies van mRNA & tRNA?
- Iberische bruine beren stammen niet af van degenen die tijdens de ijstijd uit het noorden zijn gevlucht
- Haaien spotten drones op patrouille op Australische stranden
- Gewonde zeeschildpad genezen met 3D-printen
- Onderzoek werpt nieuw licht op hoe organismen energie gebruiken in een menigte
- Wat zijn enkele kenmerken van DNA?
- Dikke eekhoorn steelt dure goederen die zijn achtergelaten voor bezorgers
- Een arbeider die vliegt:Chinese onderzoekers ontwerpen nieuwe vliegende robot

- Licht werpen op optimale materialen voor het oogsten van zonlicht onder water
- Virtuele assistenten met persoonlijkheid kunnen helpen bij psychische aandoeningen

- Terroristische activiteit voorspellen voordat het gebeurt

- Lichaamsondersteuningsapparaat helpt mensen weer te leren lopen na een beroerte, trauma


 Een dammende trend
Een dammende trend- Extreem hard en toch metaalgeleidend:onderzoekers ontwikkelen nieuw materiaal met hightech-perspectieven
- Het oplossen van een fossiel mysterie kan de zoektocht naar het leven op Mars helpen
- De rol van water in het ecosysteem
- Hoe een valkuil te bouwen
- Onderzoek toont aan dat kinderen van nature kunnen overleven, gedijen en leren tijdens lockdowns
- Brexit kan grote verstoring van datastromen EU-VK veroorzaken
- Interactieve kwantumchemie in virtual reality
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
