Wetenschap
Beter teleoperaties met een minder ingewikkeld systeem

Krediet:CC0 Publiek Domein
Bilaterale teleoperatiesystemen zijn gecompliceerde robotsystemen waarmee mensen taken op afstand of in moeilijk toegankelijke omgevingen kunnen uitvoeren. Ze kunnen op verschillende gebieden worden gebruikt, waaronder entertainmentsystemen, industriële machines, drones, en zelfs operaties die worden uitgevoerd door artsen die zich niet op dezelfde fysieke locatie bevinden als hun patiënten. Het minder gecompliceerd maken van dergelijke systemen terwijl ze hun taken met succes uitvoeren, is een sleutelfactor voor het verbeteren van de prestaties en ervaring van teleoperaties.
Een team van internationale onderzoekers pakte deze uitdaging aan door een nieuw besturingsalgoritme voor te stellen en bewees dat het mogelijk is om de complexiteit van de bilaterale teleoperatiesystemen te verminderen en tegelijkertijd de prestaties ervan te behouden.
De auteurs publiceerden hun resultaten in september in IEEE/CAA Journal of Automatica Sinica , een gezamenlijke publicatie van de IEEE en de Chinese Association of Automation.
De auteurs richtten hun studie op staatsconvergentie, een type algoritme dat veel wordt gebruikt bij het modelleren van teleoperatiesystemen en de interacties die binnen een systeem plaatsvinden. Het wordt ook beschouwd als een elegante ontwerpprocedure waardoor de teleoperatiesystemen op een autonome manier kunnen functioneren en een gewenst dynamisch gedrag kunnen opleggen tussen een "master" -apparaat dat door mensen wordt bediend en een "slaaf" -apparaat, het apparaat of de robot die de door de 'master' opgedragen actie op afstand uitvoert.
Vergeleken met standaard staatsconvergentie, de auteurs gebruikten een minder gecompliceerde versie van het algoritme, het samengestelde verklaarde convergentieschema, door het aantal communicatiekanalen tussen de master- en slave-apparaten te verminderen, maar toch het gewenste resultaat bereikt:de dynamische respons die van het teleoperatiesysteem werd verwacht. Volgens de auteurs "is in eerdere studies nog geen versie met verminderde complexiteit van het staatsconvergentieschema gerapporteerd."
De auteurs hebben vervolgens hun theorieën getest en bewezen in gesimuleerde omgevingen met een enkel vrijheidsgraadsysteem, een systeem dat in staat is om één type actie uit te voeren zoals ontworpen. De auteurs voerden ook vergelijkende onderzoeken uit en hun resultaten toonden aan dat het voorgestelde systeem betere tijdelijke prestaties vertoonde.
Volgende, de auteurs zullen doorgaan met het testen van het vermogen en het potentieel van het nieuwe systeem om verschillende omstandigheden te weerstaan en de resultaten analyseren die zijn afgeleid van parametrische onzekerheden.
 Nieuwe materialen helpen volumetrisch 3D-printen uit te breiden
Nieuwe materialen helpen volumetrisch 3D-printen uit te breiden- de tijdloze, complementaire smaak van oesters en champagne - uitgelegd
- Studie van olifant, capibara, mensenhaar vindt dat dikker haar niet altijd sterker is
- De kosten van ethanol verlagen, andere biobrandstoffen en benzine
- Hoe water het substraat in het enzym helpt
Hoofdlijnen
- Parasitaire planten vertrouwen op een ongebruikelijke methode om hun zaden te verspreiden
- Nieuwe kaarten laten zien dat de krimpende wildernis op eigen risico wordt genegeerd
- Wat zijn de twee belangrijkste functies van nucleïnezuur in levende wezens?
Nucleïnezuren zijn kleine stukjes materie met grote rollen om te spelen. Genoemd naar hun locatie - de kern - deze zuren dragen informatie die cellen helpt bij het maken va
- Symbiose en celevolutie:Lynn Margulis en de oorsprong van eukaryoten
- Onderzoek toont aan dat walvissen, al een bedreigde diersoort, kan een vage toekomst tegemoet gaan
- Hoe verlaat mRNA de kern?
- Hoe elektroforese te analyseren
- Een bijtend rapport:onderzoek toont aan dat klimaatverandering een grote bedreiging vormt voor hommels
- Chromosomale afwijkingen: wat is het?, Typen en oorzaken
- Studie onderzoekt interacties tussen wereldleiders op sociale media
- Minivatapparaat onderzoekt bloedinteracties bij malaria, sikkelcelziekte

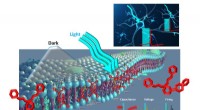
- Een lichtgevoelige verbinding maakt warmteloze membraanmodulatie in fotoschakelaars mogelijk
- DNS-over-HTTPS:waarom de nieuwste privacytechnologie van het web voor ophef zorgt

- Kleine bedrijven steeds vaker doelwit van cybercriminelen


 De oudste kleur van de aarde was roze
De oudste kleur van de aarde was roze - Magma-oceaan is mogelijk verantwoordelijk voor het vroege magnetische veld van de manen
- Schone koolstofnanobuisjes met uitstekende eigenschappen
- Impact van klimaatverandering op microbiële biodiversiteit hangt af van milieukwaliteit
- Explainer:wat is het online forum 8chan?
- Technologieën voor het mobiele netwerk van de zesde generatie
- Is genie genetisch?
- Een cirkeldiagram in een grafiek weergeven Wanneer de categorieën elkaar overlappen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Swedish | German | Dutch | Danish | Norway | Portuguese |

-
Wetenschap © https://nl.scienceaq.com
